陀螺仪传感器的校正方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及车辆所具备的陀螺仪传感器的校正方法。
背景技术
近年来,组装有导航系统、防滑控制等车辆控制系统、自动驾驶系统等的车辆增多。在这些系统中,需要精度高地对车辆的姿态(方位)、车辆的姿态变化等进行推定。于是,在多数组装有这些系统的车辆中,采用了对车辆绕铅垂方向的轴的旋转方向(偏航方向)的角速度进行计测的陀螺仪传感器(例如参照下述的专利文献1。)。
现有技术文献
专利文献
专利文献1:日本特开2016-91412号公报
发明内容
发明所要解决的课题
例如,在车辆直行的状态、即在未产生偏航方向的角速度的状态下的陀螺仪传感器的计测值即零点有时会由于时间经过或温度变动、振动等环境条件而发生变动(变化)。这样,陀螺仪传感器的输出特性存在有时由于时间经过、环境条件而发生变动,从而有可能无法将计测精度维持得较高。
本发明鉴于所述以往的问题,而欲提供用于将陀螺仪传感器的计测精度维持得较高的陀螺仪传感器的校正方法。
用于解决课题的方案
本发明提供一种陀螺仪传感器的校正方法,其是具备对绕铅垂方向的轴产生的旋转方向的角速度进行计测的陀螺仪传感器的车辆的该陀螺仪传感器的校正方法,其中,
所述陀螺仪传感器的校正方法实施以下处理:
横向偏移量检测处理,其对车辆相对于在道路铺设的磁性标识器的横向偏移量进行检测;
方位推定处理,其在车辆通过铺设有至少两个磁性标识器的铺设部位时,利用将针对该至少两个磁性标识器的所述横向偏移量检测处理检测到的横向偏移量作为输入值的运算处理来推定车辆的方位;以及
校正处理,其利用由该方位推定处理推定出的车辆的方位来对陀螺仪传感器进行校正。
发明效果
本发明的陀螺仪传感器的校正方法是利用在道路铺设的磁性标识器对车辆的方位进行检测,并在陀螺仪传感器的校正中利用的方法。与陀螺仪传感器不同,对于利用在道路铺设的磁性标识器来检测的车辆的方位而言,受到时间经过、温度变化等的影响的可能较小。因此,如果对利用磁性标识器来检出的车辆的方位进行利用,则能够可靠性高地对陀螺仪传感器进行校正。
附图说明
图1是实施例1中的安装有计测单元的车辆的主视图。
图2是实施例1中的示出标识器系统的结构的说明图。
图3是实施例1中的磁性标识器的说明图。
图4是实施例1中的示出磁性标识器的铺设方案的说明图。
图5是实施例1中的RFID标签的主视图。
图6是实施例1中的对通过磁性标识器时的行进方向的磁计测值的变化进行例示的说明图。
图7是实施例1中的对沿车宽方向排列的磁传感器Cn的车宽方向的磁计测值的分布进行例示的说明图。
图8是实施例1中的示出车辆的整体动作的流程的流程图。
图9是实施例1中的由标识器系统进行的本车位置的确定方法的说明图。
图10是实施例1中的示出本车位置相对于行驶路线的偏差ΔD的说明图。
图11是实施例1中的用于对陀螺仪传感器的校正方法进行说明的流程图。
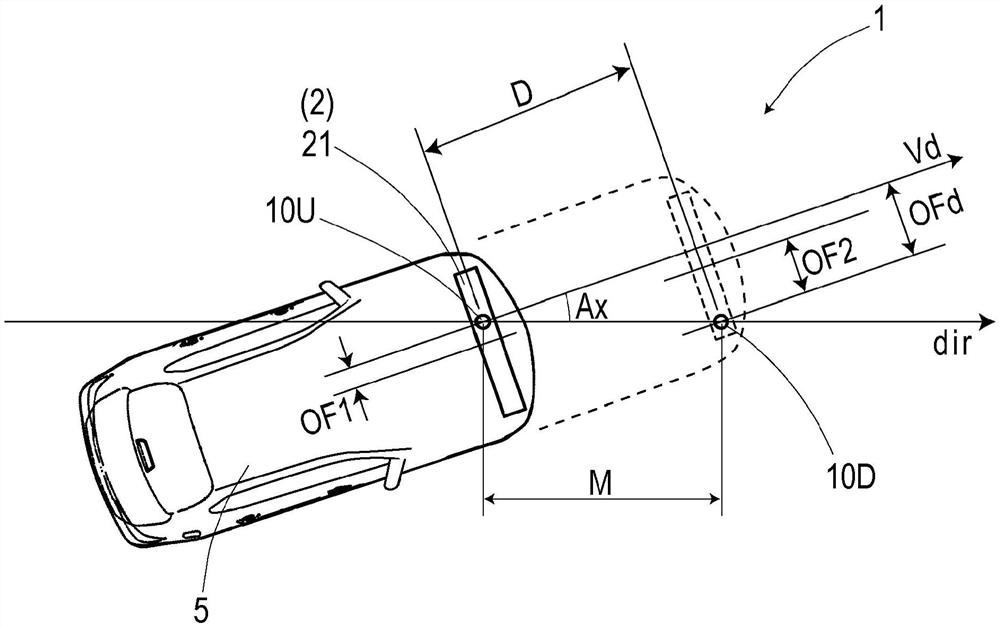
图12是实施例1中的车辆方位Vd的检测方法的说明图。
图13是实施例2中的车辆方位Vd的检测方法的说明图。
图14是实施例3中的用于对陀螺仪传感器的校正方法进行说明的流程图。
具体实施方式
利用以下的实施例来对本发明的实施方式具体地进行说明。
(实施例1)
本例是将高精度地对本车位置(车辆的位置)进行确定的标识器系统1组合于自动驾驶系统6的例子。特别地,本例的标识器系统1在具有利用磁性标识器10来校正陀螺仪传感器的功能这方面具有技术特征之一。根据该标识器系统1,能够将惯性导航的精度维持得较高。利用图1~图12对该内容进行说明。
如图1以及图2那样,标识器系统1构成为包括:计测单元2,其进行磁检测等;标签读取器34,其作为取得表示磁性标识器10的铺设位置的标识器信息的位置信息取得部的一例;以及控制单元32,其形成执行用于确定本车位置的运算处理的测位部。
