采矿系统的输出控制
文献发布时间:2023-06-19 09:29:07
本申请是2016年5月30日提交的,申请号为201610367622.7,名称为“采矿系统的输出控制”的中国发明专利申请的分案申请。
技术领域
本发明涉及长壁采矿系统的控制。
背景技术
本发明涉及长壁采矿系统的控制。所述长壁采矿系统包括长壁剪切机和输送机,例如刮板输送机(armored face conveyor,“AFC”)或梁式分段装载机(beam stageloader,“BSL”)。
发明内容
用于地下采矿的长壁采矿系统包括,例如,从采掘工作面移除矿材料(例如,煤)的剪切机以及从材料被开采的区域运送开采的物料到处理(例如,压碎、存储等等)区域的输送机。所述剪切机被一个或多个驱动装置(例如,马达)驱动沿着采掘工作面改变它的位置以及从所述采掘工作面移除开采的物料。刮板输送机包括,例如,第一链轮和第二链轮,其中链条被提供围绕所述第一链轮和第二链轮。所述链条被一个或多个驱动装置(例如,主门马达、尾门马达等等)驱动,并且所述链条围绕所述链轮的移动导致所述输送机传送开采的物料。
随着剪切机沿着AFC移动以及物料从采掘工作面被移除,AFC在轻负载(under-loaded)条件下操作是可能的。例如,当AFC上有相对小的数量的开采物料时(例如,与AFC的最大负载比较),所述采矿系统可以具有可利用的容量。如果一确定采矿系统不在满容量下操作,所述采矿系统的性能就被提高,所述采矿系统可以使用可利用的容量并且从矿场移除更多物料。例如,通过提高所述剪切机的速度和/或输送机的速度,采矿系统的性能可以被提高。同样地,如果采矿系统在满容量以上被操作,可降低采矿系统的性能以避免对采矿系统造成损害。
本发明涉及利用控制器控制长壁采矿系统的剪切机和/或输送机的速度以调节所述采矿系统的输出。所述控制器接收与所述剪切机的位置和/或输送机的负载相关的信号并且确定所述采矿系统的输出。所述控制器可以基于所述采矿系统的输出修改或调节(例如,提高或降低)所述剪切机和/或输送机的速度,以便改善所述采矿系统的生产率。例如,提高所述剪切机的速度导致更多的开采的物料从采掘工作面被移除,而提高输送机的速度导致开采的物料被传输到处理区域更快。
在一些实施例中,本发明提供一种计算机执行的用于控制采矿系统操作的方法,所述采矿系统包括剪切机和输送机。所述方法包括:利用处理器基于来自第一传感器的、与所述剪切机的位置相关的第一信号确定所述剪切机的位置;利用所述处理器基于来自第二传感器的、与所述输送机的负载相关的第二信号确定所述输送机的负载;利用所述处理器基于所确定的所述剪切机的位置和所确定的所述输送机的负载确定所述采矿系统的输出,利用所述处理器基于所确定的所述采矿系统的输出产生用于第一驱动装置的第一控制信号,以控制所述剪切机的速度;利用所述处理器基于所确定的所述采矿系统的输出产生用于第二驱动装置的第二控制信号,以控制所述输送机的速度。
在其他的实施例中,本发明提供一种用于采矿系统的控制器,所述采矿系统包括剪切机和输送机。所述控制器包括非暂时性计算机可读介质和处理器,所述控制器包含存储在所述非暂时性计算机可读介质内的计算机可执行的指令,用于控制所述采矿系统操作以:基于来自第一传感器的、与所述剪切机的位置相关的第一信号确定所述剪切机的位置;基于来自第二传感器的、与所述输送机的负载相关的第二信号确定所述输送机的负载;基于所确定的所述剪切机的位置和所确定的所述输送机的负载确定所述采矿系统的输出,基于所确定的所述采矿系统的输出产生用于第一驱动装置的第一控制信号,以控制所述剪切机的速度;基于所确定的所述采矿系统的输出产生用于第二驱动装置的第二控制信号,以控制所述输送机的速度。
在其他的实施例中,本发明提供一种用于采矿系统的控制器,所述采矿系统包括剪切机和输送机。所述控制器包括非暂时性计算机可读介质和处理器,所述控制器包含存储在所述非暂时性计算机可读介质内的计算机可执行的指令,用于控制所述采矿系统操作来:基于来自第一传感器的、与所述剪切机的位置相关的第一信号确定所述剪切机的位置;基于来自第二传感器的、与所述输送机的负载相关的第二信号确定所述输送机的负载;基于所确定的所述剪切机的位置和所确定的所述输送机的负载确定所述采矿系统的输出,基于所确定的所述采矿系统的输出产生用于第一驱动装置的第一控制信号,以控制所述剪切机的速度。
