一种水下机器人用可升降伸缩托架
文献发布时间:2023-06-19 09:44:49
技术领域
本发明属于水下机器人技术领域,特别涉及一种水下机器人用可升降伸缩托架。
背景技术
回转体构型的水下机器人多采用分段连接结构,各段可采用耐压壳体整体密封,也可采用外部浮力材填充、内部龙骨框架支撑的透水结构,各段之间通过螺钉连接,一般外径越大,各段的重量相对越重,两段相互装配时需借助吊车将舱段吊起对准安装,单人无法操作。
另外,水下机器人在陆上调试阶段需频繁移动,在不便于使用吊车的码头或母船上,快速完成各段拆分调试和换装就尤为困难,因此需设计一种环境适应性较强的装置,便于回转体构型的水下机器人各段拆装工作。
发明内容
针对上述问题,本发明的目的在于提供一种水下机器人用可升降伸缩托架,便于回转体构型的水下机器人各段拆装,以提高效率,解放人力。
为了实现上述目的,本发明采用以下技术方案:
一种水下机器人用可升降伸缩托架,包括滑动配合的内托架和外托架;所述内托架包括内托架框架、内托架支撑组件、内托架升降机构及内托架万向轮,其中内托架支撑组件可沿竖直方向滑动地设置于内托架框架的顶部;所述内托架升降机构设置于所述内托架框架的底部,并且输出端与所述内托架支撑组件连接;所述内托架万向轮设置于所述内托架框架的底部,所述内托架框架与所述外托架滑动配合。
所述内托架框架为方形结构,其顶部两侧设有内托架上支撑板,底部设有内托架下支撑板;所述内托架支撑组件的底部通过两个内托架导杆分别与两个所述内托架上支撑板滑动连接;所述内托架升降机构设置于所述内托架下支撑板上;所述内托架下支撑板的底部设有用于与所述外托架滑动配合的滑套。
所述内托架支撑组件包括内托架木托和内托架托槽,所述内托架木托嵌设于所述内托架托槽内,并且通过螺钉B与所述内托架托槽连接,所述内托架托槽的底部与两个所述内托架导杆连接。
所述内托架木托的中部设有缝隙。
所述内托架上支撑板上设有内托架垫块,所述内托架垫块位于所述内托架木托的下方。
所述外托架包括外托架框架、外托架支撑组件、外托架升降机构及外托架万向轮,其中外托架支撑组件可沿竖直方向滑动地设置于所述外托架框架的顶部,所述外托架升降机构设置于所述外托架框架的底部,并且输出端与所述外托架支撑组件连接,所述外托架框架的底部设有所述外托架万向轮。
所述外托架框架为方形结构,其顶部两侧设有外托架上支撑板,底部设有外托架下支撑板;所述外托架支撑组件通过两个外托架导杆分别与两个外托架上支撑板滑动连接;所述外托架升降机构设置于所述外托架下支撑板上。
所述外托架支撑板的上方设有导轨,所述导轨与所述滑套滑动配合;所述导轨的内侧端部设有限位块。
所述内托架下支撑板和所述外托架下支撑板之间设有定位锁紧机构,所述定位锁紧机构包括吊环螺母和螺钉A,所述螺钉A穿过所述内托架下支撑板和所述外托架下支撑板上设有的限位孔,并且通过吊环螺母锁紧。
所述外托架支撑组件包括外托架托槽和外托架木托,其中外托架木托嵌设于所述外托架托槽内,并且通过螺钉C与所述外托架托槽连接;所述外托架木托的顶部为圆弧面,可承载圆柱形舱段。
本发明的优点与积极效果为:
1.本发明具有较好的通用性,可用于回转体构型水下机器人舱段的的拆装,木托可更换成其它辅助支撑装置,实现多样化搭载。
2.本发明移动灵活,环境适应性强,不受场地限制,可在陆地和甲板等平地场所使用。
3.本发明解放人力,单人即可完成大型水下机器人各段的拆装维护,提高了现场使用效率,具有较强的可操作性。
附图说明
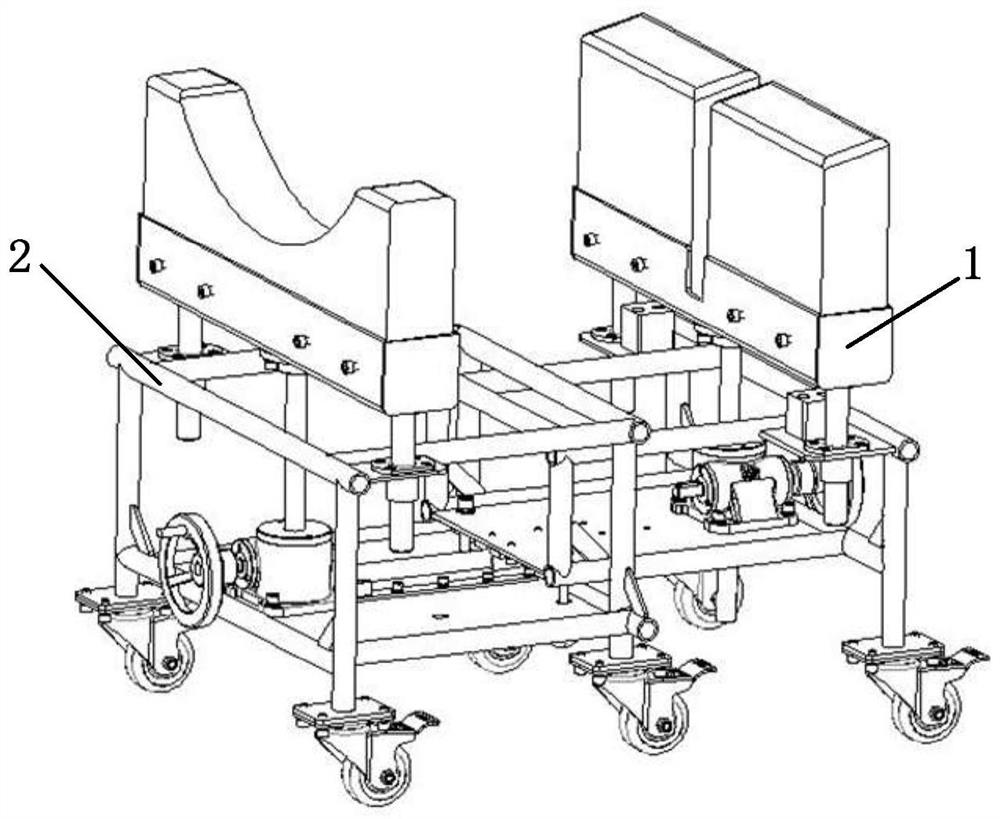