组合有该标识器系统1的自动驾驶系统6(图2)构成为包括:车辆ECU61,其执行自动驾驶控制;以及地图数据库(地图DB)65,其保存详细的三维地图数据(3D地图数据)。车辆ECU61将标识器系统1所确定的本车位置作为控制输入值,而对未图示的方向盘转向单元、发动机节气门、制动器等进行控制,以使车辆5自动行驶。需要说明的是,在图1中省略了自动驾驶系统6的图示。
以下,在概要性地说明了铺设于道路的磁性标识器10之后,说明计测单元2、标签读取器34、控制单元32的内容。
如图3以及图4那样,磁性标识器10是在车辆5行驶的道路的路面100S铺设的道路标识器。磁性标识器10形成直径20mm、高度28mm的柱状。磁性标识器10以收容在设置于路面100S的孔内的状态进行铺设。形成磁性标识器10的磁铁为使作为磁性材料的氧化铁的磁粉分散在作为基材的高分子材料中而形成的铁氧体塑料磁体。该磁铁具备最大能积(BHmax)=6.4kJ/m
在表1中示出了本例的磁性标识器10的规格的一部分。
[表1]
磁性标识器10在作为计测单元2的安装高度而设想的范围100~250mm的上限的250mm高度处,作用有8μT(微特斯拉)的磁通密度的磁。另外,在该磁性标识器10中,表示表面处的磁强度的表面磁通密度Gs为45mT。
如图4那样,在标识器系统1中,沿着根据左右的车道标识而区分出的车道100的中央例如以10m间隔设置有磁性标识器10的铺设部位10F。在各铺设部位10F,沿着沿车道100的中央的方向(道路的方向)以2m间隔配置有两个磁性标识器10U、10D。以下,将磁性标识器10U、10D的2m的间隔称为标识器跨度M。另外,将连结两个磁性标识器10U、10D的线段的方向称为方位dir。利用标识器系统1,能够以该方位dir为基准来确定车辆方位(车辆的方位),能够对陀螺仪传感器223进行校正,详细情况在后叙述。
配置于各铺设部位10F的两个磁性标识器10U、10D中的、道路的相当于与行进方向相反一侧的上游侧的磁性标识器10U用于确定车辆位置。在该上游侧的磁性标识器10U附设有以无线的方式输出信息的无线标签即RFID(Radio Frequency IDentification)标签15(参照图3。)。
RFID标签15通过以无线的方式进行的外部供电而进行动作,以发送与磁性标识器10U有关的标识器信息。在标识器信息中包括表示对应的磁性标识器10U的铺设位置的位置数据、表示方位dir(图4)的方位数据(能够确定方位dir的标识器方位信息的一例)等。需要说明的是,配置于铺设部位10F的两个磁性标识器10中的、位于下游侧的磁性标识器10D为决定方位dir的磁性标识器,且未附设RFID标签15。
在此,如上所述,磁性标识器10的磁铁是使氧化铁的磁粉分散于高分子材料中而得到的。对于该磁铁而言,导电性较低,且难以在无线供电时产生涡电流等。因此,附设于磁性标识器10的RFID标签15能够高效地接收无线传送来的电力。
形成信息提供部的一例的RFID标签15例如是在从PET(Polyethyleneterephthalate)膜中切出的标签片150(图5)的表面装配有IC芯片157的电子部件。在标签片150的表面设置有环形线圈151以及天线153的印刷图案。环形线圈151是通过来自外部的电磁感应而产生励磁电流的受电线圈。天线153是用于无线发送标识器信息的发送天线。RFID标签15配置于磁性标识器10U的路面100S侧的表面。
接下来,对车辆5所具备的计测单元2、标签读取器34、控制单元32进行说明。