在其他的实施例中,本发明提供一种用于采矿系统的控制器,所述采矿系统包括剪切机和输送机。所述控制器包括非暂时性计算机可读介质和处理器,所述控制器包含存储在所述非暂时性计算机可读介质内的计算机可执行的指令,用于控制所述采矿系统操作来:基于来自第一传感器的、与所述剪切机的位置相关的第一信号确定所述剪切机的位置;基于来自第二传感器的、与所述输送机的负载相关的第二信号确定所述输送机的负载;基于所确定的所述剪切机的位置和所确定的所述输送机的负载确定所述采矿系统的输出,基于所确定的所述采矿系统的输出产生用于第一驱动装置的第一控制信号,以控制所述输送机的速度。
在本发明的任何实施例被详细解释之前,可以理解,本发明在应用方面不受在下文中示出的或在附图示出的具体的组件的结构和排列的限制。本发明可以具有其他实施例或可以以各种方式被实施或被实现。同样地,可以理解,于此使用的措辞和术语是以描述为目的并且不应该认为是限制。“包括”、“包含”或“具有”以及于此它们的变化的使用意味着包括其后列出的项以及它们的等同以及其他的项。如果没有另外的说明和限制,术语“安装”、“连接”、“支撑”以及“联接”和它们的变化被广义上使用并且包含直接和间接安装、连接、支撑和联接。
此外,应当理解,本发明的实施例可以包括硬件、软件以及电子元件或模块,这些硬件、软件和电子部件或模块为了描述的目的而被示出或描述成好像这些零部件的大部分仅仅是以硬件的形式来实施。然而,本领域技术人员基于对本文的详细描述的理解将明白,在至少一个实施例中,本发明的以电子为基础的方面可通过以一个或多个比如微处理器和/或专用集成电路(ASICs)的处理器单元来执行的软件(比如存储在非易失的计算机可读介质中)来实施。因此,应当注意,多个基于硬件和软件的设备以及多个不同结构的部件可用来实施本发明。例如,在说明书中所描述的“服务器”和“计算设备”可包括一个或多个处理单元、一个或多个计算机可读介质模块、一个或多个输入/输出界面和连接所述部件的不同连接装置(比如系统总线)。
本发明的独立的方面通过考虑具体实施方式和附图将会变得清楚。
附图说明
图1是长壁采矿系统的透视图;
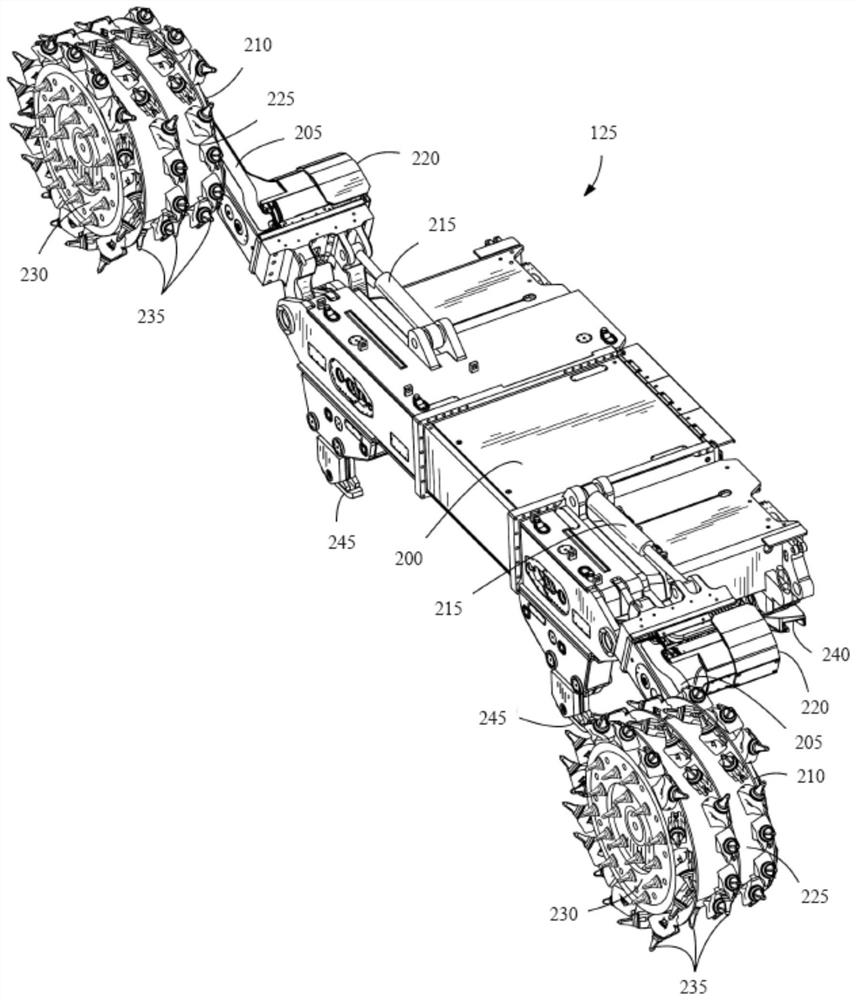
图2是与图1的采矿系统关联的长壁剪切机的透视图;
图3是与图1的采矿系统关联的输送机的部分透视图;
图4示出了根据本发明一实施例的用于图1的采矿系统的控制器;
图5是示出在图2的剪切机的位置和承载于图3的输送机的开采的物料的数量之间的关系的示意图;
图6是示出了沿图3的输送机的长度的链条应力变化的方式的示意图;
图7是用于优化图1的采矿系统的流程;
图8是用于优化图1的采矿系统的另一流程;
图9是用于优化图1的采矿系统的另一流程。
具体实施方式
于此描述的本发明关于长壁采矿系统。所述长壁采矿系统包括,例如,长壁剪切机、诸如刮板输送机(“AFC”)或梁式分段装载机(“BSL”)的输送机以及控制器。所述控制器可操作来接收与所述长壁采矿系统的特征(例如,剪切机的位置,输送机的负载等等)相关的一个或多个信号并且基于所述特征驱动所述采矿系统的输出。所述控制器还基于所述采矿系统的输出可操作来控制所述剪切机和/或输送机的速度。所述剪切机和/或输送机的速度可以被调节或调整以不过载所述输送机或负担过度剪切机而提高所述采矿系统的生产率。以描述的目的,本发明于本文中与输送机相关的一般性的被描述。
图1示出长壁采矿系统100。采矿系统100包括从采掘工作面110延伸出去的卸料输送机105。两个输送机115和120沿所述采掘工作面110延伸。长壁剪切机125安装于所述输送机115和120上沿大致平行于所述采掘工作面110的横向移动。所述输送机115和120包括驱动端,所述驱动端限定放置于临近所述卸料输送机105的卸料部分130。所述卸料输送机105包括粉碎机135,所述粉碎机135用于减小开采的物料的尺寸用于进一步处理和存储。输送机平移设备140可操作来朝着采掘工作面110移动输送机115和120。在一些实施例中,所述长壁采矿系统在地下煤矿操作中使用并且进一步包括多个动力顶部支撑(未示出)。
