一种搭载高光谱遥感系统的自校正一体化无人设备
文献发布时间:2023-06-19 09:46:20
技术领域
本发明涉及无人设备技术领域,具体为一种搭载高光谱遥感系统的自校正一体化无人设备。
背景技术
近年来无人机技术发展迅猛,各种小型无人机遥感系统层出不穷,目前也形成了包括色散分光型无人机成像光谱成像系统、可调谐滤光型无人机成像光谱系统、面阵连续快照型光谱成像系统。高光谱遥感因为其特有的图谱合一成像特点,给无人机高光谱遥感系统在同时保证光谱质量和几何精度带来了极大挑战,现有广泛使用的小型无人机平台由于搭载能力受限,光谱仪的视场小,对载荷系统具有更高的小型化和轻量化要求,信息获取能力差,时间分辨率低,不能满足迫切的大视场光谱仪应用需求,为此我们提出一种搭载高光谱遥感系统的自校正一体化无人设备用于解决上述问题。
发明内容
本发明的目的在于提供一种搭载高光谱遥感系统的自校正一体化无人设备,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种搭载高光谱遥感系统的自校正一体化无人设备,包括无人机本体,所述无人机本体的底部固定安装搭载架,所述搭载架底部通过螺栓安装装置箱,所述装置箱的内腔底部紧密卡接转盘,所述转盘的底部固定安装两个转动座,所述转动座转动贯穿装置箱的底部,所述转动座间转动套接转轴,所述转轴上固定套接安装块,所述安装块的底部固定安装高光谱监测机构,所述装置箱内安装调节机构。
优选的一种实施案例,所述装置箱的一侧安装有开合门,所述装置箱的内腔底部两侧固定安装限位块,两个所述限位块沿转盘的轴线对称分布,所述转盘的外壁固定安装限位杆,所述限位杆的长度大于转盘外壁到限位块的距离,对转盘的转动角度进行限位,所述转盘只能在180°范围内转动。
优选的一种实施案例,所述移动机构包括蜗轮,所述转轴的一端固定套接蜗轮,所述转盘的一侧开有转槽,所述蜗轮的顶部贯穿固定座和转槽,所述转槽两侧的转盘上均固定固定板,所述固定板间转动套接蜗杆,所述蜗杆啮合蜗轮的顶部,一个所述固定板的外壁上固定安装第一马达,所述第一马达的输出轴固定连接蜗杆的一端,所述装置箱的内腔顶部固定安装第二马达,所述第二马达的输出轴固定连接转盘的顶面中部。
优选的一种实施案例,所述第二马达的底部到转盘的间距大于固定板的高度,所述第二马达、转盘和固定座的轴线相重合。
优选的一种实施案例,所述高光谱监测机构包括机架,所述机架的顶部固定连接安装块,所述机架内腔从下往上通过光学支架和螺钉依次安装凹透镜一、凸透镜一、凸透镜二、滤波器、凹透镜二和传感器,所述滤波器和传感器均通过线路连接装置箱内的中央处理器。
优选的一种实施案例,所述滤波器为AOTF声光可调滤波器,所述传感器和滤波器的波段相同。
优选的一种实施案例,所述中央处理器包含射频信号处理模块;辐射校正处理模块,对高光谱数据进行辐射校正处理,包括噪声去除及反射率反演处理;和几何校正处理模块,对高光谱数据进行几何校正处理,提高数据的解译精度。
优选的一种实施案例,所述装置箱内安装有存储模块、GPS模块和无线通讯模块。
与现有技术相比,本发明的有益效果是:
1、第二马达86带动转盘5进行水平方向转动调节,第一马达85带动蜗杆84转动,蜗杆84带动蜗轮81转动,使得转轴6带动安装座7竖直转动,高光谱监测机构9能够进行全方位拍摄,增加视角,便于对无人机位置进行监测,便于遥控校正;
2、滤波器95对光学光线进行不同波段分光,将入射光线快速、高分辨率分光,速度快,精确度高,分辨率高,波长稳定性好,信噪比高,实现电子谱段全谱扫描;
3、传感器97将光信号转化为电信号,并通过中央处理器接受信号并转化图像,能够实时显示,根据需要进行特定波段的图像采集与传输;
4、本装置体积小巧,功耗低,装置箱3通过螺栓连接搭载架2,安装便捷,满足一体化设计。
附图说明
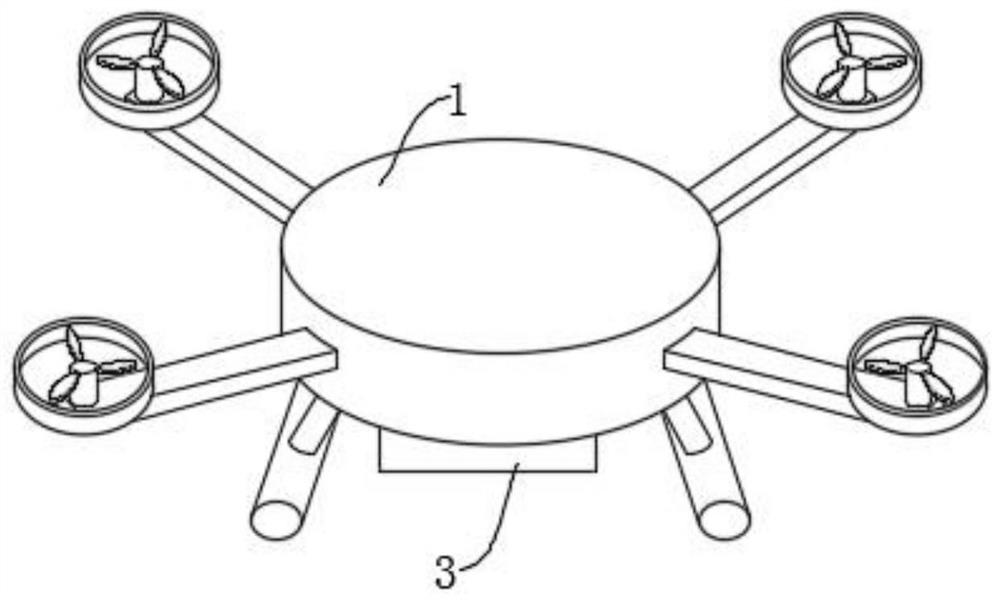
图1为本发明结构示意图;
图2为本发明中主视剖面结构示意图;
图3为本发明调节机构处结构爆炸图;
图4为本发明高光谱监测机构结构示意图。
