一种环境自适应机电式车载平台调平系统及方法
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及机电伺服控制技术领域,具体涉及一种环境自适应机电式车载平台调平系统及方法。
背景技术
车载平台作为雷达、导弹、火炮等武器装备的常见载荷,运输时通过平台车的悬挂轮胎组实现全地形行驶,工作时采用位于平台四周的电动支腿将平台调至一定精度范围的水平状态,提高作战设备的系统稳定性,车载平台具有机动性高,稳定性高,环境适应性强的特点。车载调平平台按工作方式可分为液压式和机电式,机电式相比于液压式具有更高调平效率和更高调平精度等特点。
车载平台常为矩形平板,因此常见的机电调平方式为四点调平,但由于机电式调平平台固有的结构和电气特性以及平行四边形不稳定的特性,调平过程中容易发生某条电动支腿与其他三条电动支腿受力状态不同,从而引起控制器判断出错衍生电动支腿不断伸出至调平失控等问题。此外,由于悬挂轮胎组悬挂较软,电动支腿伸出过程中,悬挂轮胎组仍存在支撑受力的情况,合理地推算电动支腿受力状况并排除悬挂轮胎组等外界因素对车载平台调平的干扰同样不可忽视。为此,提出一种环境自适应机电式车载平台调平系统及方法。
发明内容
本发明所要解决的技术问题在于:如何解决因机电式四点调平电动支腿受力不均引起电流检测异常使得控制器判断出错从而直接导致调平失败的问题,提供了一种环境自适应机电式车载平台调平系统。
本发明是通过以下技术方案解决上述技术问题的,本发明包括车载平台、悬挂轮胎组、电动支腿、交流伺服电机、水平传感器、控制器;
所述车载平台,用于作为被调平对象,提供平面安装作战装备,同时作为所述控制器、所述电动支腿、所述水平传感器、所述悬挂轮胎组的安装载体;
所述悬挂轮胎组,用于所述车载平台的运输工作及在初步落地时提供受力支撑;
所述电动支腿,呈矩阵分布,用于在所述车载平台调平时提供调平受力支撑;
所述交流伺服电机,与所述电动支腿一一对应设置,用于给所述电动支腿提供动力,并将电流反馈给所述控制器,监测电动支腿受力大小,电机编码器位于交流伺服电机尾部,用于反馈交流伺服电机的运动数值;
所述水平传感器,用于检测所述车载平台水平方向的平面度,并以X、Y二维数值方式将所述车载平台的平面度反馈给所述控制器;
所述控制器,用于监测所述交流伺服电机的电流和水平传感器的反馈数值并下达相应的指令给所述交流伺服电机;
所述交流伺服电机、所述水平传感器分别与所述控制器通信连接。
更进一步地,所述水平传感器设置在所述车载平台的中心位置。
更进一步地,X方向与车横向重合并指向车身一侧为正,Y方向与车纵向重合并指向车尾方向为正。
更进一步地,每个所述电动支腿的单步行程对所述车载平台的两个维度平面度影响小于1′。
更进一步地,所述水平传感器的检测精度在6”内。
本发明还提供了一种环境自适应机电式车载平台调平方法,采用上述的调平系统进行车载平台的调平工作,包括以下步骤:
S1:独立伸出各电动支腿并分别记录空载电流及计算阈值电流
车载平台就位后,控制四条电动支腿进行独立伸出,记录单条电动支腿对应的初始电机编码反馈值和从开始伸出记为T
S2:对水平传感器数值采样判断变化是否超过设置值
控制器继续驱动未到阈值电流的第四条电动支腿伸出,同时采样读取水平传感器的平面度数值变化,X、Y方向水平传感器变化数值分别记为ΔX
S3:确定最高点支腿后保持最高点支腿不动并使水平传感器的两维数值均在设定范围内
读取X、Y方向水平传感器的水平度数值并记为X
S4:检测最高点支腿电流是否超过其阈值电流
检测最高点电动支腿H
更进一步地,在所述步骤S1中,T
更进一步地,在所述步骤S2中,采样水平传感器的采样间隔时间ΔT=50ms;当|ΔX
更进一步地,在所述步骤S3中,X