如图2所示,每个长壁剪切机125包括一般矩形的底盘200以及一对咬合臂205,每个咬合臂205支撑切刀组件210。臂205枢接于所述底盘200的相对端并且被驱动器215驱动从而转动,所述驱动器215联接于臂205和底盘200之间。每个臂205支撑切刀马达220,所述切刀马达220可操作来旋转驱动切刀组件210。所述切刀组件210通常为圆柱形并且包括第一切割表面225和第二切割表面230,当长壁剪切机大致平行于采掘工作面110移动时,所述第一切割表面225用于从采掘工作面110移除物料,所述第二切割表面230被所述切刀组件210的端面限定,当所述长壁剪切机125大致正常的向采掘工作面110移动时,所述第二切割表面230用于从采掘工作面移除物料。所述第一切割表面225通常可以是圆柱形,而第二切割表面通常可以是圆形、环形、圆锥形、或除了这些以外,与根据物料类型所述切割表面225、230想要切割的截面相应的圆锥形。第一和第二切割表面225、230可以被提供以多种配置的多个切割齿235,用于从采掘工作面110移除物料。在一些示范实施例中,齿235被安装在第一和第二切割表面225、230上。
所述长壁剪切机125还包括一对内侧支撑脚240和一对外侧支撑脚245(仅仅外侧支撑脚中的一只在图2中可见)。所述内侧支撑脚和外侧支撑脚240、245被配置为或可操作来安装于输送机115、120,以致长壁剪切机125可以沿所述输送机115、120从卸料部分130到所述输送机115、120的回归端横向移动并且然后再返回。所述长壁剪切机120被驱动装置(例如,变速马达)沿输送机115、120驱动。
图3示出类似于图1的输送机115、120的长壁输送机300的部分。所述输送机300包括返回端305、在所述返回端305和卸料部分130(参考图1)之间来回的传送元件或链310、以及邻近所述返回端305的传感器组件315。所述链310被驱动装置驱动,例如可变速马达,其关联于卸料部分130。所述返回端305包括车架(frame)320、安装在所述车架320上的链轮或卷取轴325、以及至少一个的液压缸(未示出)。基于液压缸的延伸和回缩,所述车架320相对卸料部分130移动。所述链310通过围绕所述卷取轴325在所述卸料部分130和返回端305之间连续循环来回。所述链310包括多个安装在链310上的飞行构件330,所述飞行构件在所述链310的来回方向间隔相距第一间距。
图4示出与采矿系统100关联的控制器400。所述控制器400被连接或联接于多种附加的模块或组件,例如用户界面模块405、一个或多个指示器、电源模块415、一个或多个传感器420、剪切机参数模块425、输送机参数模块430、数据存储或数据库420、第一驱动装置和驱动器440(例如,与一个或多个剪切机关联)以及第二驱动装置和驱动器445(例如,与一个或多个输送机关联)。在一些实施例中,所述第一驱动装置和驱动器包括第一马达和第一马达驱动器,以及所述第二驱动装置和驱动器包括第二模块和第二马达驱动器。在一些实施例中,第一马达和第一马达驱动器440以第二马达和马达驱动器445中的每一个包括开关设备组件。于本文中描述的本发明的实施例描述关于马达和马达驱动器的驱动装置和驱动器。
例如,一个或多个传感器420是被配置为或可操作来测量或检测所述剪切机125的特征(例如,剪切机的位置,剪切机的速度等等)的传感器、是被配置为或可操作来测量或检测输送机300的特征(例如,链的位置、链的速度、链的张力等等)的传感器、是被配置为或可操作来测量或检测电学特征(例如,电流、电压、功率因子、扭矩、速率、输入功率、输出功率等等)的换能器、是可操作来生成与输送机的负载相关的信号的测压元件或传感器、等等。在一些实施例中,所述输送机包括多个在输送机上不同位置的测压元件组件。然后所述输送机的负载可以基于来自于测压元件组件的测量的总和或平均被确定。在一些实施例中,所述传感器组件类似于在专利号为8,931,628、名称为“在链式张力板中的自动刮板输送机链张力测压元件”的美国专利的那些公开,其全部内容通过引用于本文中合并。在一些其他的实施例中,所述传感器组件类似于在专利号为8,636,140、名称为“链张力传感器”的美国专利的那些公开,其全部内容通过引用于本文中合并。