如图1以及图2那样,计测单元2是作为磁检测部的传感器阵列21与作为相对位置推定部的一例的IMU(Inertial Measurement Unit)22一体化而得到的单元。形成细长棒状的计测单元2以与路面100S面对的状态安装在例如前保险杠的内侧等。在本例的车辆5的情况下,以路面100S为基准的计测单元2的安装高度为200mm。
计测单元2的传感器阵列21具备在一条直线上排列的15个磁传感器Cn(n为1~15的整数)和内置有未图示的CPU等的检测处理电路212。需要说明的是,在传感器阵列21中,15个磁传感器Cn以10cm的等间隔配置。计测单元2以使传感器阵列21中的磁传感器Cn的排列方向与车宽方向一致的方式安装于车辆5。
磁传感器Cn是利用非晶丝等磁敏体的阻抗根据外部磁场而敏感地变化这一公知的MI效果(Magneto Impedance Effect)对磁进行检测的传感器。在磁传感器Cn中,非晶丝等未图示的磁敏体沿着正交的双轴方向配置,由此能够检测在正交的双轴方向上作用的磁。需要说明的是,在本例中,磁传感器Cn以能够检测行进方向以及车宽方向的磁分量的方式组装于传感器阵列21。
磁传感器Cn是磁通密度的测定范围为±0.6mT且测定范围内的磁通分辨率为0.02μT这样的高灵敏度的传感器。在本例中,将由计测单元2的各磁传感器Cn进行的磁计测的周期设定为3kHz,以与车辆5的高速行驶对应。
在表2中示出了磁传感器Cn的规格的一部分。
[表2]
如上所述,磁性标识器10能够在作为磁传感器Cn的安装高度而设想的范围100~250mm内作用8μT以上磁通密度的磁。作用磁通密度8μT以上的磁的磁性标识器10能够使用磁通分辨率为0.02μT的磁传感器Cn而可靠性高地检测到。
传感器阵列21的检测处理电路212(图2)是执行用于检测磁性标识器10的标识器检测处理等的运算电路。该检测处理电路212除了利用执行各种运算的CPU(centralprocessing unit)之外,还利用ROM(read only memory)、RAM(random access memory)等存储器元件等而构成。
检测处理电路212以3kHz周期取得各磁传感器Cn输出的传感器信号并执行标识器检测处理。然后,将标识器检测处理的检测结果向控制单元32输入。在该标识器检测处理中,除了进行磁性标识器10的检测之外,还进行计测车辆5相对于检测到的磁性标识器10的横向偏移量的横向偏移量检测处理,详细情况在后叙述。
组装于计测单元2的IMU22(图2)是利用惯性导航来推定车辆5的相对位置的惯性导航单元。IMU22具备对方位进行计测的电子罗盘即磁传感器221、对加速度进行计测的加速度传感器222以及对角速度进行计测的陀螺仪传感器223。陀螺仪传感器223安装于车辆5,并对车辆5绕铅垂方向的轴的旋转方向的角速度进行计测。如果将陀螺仪传感器223所计测出的角速度与磁传感器221所计测的方位组合,则能够高精度地推定车辆5的方位。
IMU22通过利用加速度的二阶积分对位移量进行运算,并沿着车辆5的方位累计位移量,从而对相对于基准位置的相对位置进行运算。如果利用IMU22所推定的相对位置,则在车辆5位于相邻的磁性标识器10U的中间时,也能够推定本车位置。
所述标签读取器34是以无线的方式与在磁性标识器10U的表面配置的RFID标签15进行通信的通信单元。标签读取器34以无线的方式输送RFID标签15的动作所需要的电力,并接收RFID标签15发送的标识器信息。如上所述,作为标识器信息,存在表示对应的磁性标识器10U的铺设位置(绝对位置)的位置数据、表示将铺设部位10F处的磁性标识器10U、10D连结的线段的方位dir的方位数据等。
所述控制单元32是控制计测单元2、标签读取器34并且即时地确定车辆5的位置即本车位置的单元。控制单元32将本车位置向构成车辆5的自动驾驶系统6的车辆ECU61输入。