图1为本发明水下机器人用可升降伸缩托架的结构示意图;
图2为本发明中内托架的结构示意图;
图3为本发明中内托架框架的结构示意图;
图4为本发明中滑套的结构示意图;
图5为本发明中升降机构的结构示意图;
图6为本发明中外托架的结构示意图;
图7为图6的局部放大图;
图8为本发明中回转体构型水下机器人的结构示意图;
图9为本发明中升降伸缩托架搭载艏段的结构示意图;
图10为本发明中升降伸缩托架搭载舯段的结构示意图;
图11为本发明中升降伸缩托架搭载艉段的结构示意图。
其中:1为内托架,2为外托架,3为内托架木托,4为内托架托槽,5为内托架导杆,6为内托架导向套,7为内托架框架,8为内托架升降机构,9为内托架万向轮,10为滑套,11为吊环螺母,12为螺钉A,13为内托架垫块,14为螺钉B,15为内托架上支撑板,16为横管A,17为底板,18为横管B,19为加强筋,20为立管,21为内托架下支撑板,22为手轮,23为涡轮蜗杆机构,24为螺杆,25为限位孔,26为导轨,27为限位块,28为外托架下支撑板,29为外托架框架,30为外托架托槽,31为外托架木托,32为艏段,33为舯段A,34为舯段B,35为艉段,40为螺钉C,41为外托架导杆,42为外托架导向套,43为外托架上支撑板,44为外托架升降机构,45为外托架万向轮。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
如图1-2所示,本发明提供的一种水下机器人用可升降伸缩托架,包括滑动配合的内托架1和外托架2;内托架1包括内托架框架7、内托架支撑组件、内托架升降机构8及内托架万向轮9,其中内托架支撑组件可沿竖直方向滑动地设置于内托架框架7的顶部;内托架升降机构8设置于内托架框架7的底部,并且输出端与内托架支撑组件连接;内托架万向轮9设置于内托架框架7的底部,内托架框架7与外托架2滑动配合。
本实施例中,内托架框架7为方形结构,其顶部两侧设有内托架上支撑板15,底部设有内托架下支撑板21;内托架上支撑板15上设有内托架导向套6,内托架支撑组件的底部通过两个内托架导杆5分别与两个内托架导向套6滑动连接;内托架升降机构8设置于内托架下支撑板21的外侧端;内托架下支撑板21的底部设有用于与外托架2滑动配合的滑套10,如图4所示。
本实施例中,内托架支撑组件包括内托架木托3和内托架托槽4,内托架木托3嵌设于内托架托槽4内,并且通过螺钉B14与内托架托槽4连接,内托架托槽4的底部与两个内托架导杆5连接。
进一步地,内托架上支撑板15上设有内托架垫块13,内托架垫块13位于内托架木托3的下方,内托架木托3的中部设有缝隙。
如图3所示,本发明的实施例中,内托架框架7是由两根横管A16、五根横管B18和四根立管20焊接而成的方形框架,内托架下支撑板21与方形框架的底部焊接,加强筋19与下侧的横管B18和立管20焊接,内托架上支撑板15与上侧的横管B18焊接,底板17与较长的立管20焊接,内托架万向轮9与底板17连接。
如图5所示,本发明的实施例中,内托架升降机构8包括手轮22、涡轮蜗杆机构23和螺杆24,手轮22与蜗杆通过键连接,螺杆24与涡轮通过螺旋副连接,内托架支撑组件的内托架托槽4与螺杆24连接。
如图6-7所示,本发明的实施例中,外托架2包括外托架框架29、外托架支撑组件、外托架升降机构44及外托架万向轮45,其中外托架支撑组件可沿竖直方向滑动地设置于外托架框架29的顶部,外托架升降机构44设置于外托架框架29的底部,并且输出端与外托架支撑组件连接,外托架框架29的底部设有外托架万向轮45。