所述控制器400包括硬件和软件的组合,除了其他方面以外,其可操作来确定采矿系统100的输出、控制采矿系统100的操作、激活一个或多个指示器410(例如,液晶显示器[“LED”])、监控采矿系统的操作等等。在一些实施例中,所述控制器400包括多个电学和电子的组件,其提供对控制器400和/或采矿系统100内的组件和模块的能量、操作的控制以及保护。例如,除了其他方面以外,控制器400包括处理单元450(例如,微处理器、微控制器、或其他合适的可编程器件)、存储器455、输入单元460和输出单元465。除了其他方面以外,所述处理单元450包括控制单元470、算术逻辑单元(“ALU”)475以及多个寄存器480(在图4中示出一组寄存器),利用例如改进的哈佛结构(modified Harvard architecture),冯诺依曼结构等已知的计算机结构实施。处理器单元450、存储器455、输入单元460和输出单元465以及连接于控制器400的多个模块通过一个或多个控制和/或数据总线(例如,公共总线485)连接。所述控制和/或数据总线以示例的目的在图4中被一般性地示出。用于在多个模块之间互联和通信的一个和多个控制和/或数据总线的使用通过于本发明于本文中描述对于本领域技术人员而言是已知的。在一些实施例中,控制器400部分或完全地在半导体芯片上实施,该半导体芯片是现场可编程阵列半导410体(“FPGA”)、专用集成电路(“ASIC”)等。
存储器455包括例如程序储存区和数据储存区。程序储存区和数据储存区可以包括不同类型的存储器的组合,诸如只读存储器("ROM")、随机存取存储器("RAM")(例如动态RAM["DRAM"]、同步DRAM["SDRAM"]等)、电可擦可编程只读存储器("EEPROM")、闪存、硬盘、SD卡或其它合适的磁性、光学、物理或电子存储器装置或其他数据结构。处理单元450被连接到存储器455并执行被存储在存储器455的RAM(例如在执行期间)、存储器455的ROM(例如在基本永久基础上)或诸如其它存储器或磁盘的其它非暂时性计算机可读介质中的软件指令。包括在采矿系统100的实施中的软件可以被储存在控制器400的存储器455中。所述软件包括例如固件、一个或多个应用程序、程序数据、筛选程序、规则、一个或多个程序模块以及其它可执行指令。其中,控制器400被构造成从存储器取回并执行涉及本文描述的控制流程和方法的指令。在其它结构中,控制器400包括另外的、更少的或不同的部件。
所述剪切机参数模块425被连接或被关联于一个或多个剪切机125,其被第一驱动装置和驱动器400驱动。所述剪切机参数模块425被配置为或可操作来接收关联于一个或多个剪切机125的一个或多个参数(例如,剪切机位置、剪切机速度、马达速度、马达电流、马达电压、输入功率等等)的信号。在一些实施例中,所述剪切机参数模块425生成与剪切机参数相关的信号。在其他的实施例中,剪切机参数模块425包括或被连接于一个或多个传感器420并接收来自于与所述剪切机参数相关的一个或多个传感器的信号。
所述输送机参数模块430被连接或被关联于一个或多个输送机300,其被第二驱动装置和驱动器445驱动。所述输送机参数模块430被配置为或可操作来接收关联于一个或多个输送机参数(例如,输送机负载或装载、输送机速度、马达速度、马达电流、马达电压、输入功率等等)的信号。在一些实施例中,所述输送机参数模块430生成与输送机参数相关的信号。在其他的实施例中,所述输送机参数模块430包括或被连接于一个或多个传感器420并接收来自于与所述输送机参数相关的一个或多个传感器420的信号。