控制单元32具备装配有执行各种运算的CPU、ROM、RAM等存储器元件等的电子基板(省略图示)。控制单元32确定本车位置的方法在车辆5到达附设有RFID标签15的磁性标识器10U时与车辆5位于相邻的磁性标识器10U的中间时不同。控制单元32在前者的情况下,利用从附设于磁性标识器10U的RFID标签15接收到的标识器信息来确定本车位置,详细情况在后叙述。另一方面,控制单元32在后者的情况下,基于利用惯性导航推定出的车辆5的相对位置来确定本车位置。
接下来,在说明了本例的(1)由标识器系统1进行的标识器检测处理以及(2)包括标识器系统1在内的车辆5的整体动作的流程之后,对(3)陀螺仪传感器223的校正方法进行说明。
(1)标识器检测处理
标识器检测处理是计测单元2的传感器阵列21所执行的处理。如上所述,传感器阵列21利用磁传感器Cn以3kHz的周期执行标识器检测处理。
如上述那样,磁传感器Cn构成为对车辆5的行进方向以及车宽方向的磁分量进行计测。例如,在该磁传感器Cn沿行进方向移动并通过磁性标识器10的正上方时,行进方向的磁计测值如图6那样,以在磁性标识器10的前后正负反转,并且在磁性标识器10的正上方的位置与零交叉的方式变化。因此,在车辆5的行驶中,在对于任一个磁传感器Cn所检测的行进方向的磁计测值而言,产生了其正负发生反转的零交叉Zc时,可以判断为计测单元2位于磁性标识器10的正上方。检测处理电路212在像这样计测单元2位于磁性标识器10的正上方且产生了行进方向的磁计测值的零交叉时判断为检测到了磁性标识器10。
另外,例如,对于与磁传感器Cn相同规格的磁传感器,在设想沿着通过磁性标识器10的正上方的车宽方向的假想线移动时,车宽方向的磁计测值以在隔着磁性标识器10的两侧正负发生反转,并且在磁性标识器10的正上方的位置与零交叉的方式变化。在将15个磁传感器Cn沿车宽方向排列而得到的计测单元2的情况下,根据隔着磁性标识器10而处于哪一侧,磁传感器Cn所检测的车宽方向的磁计测值的正负不同(图7)。
图7是示出计测单元2的各磁传感器Cn的车宽方向的磁计测值的分布的图。如果基于该图的分布,则隔着车宽方向的磁计测值的正负发生反转的零交叉Zc而相邻的两个磁传感器Cn的中间的位置、或检测到的车宽方向的磁为零且两外侧的磁传感器Cn的磁计测值的正负发生反转的磁传感器Cn的正下方的位置成为磁性标识器10的车宽方向的位置。检测处理电路212将磁性标识器10的车宽方向的位置相对于计测单元2的中央的位置(磁传感器C8的位置)的偏差作为上述的横向偏移量进行计测(横向偏移量检测处理)。例如,如果在图7的情况下,零交叉Zc的位置成为和C9与C10的中间附近的C9.5相当的位置。如上所述,磁传感器C9与C10的间隔为10cm,因此磁性标识器10的横向偏移量以在车宽方向上位于计测单元2的中央的C8为基准而为(9.5-8)×10cm。
(2)车辆的整体动作
接下来,参照图8~图10,对具备标识器系统1和自动驾驶系统6的车辆5的整体动作进行说明。
当在自动驾驶系统6中对行驶路线进行设定时(S101),自动驾驶系统6的车辆ECU61从存储3D地图数据的地图DB65中读出对应的数据,并对成为自动驾驶的控制目标的详细路线数据进行设定(S102)。路线数据例如像图9中的虚线所示的那样为至少包括由绝对位置的数据表示的一系列的地点在内的数据。
另一方面,在车辆5以自动驾驶进行行驶的控制模式下,标识器系统1的控制单元32反复执行由上述的传感器阵列21进行的标识器检测处理(S201)。在能够检测到位于任一铺设部位10F的上游侧的磁性标识器10U时(S202:是),控制单元32控制标签读取器34,以接收RFID标签15所输出的标识器信息(S223)。然后,控制单元32将以在标识器信息中包含的位置数据所表示的磁性标识器10U的铺设位置为基准,偏移了与在标识器检测处理中计测单元2所计测出的横向偏移量相应的量的位置确定为本车位置(由图9中的Δ印例示)(S204)。
