一种公路隧道渗漏水自动修复机构、修复装置及方法
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及交通工程设备技术领域,具体涉及一种公路隧道渗漏水自动修复机构、修复装置及方法。
背景技术
这里的陈述仅提供与本发明相关的背景技术,而不必然地构成现有技术。
随着交通运输事业的迅猛发展,隧道结构作为跨越障碍物、节省地上空间、利用地下空间的一个重要结构已被广泛的应用,已经成为道路建设过程中最优先的选择之一。公路隧道衬砌渗漏水,是公路隧道中最常见的一种病害,伴随着隧道运营长期存在,对隧道的工程质量及运营时的交通安全造成严重的影响。如今运营中的隧道衬砌大多数存在渗漏水的情况,因此,对运营期公路隧道衬砌中的渗漏水区域进行修复很有必要。
发明人发现,目前在实际应用中,衬砌渗漏水的修复工作大多是人工修复,通过肉眼寻找渗漏水位置,手持灌浆机进行灌浆修复。这样的修复方法存在较多缺点,如人工修复需要大量熟练的技术人员,需要花费大量的时间和精力进行培训;肉眼观察可能导致遗漏细小的渗漏点,造成修复率降低,导致安全隐患;在隧道拱顶或其它较高部位的渗漏区域需要借助大型起重装置,占用大量空间,对隧道的交通通行功能有较大影响。因此,亟需一种修复效率高、操作简单的衬砌渗漏水区域修复装置。
发明内容
本发明的目的是为克服现有技术的不足,提供一种公路隧道渗漏水自动修复机构,修复效率高,操作简单,降低了工作人员的劳动强度。
为实现上述目的,本发明采用如下技术方案:
第一方面,本发明的实施例提供了一种公路隧道渗漏水自动修复机构,包括支撑件,支撑件安装有机械臂和摄像机构,机械臂首端与安装在支撑件的回转机构连接,机械臂末端通过转动件连接有转盘,转盘连接有打磨机构、钻孔机构及注浆机构,转动件能够带动转盘转动,带动打磨机构、钻孔机构及注浆机构在工作区域的切换。
结合第一方面,本发明的实施例提供了第一方面的一种可能实施方式,所述打磨机构采用角磨机,所述角磨机的外壳固定在转盘上。
结合第一方面,本发明的实施例提供了第一方面的一种可能实施方式,所述钻孔机构包括固定在转盘的钻孔驱动件,所述钻孔驱动件与第一伸缩件连接,能够带动第一伸缩件转动,所述第一伸缩件与钻头连接。
结合第一方面,本发明的实施例提供了第一方面的一种可能实施方式,所述注浆机构包括安装在转盘的浆液筒和注浆泵,所述浆液筒与注浆泵的进口端通过管路连接,注浆泵的出口端通过管路与灌浆针管连接,所述灌浆针管与第二伸缩件连接。
结合第一方面,本发明的实施例提供了第一方面的一种可能实施方式,所述注浆泵与灌浆针管管之间的管路设置有压力表,用于检测注浆压力。
结合第一方面,本发明的实施例提供了第一方面的一种可能实施方式,所述摄像机构包括相机,所述相机与俯仰驱动件连接,俯仰驱动件能够驱动相机转动,俯仰驱动件固定在支座上,支座固定在支撑件上,相机能够采集隧道衬砌的图像,所述相机与控制系统连接,能够将采集的图像传输给控制系统。
结合第一方面,本发明的实施例提供了第一方面的一种可能实施方式,所述相机采用红外相机。