马达440、445通过来自于控制器400或其他关联的控制器的控制信号被控制。马达440、445也被联接于齿轮减速箱以减小马达440、445的旋转速度以适于剪切机125和输送机的旋转速度。在一些实施例中,独立地使用传感器420和一个或多个存储的程序或模块,所述控制器400被配置为或可操作来控制马达440、445和采矿系统100。在其他的实施例中,所述控制器400被配置为或可操作来基于手动输入或自动控制的组合控制马达440、445和采矿系统100。
所述用户界面模块405被用于控制或监控剪切机125、输送机300和/或采矿系统100。例如,所述用户界面模块405可操作来被联接于所述控制器400以控制剪切机125的速度、输送机300的速度、马达440、445的速度等。所述用户界面模块405可以包括对采矿系统100要求达到控制和监控的需求水平的数字和模拟的输入或输出设备的组合。例如,用户界面模块405包括显示器和输入装置,诸如触摸屏显示器、多个旋钮、表盘、开关、按钮等。显示器例如是液晶显示器("LCD")、发光二极管("LED")显示器、有机LED("OLED")显示器、电致发光显示器("ELD")、表面传导电子发射体显示器("SED")、场致发射显示器("FED")、薄膜晶体管("TFT")LCD等。在其他的结构中,显示器是超级主动矩阵OLED(“AMOLED”)显示器。用户界面模块405还能够被配置为或可操作来实时或大致实时地显示与采矿系统100相关联的状态或数据。例如,用户界面模块405被配置为或可操作来显示所测量的采矿系统100的电特征(例如,剪切机125、输送机300等)、采矿系统100的状况、故障情况(例如,松链,零张力链条等)、在输送机300开采的物料的数量等。在一些实施例中,联合控制用户界面模块405和一个或多个指示器410(例如LEDs、扬声器等),以提供采矿系统100的状态或状况的视觉指示。
虽然单个的控制器在图4中被示出,在其他的构造中,所述控制器400可以被分成多个控制器。例如,所述控制器400可以被分成统一控制单元(consolidated controlunit,“CCU”)、可编程控制单元(“PCU”)等。CCU可以放置于防爆外壳内并且提供对输送机系统的控制。PCU是固有地安全系统,其与CCU配合,除了这些方面以外,以停止、禁止、跳闸(tripping)等输送机的操作。
如前文指出的,在一些实施例中,所述控制器400被配置为或可操作来基于是否采矿系统100充分使用(例如接近100%)控制一个或多个剪切机125的速度。所述控制器400也被配置为或可操作来接收来自于一个或多个传感器420的信号,所述一个或多个传感器420与马达440、445、剪切机125、输送机300或采矿系统100的其他组件关联。例如,来自于传感器420的信号与剪切机125的位置、输送机300的负载等相关。所述控制器400然后处理和分析所述信号以确定所述采矿系统100的输出。所述采矿系统的输出是长壁采矿系统10的生产率的衡量,以及可以被每单位时间(例如,分钟、小时等)的单位吨数(例如,开采的物料)来衡量。除了这些方式以外,采矿系统的输出依赖于被剪切机125从采掘工作面移除的开采的物料的数量、输送机300上负载的开采的物料的数量、以及剪切机125的速度。在一些实施例中,所述控制器400通过对比采矿系统的输出与预定的阈值(例如采矿系统100的可能的最大输出)确定是否优化采矿系统100的输出。例如,所述预定的阈值是采矿系统100的最大(安全)输出的90%-100%(例如,不会超负载输送机300或剪切机125负担过度的输出)。然后控制器400基于所述输出和阈值的对比控制剪切机125的速度。在一些实施例中,控制器400基于与采矿系统100有关的函数控制剪切机125的速度。在一些实施例中,控制器400基于与采矿系统100的输出有关的查找表控制剪切机125的速度。剪切机的速度可以是剪切机沿输送机300移动的速度和/或切刀组件210旋转的速度。