需要说明的是,对于由传感器阵列21检测到的磁性标识器10是铺设位置的上游侧的磁性标识器10U还是下游侧的磁性标识器10D的判定,只要利用距带有接收到上次位置数据(标识器信息)的RFID标签15的磁性标识器10U的铺设位置的距离等进行判定即可。
另一方面,在车辆5位于相邻的磁性标识器10U的中间而不能检测到磁性标识器10U时(S202:否),组装于计测单元2的IMU22以基于在最近检测到的磁性标识器10U的铺设位置而确定的本车位置(图9中的Δ印的位置)为基准位置,利用惯性导航来推定车辆5的相对位置。具体而言,如上所述,IMU22利用计测加速度的二阶积分对位移量进行运算。然后,IMU22通过沿着由陀螺仪传感器223检测到的车辆5的行进方向变化、计测方位而对该位移量进行累计,从而推定车辆5相对于上述的基准位置的相对位置。如图9所例示的那样,控制单元32将从基准位置起移动该相对位置的量而得到的×印的位置确定为本车位置。需要说明的是,在图9中,由箭头示出了表示该相对位置的矢量的一例。
标识器系统1所确定的本车位置(图9中的Δ印以及×印的位置)被向自动驾驶系统6的车辆ECU61输入。车辆ECU61对在图10中虚线所示的控制目标值相对于路线数据的偏差ΔD进行计算(S103)。车辆ECU61基于该偏差ΔD来执行方向盘控制、节气门控制等车辆控制(S104),从而实现自动行驶。
(3)陀螺仪传感器的校正方法
如上述那样,在本例的标识器系统1中,在磁性标识器10的各铺设部位10F以标识器跨度M=2m的间隔配置有两个磁性标识器10U、10D(参照图4。)。将两个磁性标识器10U、10D连结的线段的方位dir与沿着车道100的中央的方向、即道路的方向一致。在铺设部位10F的上游侧的磁性标识器10U附设的RFID标签15对表示该方位dir的方位数据(标识器信息)进行输出(无线发送)。
利用标识器系统1,能够在各铺设部位10F,以方位di
在车辆5为行驶中的状态下,控制单元32通过对传感器阵列21进行控制,而反复执行包含横向偏移量检测处理在内的标识器检测处理P1(S301:否)。在车辆5达到第一处铺设部位10F并检测到上游侧的磁性标识器10U时(S301:是),控制单元32通过对标签读取器34进行控制来执行RFID标签15所存储的标识器信息的读取(S302)。
另外,控制单元32对传感器阵列21进行控制而再次开始标识器检测处理P1。控制单元32直至检出下游侧的磁性标识器10D为止,反复执行标识器检测处理P1(S303:否)。然后,在检测到下游侧的磁性标识器10D时(S303:是),控制单元32利用由标识器检测处理P1对于磁性标识器10U、10D分别计测出的横向偏移量OF1、OF2(图12)来对车辆方位Vd进行运算(S304、方位推定处理)。以下,将在第一处铺设部位10F运算出的车辆方位设为Vd(1),将与第二处铺设部位10F对应的车辆方位设为Vd(2)。
具体而言,如图12那样,控制单元32基于相对于两个磁性标识器10U、10D的横向偏移量OF1、OF2,而按照下式对车辆方位(行进方向)Vd相对于方位dir的偏移角Ax进行运算。在此,方位dir是在标识器信息中包含的方位数据所表示的绝对方位。车辆方位Vd可以被确定成:以方位dir为基准在偏航方向(绕铅垂方向的轴的旋转方向)上偏移了偏移角Ax的量的方位。
横向偏移量的变化OFd=|OF2-OF1|
偏移角Ax=arcsin(OFd/M)
在此,横向偏移量OF1、OF2被定义成以车辆5的宽度方向中央为界而成为正或者负的值。
另外,控制单元32根据第一处铺设部位10F的下游侧的磁传感器10D的检出,而开始陀螺仪传感器223的计测值即角速度在时间上的积分处理(S305、积分处理)。需要说明的是,该积分处理是用于求出在通过两处铺设部位10F期间的偏航方向的旋转角即计测旋转角的运算处理。控制单元32持续进行该积分处理,直至检出第二处铺设部位10F的下游侧的磁性标识器10D为止。