本发明相比现有技术具有以下优点:该环境自适应机电式车载平台调平系统,能够解决不同地形环境下车载平台电动支腿自适应设定落地检测阈值电流以及机电式四点调平不平衡引起某条电动支腿检测电流小于阈值电流使该电动支腿持续伸出导致调平失败的问题,可适用于不同地形环境下车载平台系统自适应调平,调平方法较传统四点机电调平稳定性更高,适应性更强,值得被推广使用。
附图说明
图1是本发明实施例中调平系统的原理图;
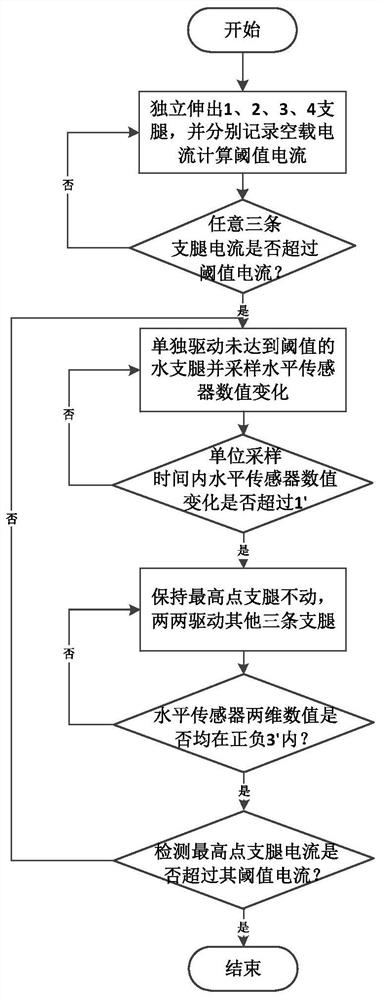
图2是本发明实施例中调平方法的流程示意图;
图3是本发明实施例中调平过程各电动支腿电流变化曲线。
具体实施方式
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
本实施例提供一种技术方案:一种环境自适应机电式车载平台调平系统,包括:
车载平台,作为被调平对象,用于提供平面安装作战装备,同时作为调平装置的安装载体;
悬挂轮胎组,用于所述车载平台运输工作以及在调平时提供初步落地受力支撑;
矩阵排布的电动支腿,用于车载平台调平时调平受力支撑;
交流伺服电机,用于给电动支腿提供动力,并将电流反馈给控制器,监测电动支腿受力大小;
水平传感器,用于检测车载平台水平方向平面度,并以X、Y二维数值方式将车载平台平面度反馈给控制器,其中X方向与车横向重合并指向车身右侧为正,Y方向与车纵向重合并指向车尾方向为正;
控制器,用于监测交流伺服电机电流和水平传感器的反馈数值并下达相应的指令给交流伺服电机。
如图1所示,为本实施例中调平系统的原理图,在本实施例中,悬挂轮胎组7共有六个相同规格大小的轮胎,对称分布在车载平台左右两侧,位于车头附近左右各一个,位于车尾附近左右各两个,电动支腿共四只,第1电动支腿1位于平台右车头轮胎后方,第2电动支腿2位于平台右车尾轮胎后方,第3电动支腿3位于平台左车尾轮胎后方,第4电动支腿4位于平台左车头轮胎后方,每只电动支腿顶端均有一个交流伺服电机6用于驱动电动支腿运动,交流伺服电机6通过线缆与位于车尾的控制器5相连完成通信,水平传感器8位于车载平台的中心位置。
在本实施例中,监测电动支腿交流伺服电机的绕组电流推论电动支腿的受力状态,建立绕组电流和电动支腿受力的映射关系;利用实验验证推算出电动支腿空载运转时的电机绕组电流和电动支腿落地时的电机绕组阈值电流之间的比例关系。
在本实施例中,车载调平电动支腿落地利用三角形稳定特点采用三腿伸出达到阈值电流检测判断,第四条电动支腿伸出是否落地采用水平传感器单位采样时间内是否引起平台动变化加以判断。
在本实施例中,阈值电流根据调平时交流伺服电机电流值反馈及相应的计算推导,自适应设置,根据不同环境情况自动改变。
在本实施例中,每条电动支腿的单步行程对车载平台的两个维度平面度影响应小于1′。
如图2所示,本实施例还提供了一种利用所述系统实现环境自适应机电式车载平台调平的方法,包括如下步骤:
步骤一:车载平台就位后,控制器控制交流伺服电机分别驱动四条电动支腿进行独立伸出,记录单条电动支腿对应的初始电机编码反馈值和从开始伸出记为T
步骤二:控制器继续驱动未到阈值电流的第四条电动支腿伸出,同时采样读取水平传感器的平面度数值变化,采样间隔时间ΔT=50ms,X、Y方向水平传感器变化数值分别记为ΔX
步骤三:读取X、Y方向水平传感器数值并记为X
步骤四,检测最高点电动支腿H
综上所述,上述实施例的环境自适应机电式车载平台调平系统,能够解决不同地形环境下车载平台电动支腿自适应设定落地检测阈值电流以及机电式四点调平不平衡引起某条电动支腿检测电流小于阈值电流使该电动支腿持续伸出导致调平失败的问题,可适用于不同地形环境下车载平台系统自适应调平,调平方法较传统四点机电调平稳定性更高,适应性更强,值得被推广使用。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种环境自适应机电式车载平台调平系统及方法
- 一种环境自适应机电式车载平台调平系统