附加地或可选地,所述控制器400被配置为或可操作来基于是否所述采矿系统100充分使用(例如接近100%)控制一个或多个输送机300的速度。所述控制器也被配置为或可操作来接收来自于一个或多个传感器420的信号,所述传感器420与所述马达440、445、剪切机125、输送机300或采矿系统100的其他组件关联。例如,来自于传感器420的信号与剪切机125的位置、输送机300的负载等相关。然后控制器400处理和分析所述信号以确定采矿系统的输出。所述采矿系统的输出是采矿系统100的生产率的衡量,以及可以被每单位时间(例如,分钟、小时等)的单位吨数(例如,开采的物料)来衡量。除了这些方式以外,采矿系统的输出依赖于被剪切机125从采掘工作面移除的开采的物料的数量、输送机300上负载的开采的物料的数量、以及剪切机125的速度。在一些实施例中,所述控制器400通过对比采矿系统的输出与预定的阈值(例如采矿系统100的可能的最大输出)确定是否优化采矿系统100的输出。例如,所述预定的阈值是采矿系统100的最大(安全)输出的90%-100%(例如,不会超负载输送机300或剪切机125负担过度的输出)。然后控制器400基于所述输出和阈值的比较来控制输送机300的速度。在一些实施例中,控制器400基于与采矿系统100有关的函数控制输送机300的速度。在一些实施例中,控制器400基于与采矿系统100的输出有关的查找表控制输送机300的速度。
采矿系统100的输出是采矿系统100的生产率的衡量。在操作过程中,基于开采的物料、开采的调节、系统配置等,采矿系统100的输出更好地接近采矿系统100的最大可能输出。在任何给定时间采矿系统100的输出可以被表示为采矿系统100的最大输出的百分比(%)。同样地,当采矿系统100进行最大输出的100%(例如,在90%和100%之间),长壁采矿系统达到最大生产率和最大利用率。如果采矿系统的输出小于最大输出,控制器400调节(例如,提高)剪切机125和/或输送机300的速度以提高采矿系统100的输出。
基于剪切机125的位置和/或输送机300的负载(例如,开采的物料、功率消耗),采矿系统100的输出被确定。图5和图6示出了在剪切机125的位置和在输送机300上的开采的物料的数量之间、以及在输送机链条310上的张力(其与输送机的负载、输送机的功率消耗等相关)的关系。特别地,图5是示出了在剪切机125的位置和在输送机300上负载的开采的物料的数量(例如,吨每米[t/m])之间的关系的示意图600,以及示出沿着坐标系统的x-轴时间(例如,分钟)。所述剪切机125的位置被描述为相对于采掘工作面110(例如,在采掘工作面110的主门和尾门之间)的百分比(%)。例如,如果剪切机125位于采矿系统100的极远端(例如,尾门),剪切机的位置的百分比是100%(例如,相对于沿着采掘工作面的剪切机125全范围的移动)。随着剪切机125的位置接近100%位置,负载在输送机300上的开采的物料的数量也相应于剪切机125的位置增长。因此,采矿系统100的输出沿着采掘工作面110与剪切机125的位置相关,以及剪切机的位置可以被用于确定和/或预报采矿系统100的输出。
类似地,图6是相对于时间的链条310的不同位置的应力(例如,吨)的示意图700。例如,示意图700包括上主门应力、上尾门应力、下主门应力和下尾门应力。应力成吨施加并且也与剪切机125的位置和输送机300的负载(例如,负载于输送机300上的开采的物料的数量)相关。对比图5,随着负载于输送机300上的开采的物料的数量的增加,在链条310内的应力也随着增加。类似地,随着剪切机125的位置增加,在链条310内的应力也随着增加。在一些实施例中,在链条310内的应力总量、在链条310内的应力平均值、和/或在链条310的特定位置的应力被用于确定或计算输送机300的负载。在其他的实施例中,在链条310内的应力总量、在链条310内的应力平均值、和/或在链条310的特定位置的应力被考虑作为输送机300的负载的典型。因此,输送机300的负载和/或剪切机125的位置可以被用来确定采矿系统100的输出。
流程800、900和1000与关于确定采矿系统100的输出和基于采矿系统的输出控制剪切机125和/或输送机300的速度关联并且于本文描述。关于流程800、900和1000的于本文描述的各种步骤能够被同时地、平行地、或不同与展现的执行的连续方式有次序地执行。流程800、900和1000也可以能够利用被展示出的示范实施例更少的步骤执行。此外,控制400可操作来同时或与其他流程串联执行流程800、900和1000。