在通过了第一处铺设部位10F之后,控制单元32对传感器阵列21进行控制而再次开始标识器检测处理P1。该标识器检测处理P1被反复执行直至检出第二处铺设部位10F的磁性标识器10为止(S306:否)。
在检测到位于第二处铺设部位10F的上游侧的磁性标识器10U时(S306:是),控制单元32通过对标签读取器34进行控制而执行来自RFID标签15的标识器信息的读取(S307)。另外,控制单元32通过对传感器阵列21进行控制而反复执行标识器检测处理P1,以能够对下游侧的磁性标识器10D进行检测(S308:否)。然后,在能够检测到位于铺设部位10F的下游侧的磁性标识器10D时(S308:是),控制单元32与上述同样地基于相对于两个磁性标识器10U、10D的横向偏移量OF1、OF2(图12)来对车辆方位Vd(2)进行运算(S309、方位推定处理)。
控制单元32将车辆5在任意两处铺设部位10F进行运算而确定的车辆方位Vd(1)、Vd(2)的差分(车辆方位的变化量)作为车辆旋转角来计算(S310、差分运算处理)。另外,控制单元32结束陀螺仪传感器223所计测出的角速度在时间上的积分处理,并对该积分值即计测旋转角(旋转角)进行运算(S311、积分处理)。然后,控制单元32对车辆旋转角与计测旋转角进行比较(S312),而实施陀螺仪传感器223的校正处理P2。
在此,对陀螺仪传感器223的校正处理P2的内容进行说明。如果偏航方向的旋转为零(零点),则理想上,陀螺仪传感器223所计测的角速度应为零(deg/秒)。然而,陀螺仪传感器223的零点有时会由于随时间变化、温度变化等的影响而偏移,在零点处,陀螺仪传感器223所输出的角速度不为零的情况较多。该零点的偏移量作为对角速度在时间上进行积分时的积分常量而显著化。于是,也可以通过找到使上述的车辆旋转角与计测旋转角之间的差分接近零(差分减小)那样的积分常量,来确定零点的偏移量。在能够确定零点的偏移量的情况下,对于陀螺仪传感器223所输出的计测值(角速度)而言,使计测值一律以能够抵消其偏移量的方式偏移较佳。如果像这样对陀螺仪传感器223进行校正,则能够提升陀螺仪传感器223所输出的角速度的精度。例如,也可以将对上述的车辆旋转角与计测旋转角之间的差分除以积分区间(积分次数)而得到的值处理为零点的偏移量。
而且,如果基于图12中的偏移角Ax,则能够计算车辆5通过标识器跨度M的两个磁性标识器10所需要的移动距离D,从而能够高精度地计算车速。在此,将检测到上游侧的磁性标识器10U的时机设为t1,将检测到下游侧的磁性标识器10D的时机设为t2。
移动距离D=M×cosAx
车速V=D/(t2-t1)
如果利用根据通过两个磁性标识器10而如上述那样进行运算的车速V,则能够确定对由IMU22得出的计测加速度进行积分而求出的速度(车速)的误差。并且,如果能够像这样确定车速的误差,则能够进行对加速度进行计测的加速度传感器222的校正。
如以上所述,本例的标识器系统1利用磁性标识器10来确定本车位置的系统。在该标识器系统1中,没有以GPS电波等的接收为前提,因此,即使是例如隧道、楼宇间等GPS电波不能接收或不稳定的场所,位置精度也不会变得不稳定。根据标识器系统1,能够不依托环境地实现精度高的驾驶辅助控制。
在该标识器系统1中,需要将实现惯性导航的IMU22的精度维持得较高,以能够高精度地确定车辆位置。特别是对于陀螺仪传感器223、加速度传感器222等传感器而言,其计测值可能会根据随时间变化、温度变化等而变化,因此需要随时恰当地进行校正。