结合第一方面,本发明的实施例提供了第一方面的一种可能实施方式,所述摄像机构还包括照明件,用于对渗漏水修复区域提供光照条件。
第二方面,本发明的实施例提供了一种公路隧道渗漏水自动修复装置,包括车体,所述车体安装有所述的公路隧道渗漏水自动修复机构。
第三方面,本发明的实施例提供了一种公路隧道漏水自动修复装置的方法:车体带动公路渗漏水自动修复机构运动,摄像机构拍摄隧道衬砌的图像,传输给控制系统,控制系统对图像进行分析确定隧道衬砌出现渗漏水的位置,机械臂将转盘移动至确定的渗漏水位置出,打磨机构启动,对出现渗漏水位置的隧道衬砌部位进行打磨,转动件带动转盘转动,钻孔机构转动至渗漏水位置,钻孔机构工作,对隧道衬砌进行钻孔,钻孔完毕后,转动件带动转盘转动,注浆机构移动至钻孔位置处,对钻孔进行注浆,完成隧道衬砌渗漏水位置的修复。
本发明的有益效果:
1.本发明的隧道渗漏水自动修复机构,能够利用摄像机构采集隧道衬砌的图像,并传输给控制系统,工作人员能够利用图像精准确定出现渗漏水的位置,避免了人工寻找渗漏水位置容易出现遗漏,劳动强度大的缺陷。
2.本发明的隧道渗漏水自动修复机构,具有机械臂,机械臂通过转动件连接转盘,转盘上设置有打磨机构、钻孔机构及注浆机构,能够实现自动化对渗漏水位置进行打磨、钻孔和注浆,无需手持设备进行操作,降低了工作人员的劳动强度,无需花费大量时间和精力对工作人员进行培训。
3.本发明的隧道渗漏水自动修复机构,机械臂能够带动转盘、打磨机构、钻孔机构及注浆机构在空间内运动,当修复隧道拱顶或其他较高部位的渗漏区域时,无需大型起重装置的使用,避免了空间的大量占用,避免了对交通通行功能的影响。
附图说明
构成本申请的一部分的说明书附图用来提供对本申请的进一步理解,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的限定。
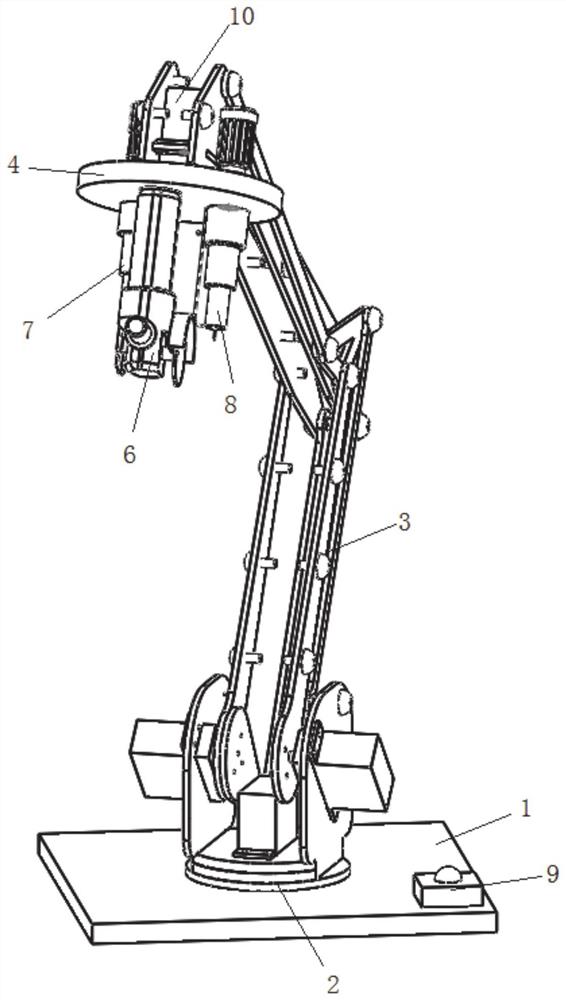
图1为本发明实施例1整体结构示意图;
图2为本发明实施例1转盘与打磨机构、钻孔机构及注浆机构装配示意图;
图3为本发明实施例1摄像机构结构示意图;
其中,1.支撑板,2.回转平台,3.机械臂,4.转盘,5.转轴,6.打磨机构,7.钻孔机构,7-1.钻孔电机,7-2.连接座,7-3.第一伸缩件,7-4.钻头,8.注浆机构,8-1.浆液筒,8-2.注浆泵,8-3.注浆管,8-4.灌浆针管,8-5.第二伸缩件,8-6.压力表,9.摄像机构,9-1.相机,9-2.支座,9-3.俯仰电机,9-4.LED灯管,9-5.支座固定板,10.转动电机。
具体实施方式
应该指出,以下详细说明都是例示性的,旨在对本申请提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
为了方便叙述,本发明中如果出现“上”、“下”、“左”“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用,仅仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