外托架框架29为方形结构,其顶部两侧设有外托架上支撑板43,底部设有外托架下支撑板28;外托架上支撑板43上设有外托架导向套42,外托架支撑组件通过两个外托架导杆41分别与两个外托架导向套42滑动连接;外托架升降机构44设置于外托架下支撑板28上。具体地,外托架升降机构44与内托架升降机构8结构相同,在此不再赘述。
外托架支撑板28的上方设有导轨26,导轨26与滑套10滑动配合;进一步地,导轨26的内侧端部设有限位块27。本实施例中,外托架框架29与内托架框架7结构相同,只是外托架框架29尺寸大于内托架框架7尺寸,内托架框架7沿导轨26滑动,可插设于外托架框架29内。
本实施例中,外托架支撑组件包括外托架托槽30和外托架木托31,其中外托架木托31嵌设于外托架托槽30内,并且通过螺钉C40与外托架托槽30连接;外托架木托31的顶部为圆弧面,可承载圆柱形舱段。
在上述实施例的基础上,内托架下支撑板21和外托架下支撑板28之间设有定位锁紧机构。具体地,定位锁紧机构包括吊环螺母11和螺钉A12,螺钉A12穿过内托架下支撑板21和外托架下支撑板28上设有的限位孔25,并且通过吊环螺母11锁紧。
当内托架1和外托架2的托槽落至最低点时,因外托架框架29高于内托架框架7,内托架垫块13支撑内托架托槽4使两托槽保持相同高度。
当内托架1缩进极限位置时,限位块27起限位作用。滑套10与导轨26通过滑动副连接,内托架框架7可在外托架框架29内一定范围内伸缩,外托架下支撑板28上有两个限位孔25,分别对应内托架1的最大和最小伸缩位置,螺钉A12穿过内托架支撑板21和外托架支撑板28的限位孔25,与吊环螺母11连接,夹紧两个支撑板,固定内托架1和外托架2的相对位置。内托架1装有两个内托架万向轮9,外托架2装有四个外托架万向轮9,托架中部的重力传递到滑套10与导轨26的滑动副,最终通过外托架2内侧的万向轮承载。
如图8所示,回转体构型的水下机器人多采用分段连接结构,一般包括艏段32、舯段A33、舯段B34和艉段35。整体一般为纺锤体外形,舯段为圆柱体外形,艉段35安装有舵板和螺旋桨。
如图9、图10和图11所示,对于外形为较规则的圆柱体舱段,两托架托槽内可安装内表面也是圆柱面的外托架木托31,对于艉段35的收紧流线外形,可将内托架木托3与其匹配,该木托顶部是带有一定倾角的平面,且其中部和内托架托槽4的中部都断开一定缝隙,可容纳艉段的垂直舵板,避免干涉。在本实施例中,两组托架配合使用,通过调节升降机构的高度,完成水下机器人各段对准连接。
本实施例中,升降机构8为市购产品,可根据水下机器人各段的重量选型。
本发明的工作原理为:
水下机器人用可升降伸缩托架分为内托架和外托架,主体框架为钢管和钢板焊接结构,底部安装万向轮,内托架可在外托架一定范围内伸缩,通过调节涡轮蜗杆升降机构实现木托的升降,进而调节水下机器人舱段的高度,在没有吊车或人力较少的情况下,可完成大型舱段的拆装,通过内外托架间的伸缩,可搭载一定长度范围内的舱段,适用于车间或码头等多种环境。
综上所述,本发明给出了给出了一种水下机器人用可升降伸缩托架,具有较好的通用性,可用于回转体构型水下机器人舱段的的拆装,提高了现场工作效率。
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
- 一种水下机器人用可升降伸缩托架
- 一种科考船用可调式水下机器人托架