在本例的标识器系统1中,能够利用在道路铺设的磁性标识器10来进行陀螺仪传感器223、加速度传感器222等的校正。如果利用在道路的路面100S固定且方位dir已知的两个磁性标识器10U、10D,则能够高精度地确定偏航方向的车辆方位Vd。如果基于以高精度进行了确定的车辆方位Vd,则能够可靠性高地对计测偏航方向的角速度的陀螺仪传感器223进行校正。
而且,如果利用在铺设部位10F隔开2m的标识器跨度M的间隔配置的两个磁性标识器10U、10D,则能够高精度地确定车速V。如果利用精度高的车速V,则能够校正对加速度进行计测的加速度传感器222,该加速度作为用于对通过二阶积分求出的车速进行运算的原始数据。
需要说明的是,本例的校正方法以在通过铺设部位10F时,转向角的变化足够小为前提。也可以是,当在通过铺设部位10F时进行突然的方向盘操作而转向角发生了变化的情况下,取消陀螺仪传感器223的校正处理P2。
在本例中,示出了附设于磁性标识器10U的RFID标签15发送包含位置数据、方位数据在内的标识器信息的结构例。也可以代替于此,而采用能够利用RFID标签15所发送的标签ID进行参照的标识器数据库。在标识器数据库中,将表示铺设部位10F的两个磁性标识器10U、10D中的至少任一个铺设位置的位置数据、表示连结两个磁性标识器10U、10D的线段的绝对方位dir的方位数据等与标签ID关联来记录较佳。如果利用标签ID对标识器数据库进行参照,则能够取得对应的磁性标识器10的铺设位置、将其铺设部位10F中的两个磁性标识器10U、10D连结的绝对方位dir。标识器数据库既可以设置于能够与车辆5通信的服务器装置,也可以设置于车辆5的存储区域。
在本例中示出了在各铺设部位10F分别配置有两个磁性标识器10的结构例,但也可以呈直线地配置三个以上的磁性标识器10。
也可以代替将两个磁性标识器10沿着道路的方向配置的本例的结构,而将多个磁性标识器10沿着南北方向、东西方向等基准方向配置。在如图12那样确定车辆方位时,如果将两个磁性标识器10连结的方位dir相对于车辆方位Vd接近直角,则存在横向偏移量的计测变难,且车辆方位Vd的运算精度降低的倾向。于是,也可以将三个磁性标识器10配置为L字状,以能够选择在车辆方位Vd的运算中利用的磁性标识器10的配置方向。使L字状的纵向的线、横向的线分别与南北、东西的方向一致较佳。
也可以构成为,沿南北的方向、东西的方向中的、相对于道路的方向接近平行的一侧的方向来配置磁性标识器10,另一方面,能够根据磁极性来对该方向是哪个方向的区别进行识别。例如,对于两个磁性标识器10的磁极性,也可以使得N极-N极表示南北的方向,S极-S极表示东西的方向。
(实施例2)
本例是基于实施例1对车辆方位Vd的确定方法进行了变更的标识器系统1的例子。本例在关于在车辆5的前后隔开2m的间隔来配置传感器阵列21这点上与实施例1不同。并且,由于这样的传感器阵列21的配置的不同,从而车辆方位Vd的确定方法与实施例1不同。参照图13对该内容进行说明。需要说明的是,还适当参照在实施例1的说明中使用的图2~图4。
如图13那样,在本例的标识器系统1中,车辆5中的传感器阵列21的配置间隔(传感器跨度S)与铺设部位10F处的磁性标识器10的配置间隔(标识器跨度M)一致。因此,在车辆5通过铺设部位10F时,前后的传感器阵列21能够在大致同时检出两个磁性标识器10U、10D。
在本例中,基于前后的传感器阵列21相对于磁性标识器10U、10D计测出的横向偏移量OF1、OF2,来对车辆方位Vd进行运算。具体而言,车辆方位(行进方向)相对于将两个磁性标识器10U、10D连结的线段的方位dir的偏移角Ax能够按照下式进行运算。并且,车辆方位Vd可以被确定为以方位dir为基准在偏航方向上偏移了偏移角Ax的量的方位。
横向偏移量的变化OFd=|OF2-OF1|
偏移角Ax=arcsin(OFd/M)