正如背景技术所介绍的,现有的隧道衬砌渗漏水区域需要工作人员肉眼观察,手持设备进行修复,劳动强度大,容易出现遗漏,针对上述问题,本申请提出了一种公路隧道渗漏水自动修复机构。
本申请的一种典型实施方式实施例1中,如图1-图3所示,一种公路隧道渗漏水自动修复机构,包括支撑件,所述支撑件采用支撑板1,所述支撑板上安装有回转平台2,所述回转平台连接有机械臂3,所述回转平台和机械臂采用现有结构即可,其具体结构在此不进行详细叙述,所述机械臂的末端连接有转动件,本实施例中,所述转动件采用转动电机10,转动电机的输出轴通过联轴器与设置在转盘4上表面的转轴5连接,转动电机能够带动转盘转动。
本实施例中,通过回转平台和机械臂的配合,能够实现转盘在上下高度10m,前后宽度5m的范围内进行运动,实现了转盘在空间内任意方向的运动。
所述转盘上安装有打磨机构6、钻孔机构7及注浆机构8,转动电机能够带动转盘转动,进而实现打磨机构、钻孔机构及注浆机构在渗漏水区域的切换,实现对渗漏水区域进行不同修复步骤的切换。
所述打磨机构采用现有的角磨机,所述角磨机的壳体与转盘的下表面固定连接。
所述钻孔机构包括钻孔驱动件,所述钻孔驱动件采用钻孔电机7-1,所述钻孔电机的电机壳体固定在转盘的上表面,所述钻孔电机的输出轴穿过转盘并通过连接座7-2与第一伸缩件7-3连接,所述第一伸缩件包括固定部和伸缩部,所述固定部与钻孔电机的输出轴固定连接,所述伸缩部的端部连接有钻头7-4。
本实施例中,所述第一伸缩件采用直线电机或电动推杆,只要能够输出直线运动即可。
钻孔电机能够带动钻头转动,第一伸缩件能够带动钻头在转动的同时进行直线运动,进而对隧道衬砌进行钻孔。
所述注浆机构8包括浆液筒8-1,所述浆液筒固定在转盘的下表面,所述浆液筒用于盛装注浆用浆液,所述浆液筒上设置有加液口,所述加液口用于向浆液筒内加入浆液,加液口能够利用封堵塞进行封堵。所述浆液筒上还设置有出液管,用于浆液的流出。
所述转盘的上表面固定有注浆泵8-2,所述浆液筒的出液管通过注浆管8-3与注浆泵的进口端连接,所述注浆泵的出口端通过注浆管与灌浆针管8-4连接,注浆泵能够驱动浆液筒内的浆液进入灌浆针管,并通过灌浆针管流出。
所述灌浆针管与固定在浆液筒的第二伸缩件8-5连接,本实施例中,所述第二伸缩件采用液压缸或气缸或直线电机或电动推杆,只要能够输出直线运动即可,第二伸缩件能够带动灌浆针管做直线运动。
所述注浆泵与灌浆针管之间的注浆管上安装有压力表8-6,所述压力表能够监测注浆管内的注浆压力,通过调节注浆泵的工作功率,实现高压匀速注浆。
所在支撑板上还安装有摄像机构9,所述摄像机构包括相机9-1,本实施例中,所述相机采用红外相机,所述相机通过转轴与支座9-2转动连接,所述转轴与固定在支座上的俯仰驱动件连接,本实施例中,所述俯仰驱动件采用俯仰电机9-3,所述俯仰电机的上输出轴与转轴连接,能够带动相机的转动,所在支座通过支座固定板9-5固定在支撑板上。
所述支座上还安装有照明件,本实施例中,所述照明件采用LED灯管9-4,用于对渗漏水修复区域提供光照条件,方便对其进行图像采集并观察修复情况。