图中:1无人机本体、2搭载架、3装置箱、4转动座、5转盘、6转轴、7安装块、8调节机构、81蜗轮、82转槽、83固定板、84蜗杆、85第一马达、86第二马达、9高光谱监测机构、91机架、92凹透镜一、93凸透镜一、94凸透镜二、95滤波器、96凹透镜二、97传感器、10限位块、11限位杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-4,本发明提供一种技术方案:一种搭载高光谱遥感系统的自校正一体化无人设备,包括无人机本体1,无人机本体1的底部固定安装搭载架2,搭载架2底部通过螺栓安装装置箱3,装置箱3的内腔底部紧密卡接转盘5,转盘5的底部固定安装两个转动座4,转动座4转动贯穿装置箱3的底部,转动座4间转动套接转轴6,转轴6上固定套接安装块7,安装块7的底部固定安装高光谱监测机构9,装置箱3内安装调节机构8。装置箱3通过螺栓连接搭载架2,实现一体化设计,安装便捷,通过调节机构8带动转盘5水平转动,转动座4水平转动调节高光谱监测机构9的水平拍摄方向,同时带动转轴6转动,转轴6带动安装座7竖直转动,从而调节高光谱监测机构9的俯仰角,增加视角,便于对无人机位置进行监测,便于遥控校正。
装置箱3的一侧安装有开合门,装置箱3的内腔底部两侧固定安装限位块10,两个限位块10沿转盘5的轴线对称分布,转盘5的外壁固定安装限位杆11,限位杆11的长度大于转盘5外壁到限位块10的距离,对转盘5的转动角度进行限位,转盘5只能在180°范围内转动,则转盘5带动高光谱监测机构9进行水平方向180°内调节,结合安装座7的竖直转动,使得高光谱监测机构9能够进行全方位拍摄。
移动机构8包括蜗轮81,转轴6的一端固定套接蜗轮81,转盘5的一侧开有转槽82,蜗轮81的顶部贯穿固定座4和转槽82,转槽82两侧的转盘5上均固定固定板83,固定板83间转动套接蜗杆84,蜗杆84啮合蜗轮81的顶部,一个固定板83的外壁上固定安装第一马达85,第一马达85的输出轴固定连接蜗杆84的一端,装置箱3的内腔顶部固定安装第二马达86,第二马达86的输出轴固定连接转盘5的顶面中部,第二马达86的底部到转盘5的间距大于固定板83的高度,第二马达86、转盘5和固定座4的轴线相重合,则第二马达86带动转盘5进行水平方向转动调节,第一马达85带动蜗杆84转动,蜗杆84带动蜗轮81转动,从而使得转轴6带动安装座7转动,实现高光谱监测机构9的竖直转动调节。
高光谱监测机构9包括机架91,机架91的顶部固定连接安装块7,机架91内腔从下往上通过光学支架和螺钉依次安装凹透镜一92、凸透镜一93、凸透镜二94、滤波器95、凹透镜二96和传感器97,滤波器95和传感器97均通过线路连接装置箱3内的中央处理器,滤波器95为AOTF声光可调滤波器,传感器97和滤波器95的波段相同,则通过凹透镜一92、凸透镜一93、凸透镜二94等现有光学镜头对地面进行拍摄监测的同时,滤波器95对光学光线进行不同波段分光,将入射光线快速、高分辨率分光,速度快,精确度高,分辨率高,波长稳定性好,信噪比高,实现电子谱段全谱扫描,便于传感器97将光信号转化为电信号,并通过中央处理器接受信号并转化图像。
中央处理器包含射频信号处理模块;辐射校正处理模块,对高光谱数据进行辐射校正处理,包括噪声去除及反射率反演处理;和几何校正处理模块,对高光谱数据进行几何校正处理,提高数据的解译精度。
装置箱3内安装有存储模块、GPS模块和无线通讯模块,便于存储数据以及遥感传输。
工作原理:本发明使用时,装置箱3通过螺栓连接搭载架2,实现一体化设计,安装便捷,第二马达86带动转盘5进行水平方向转动调节,并通过限位块10和限位杆11进行限位,使得转盘5只能在180°范围内转动,同时,第一马达85带动蜗杆84转动,蜗杆84带动蜗轮81转动,从而使得转轴6带动安装座7转动,结合水平转动调节,使得高光谱监测机构9能够进行全方位拍摄,增加视角,便于对无人机位置进行监测,便于遥控校正,高光谱监测机构9采用凹透镜一92、凸透镜一93、凸透镜二94等现有光学镜头对地面进行拍摄监测的同时,滤波器95对光学光线进行不同波段分光,将入射光线快速、高分辨率分光,速度快,精确度高,分辨率高,波长稳定性好,信噪比高,实现电子谱段全谱扫描,便于传感器97将光信号转化为电信号,并通过中央处理器接受信号并转化图像,能够实时显示,根据需要进行特定波段的图像采集与传输。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种搭载高光谱遥感系统的自校正一体化无人设备
- 一种新型自校正一体化无人机载高光谱遥感系统