图7示出用于控制采矿系统100的流程800。在步骤805中,控制器400接收与剪切机125的位置相关的第一信号。控制器400被配置为或可操作来确定或计算关于剪切机125的位置的值,例如,作为沿着采掘工作面110的位置百分数(%)(步骤810)。在步骤815中,控制器400接收与输送机300的负载相关的第二信号。控制器400被配置为或可操作来确定或计算关于输送机300的负载的值,例如,以每米单位吨数(步骤820)。
在步骤825中,控制器400基于在步骤810中确定的特征(例如,剪切机125的位置)和步骤820中确定的特征(例如,输送机300的负载)确定或计算采矿系统100的输出。通过确定在沿着采掘工作面110横向移动的过程中剪切机125移除多少吨开采的物料、在单位时间(例如,分钟,小时等)输送机300向卸载部分130运送多少吨开采的物料等,采矿系统100的输出可以被计算。在步骤830中,控制器400分析采矿系统100的输出。在一些实施例中,控制器400被配置为或可操作来对比采矿系统的输出和预定阈值。例如,预定阈值是采矿系统100的最大输出。如前文所述,采矿系统100的输出可以被描述为采矿系统100的最大输出的百分数(%)。额外地或可选地,控制器可以利用与采矿系统100相关的函数和/或查找表(例如,现有的采矿系统的输出作为函数或查找表输出并且函数或查找表产生必须的控制信号或参数)分析采矿系统的输出。基于采矿系统100的输出的分析,控制器400可以被配置为或可操作来控制剪切机125的速度(步骤835)和输送机300的速度(步骤840)。例如,控制器400可以提高驱动剪切机125的马达440的速度以使得从采掘工作面110移除的开采的物料的数量增加。控制器400也可以提高驱动输送机300的马达445的速度以使得输送机300的速度和从采掘工作面110的被传送的开采的物料的数量增加。流程800可以在采矿系统100的操作过程中连续地被执行以不断地调节或修改剪切机125和输送机300的速度以便最大化采矿系统100的生产率。在一些实施例中,采矿系统100的输出不被确定并且剪切机125的位置和输送机300的负载被用于直接控制剪切机125和输送机300的速度。
图8示出用于控制采矿系统100的流程900。在步骤905中,控制器400接收与剪切机125的位置相关的第一信号。控制器400被配置为或可操作来确定或计算剪切机125的位置的值,例如,作为沿着采掘工作面110的位置的百分数(%)(步骤910)。在步骤915中,控制器400接收与输送机300的负载相关的第二信号。控制器400被配置为或可操作来确定输送机300的负载的值,例如,以每米单位吨数(步骤920)。
在步骤925中,控制器400基于在步骤910中确定的特征(例如,剪切机125的位置)和在步骤920中确定的特征(例如,输送机300的负载)确定或计算采矿系统100的输出。例如可以通过沿着采掘工作面110的横向移动的过程中剪切机移除多少吨开采的物料、在单位时间(例如,分钟、小时等)输送机300朝着卸料部分130传送多少吨开采的物料等,采矿系统100的输出可以被计算。在步骤930中,控制器400分析采矿系统100的输出。在一些实施例中,控制器400被配置成或可操作来对比采矿系统输出和预定的阈值。例如,预定的阈值是采矿系统100的最大输出。如前文所述,采矿系统100的输出可以被描述为采矿系统100的最大输出的百分数(%)。额外地或可选地,控制器400利用与采矿系统100相关的函数和/或查找表(例如,现有的采矿系统的输出作为函数和查找表的输出并且函数或查找表生成必须的控制信号或参数)可以分析采矿系统100的输出。基于采矿系统100的输出的分析,控制器400被配置为或可操作来控制剪切机125的速度(步骤935)。例如,控制器400可以提高驱动剪切机125的马达440的速度以增加从采掘工作面110移除的开采的物料的数量。流程900可以在采矿系统100的操作过程中被连续的执行以不断地调节或修改剪切机125和输送机300的速度以最大化采矿系统100的生产率。在一些实施例中,采矿系统的输出不被确定并且剪切机125的位置和输送机300的负载被直接用于控制剪切机125和输送机300的速度。