在采用这样的车辆方位Vd的确定方法的情况下,不需要车辆5的移动(时间的经过),因此产生由于方向盘操作而造成的误差的可能性小。
需要说明的是,对于其他的结构以及作用效果,其与实施例1相同。
(实施例3)
本例是基于实施例1的结构对陀螺仪传感器223的校正处理的内容进行了变更的例子。参照图14对该内容进行说明。需要说明的是,还适当参照在实施例1的说明中使用的图2~图4。
本例的陀螺仪传感器223的校正处理仅能够在例如坡度的变化小于0.01%且曲率半径为3000m以上的平坦的直线的道路设置的铺设部位10F执行。在设置于在该铺设部位10F配置的上游侧的磁性标识器10U的RFID标签15发送的标识器信息中,除了包含与实施例1相同的位置数据、方位数据之外,还包含是上述的平坦的直线道路且能够执行本例的校正处理的意思的信息。
在此,参照图14的流程图,对由本例的标识器系统1进行的陀螺仪传感器的校正处理的流程进行说明。
车辆5在行驶中的状态下,车辆5所具备的控制单元32通过对传感器阵列21进行控制而反复执行标识器检测处理P1(S401:否)。当检测到铺设部位10F的上游侧的磁性标识器10U时(S401:是),控制单元32通过对标签读取器34进行控制,而执行来自RFID标签15的标识器信息的读取(S402)。然后,控制单元32判断在标识器信息中是否包含能够执行校正处理的意思的信息(S403)。
当在标识器信息中包含了能够执行校正处理的意思的信息的情况下(S403:是),控制单元32通过对传感器阵列21进行控制而再次开始标识器检测处理P1,以使得能够检出在下游侧相邻的磁性标识器10D。在检测到磁性标识器10D的情况下(S404:是),控制单元32对相对于磁性标识器10U、10D的横向偏移量的差分值进行运算(S405)。
控制单元32在横向偏移量的差分值为规定阈值(例如5cm等。)以下的情况下(S406:是),判断为车辆5的方位相对于直线的道路的方向的偏移角(相当于图12中的Ax。)足够小的直行状态。然后,在判断为车辆5处于直线状态时,实施陀螺仪传感器223的校正处理P2。在该校正处理P2中,以使陀螺仪传感器223的计测值即角速度为零的方式进行陀螺仪传感器223的校正。
另一方面,当在RFID标签15输出的标识器信息中未包含能够校正的意思的信息的情况下(S403:否)、相对于磁性标识器10U、10D的横向偏移量的差分值超过了规定阈值的情况下(S406:否)等,取消陀螺仪传感器223的校正处理P2。
在本例的标识器系统1中,是在RFID标签15输出的标识器信息中包含能够执行校正处理的意思的信息的例子。也可以是,代替于此或在此基础上,对于能够执行校正处理的铺设部位,使其磁性标识器10的配置个数为三个等,而与其他铺设部位不同。在该情况下,即使是未铺设带有RFID标签15的磁性标识器10的铺设部位,也能够进行陀螺仪传感器223的校正。
需要说明的是,对于上述的偏移角,也可以通过利用在实施例1中示出的偏移角Ax的式子进行的运算来求出。在该情况下,执行与偏移角有关的阈值判断较佳。
需要说明的是,对于其他的结构以及作用效果,其与实施例1相同。
以上,如实施例那样,详细说明了本发明的具体例,但这些具体例只不过公开了专利技术方案所包含的技术的一例。不言而喻的是,不应根据具体例的结构、数值等来限定性地解释专利技术方案。专利技术方案包含利用公知技术、本领域技术人员的知识等而以多种方式对所述具体例进行变形、变更或适当组合而得到的技术。
附图标记说明
1 标识器系统
10 磁性标识器
15 RFID标签(信息提供部、无线标签)
2 计测单元
21 传感器阵列(磁检测部)
212 检测处理电路
22 IMU
222 加速度传感器
223 陀螺仪传感器
32 控制单元
34 标签读取器
5 车辆
6 自动驾驶系统
61 车辆ECU
65 地图数据库(地图DB)。