本实施例中,所述相机与控制系统连接,能够将采集的图像传输给控制系统,控制系统与回转机构、机械臂、转动电机、钻孔电机、注浆泵、第一伸缩件、第二伸缩件连接,能够控制其工作,控制系统通过无线传输与遥控器连接,遥控器能够向控制系统发送指令。
本实施例中,可利用相机采集隧道衬砌的图像,将采集的图像传输给控制系统,控制系统对图像进行分析,进而确定出现渗漏水的位置,无需人工肉眼寻找渗漏水的位置,不容易出现遗漏,且降低了工作人员的劳动强度。
且通过机械臂、转动电机和回转平台的作用,能够将转盘移动至渗漏水位置,并且通过转盘的转动使打磨机构、钻孔机构和注浆机构在渗漏水位置进行切换,依次完成打磨工作、钻孔工作和注浆工作,无需人工手持设备进行修复,极大的降低了工作人员的劳动强度,提高了工作效率。
实施例2:
本实施例公开了一种公路隧道渗漏水自动修复装置,包括车体,所述车体采用现有的利用电机驱动的行走小车即可,其具体结构不进行详细叙述,所述车体安装有实施例1所述的公路隧道渗漏水自动修复机构,所述车体通过电磁卡扣与支撑板连接,实现车体与公路隧道渗漏水自动修复机构的固定。
实施例3:
本实施例公开了实施例2所述的公路隧道渗漏水自动修复装置的工作方法:预先检查整个修复装置的电量是否充足,工作人员利用遥控器控制车体进入隧道,带动公路隧道渗漏水自动修复机构运动至隧道衬砌发生渗漏水的位置,红外相机采集隧道衬砌的图像,并传输给控制系统,控制系统对图像进行分析,得到渗漏水的区域的精确位置,控制系统根据图像得到渗漏水区域精确位置的方法采用现有技术,其具体过程不进行详细叙述,控制系统控制回转平台及机械臂工作,将转盘移动至渗漏水区域位置,转动电机带动转盘转动,带动角磨机转动至与渗漏水区域位置对齐,同时第一伸缩件和第二伸缩件收缩,机械臂运动,使得角磨机的砂轮接触隧道衬砌,角磨机启动,机械臂带动角磨机沿隧道衬砌表面运动,角磨机对隧道衬砌表面进行打磨,对衬砌表面进行平整,打磨完成后,转动电机带动转盘转动,使得钻头对准渗漏水区域,钻孔电机及第一伸缩件工作,钻头转动并做直线运动,对隧道衬砌进行钻孔,在指定区域钻设灌浆孔、辅助灌浆孔及排气孔,钻孔完成后,第一伸缩件复位,转动电机带动转盘转动,使得灌浆针管对准灌浆孔,第二伸缩件工作,将灌浆针管伸入灌浆孔中,注浆泵启动,将浆液注入灌浆孔中,通过观察压力表读数,控制注浆泵的功率,进行匀速高压注浆,保证了修复质量,注浆结束后,收回灌浆针管,寻找下一个渗漏区域,重复上述过程,直至所有修复工作完成。
整个修复过程采用自动控制进行,无需人工劳动,减少了人工的参与程度,降低了劳动强度,缩短了修复工作的时间,并且有效降低了修复误差,在机械臂的作用下,转盘能够运动至较高的位置,不需要大型起重机等大型机械,只占用单侧车道,对隧道运营影响较小。
上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
- 一种公路隧道渗漏水自动修复机构、修复装置及方法
- 地下连续墙槽段接缝处渗漏水检测及封堵修复装置及其方法