图9示出用于控制采矿系统100的流程1000。在步骤1005中,控制器400接收与剪切机125的位置相关的第一信号。控制器400被配置为或可操作来确定或计算剪切机125的位置的值,例如,作为沿着采掘工作面110的位置百分数(%)(步骤1010)。在步骤1015中,控制器400接收与输送机300的负载相关的第二信号。控制器400被配置为或可操作来确定输送机300的负载的值,例如,以每米单位吨数(步骤1020)。
在步骤1025中,控制器400基于在步骤1010中确定的特征(例如,剪切机125的位置)和在步骤1020中确定的特征(例如,输送机300的负载)确定或计算采矿系统100的输出。例如,通过确定沿着采掘工作面110的横向移动过程中剪切机125移除多少吨开采的物料、在单位时间(例如,分钟、小时等)输送机300朝着卸料部分130传送多少吨开采的物料等,采矿系统100的输出可以被计算。在步骤1030中,控制器400分析采矿系统100的输出。在一些实施例中,控制器400被配置为或可操作来对比采矿系统的输出和预定的阈值。例如,预定的阈值是采矿系统100的最大输出。如前文所述,采矿系统100的输出可以被描述为采矿系统100的最大输出的百分数(%)。额外地或可选地,控制器400利用与采矿系统100相关的函数和/或查找表(例如,现有的采矿系统的输出作为函数和查找表的输出并且函数或查找表生成必须的控制信号或参数)可以分析采矿系统100的输出。基于采矿系统100的输出的分析,控制器400被配置为或可操作来控制输送机300的速度(步骤1035)。例如,控制器400可以提高驱动输送机300的马达445的速度以提高输送机300的速度和从采掘工作面110传送的开采的物料的数量。步骤1000可以在采矿系统100的操作过程中连续的被执行以最大化采矿系统100的生产率。在一些实施例中,采矿系统100的输出不被确定并且剪切机125的位置和输送机300的负载被用于直接控制剪切机125和输送机300的速度。
在一些实施例中,基于输送机300的负载和/或采矿系统100的输出,控制器400也被配置为或可操作来可选地能够或禁用采矿系统100的附加的特征或控制,例如岸推(bankpush)、蛇形负载(snake loading)、双蛇(double snake)、自动拖拽(auto-drag)、多重前进(multiple advance)、快速定向工作面(slewing the face)等等。
例如,随着剪切机沿着采掘工作面110前进,输送机300朝着采掘工作面推进以准备剪切机125的下一次的通过。与推进输送机300关联的功率在这种方式数量下大约等于输送机300的负载的20%。结果从推进输送机300提供负载,对于沿着输送机300传送开采的物料具有更少的负载。但是,从开采的物料负载于输送机300的数量也有自然的减少。例如,当剪切机125到达采掘工作面的端部,剪切机必须改变方向并且执行其他操作以允许输送机300上开采的物料没有替代的尽快被运走,这样,减少负载于输送机300上的开采的物料。因此,为了提高采矿系统100的输出,在一般的操作过程中(例如,不在采掘工作面110的端部、在采掘工作面110的10%和90%之间、在采掘工作面110的20%和80%之间等),控制器400可以减缓或禁止输送机前进(例如,减少输送机的前进速度、阻止输送机前进[例如,减少传送速度至0等)。结果,有额外的输送机负载存在以致能够用于提供剪切机125的速度和/或输送机300的速度。随着剪切机接近采掘工作面110的端部以及负载于输送机300的开采的物料减少,控制器400可以允许输送机300朝着采掘工作面110前进(例如,提高输送机前进速度)。
因此,除了这些方式以外,本发明整体上可以提供基于采矿系统的输出用于控制在采矿系统中的剪切机和/或输送机的速度的系统和方法。
- 采矿系统的输出控制
- 采矿系统的输出控制