自主工作器具
文献发布时间:2023-06-19 10:14:56
背景技术
从CN205320575U中已经已知一种自主工作器具、尤其是自主割草机,该自主工作器具包括至少一个驱动单元、至少一个传感器单元和至少一个控制和/或调节单元,所述传感器单元至少用于尤其是借助分析处理电容的变化来检测至少一个对象的靠近,所述控制和/或调节单元用于控制和/或调节驱动单元,其中,控制和/或调节单元配置成用于在控制和/或调节所述驱动单元时考虑由传感器单元接收到的信号。
发明内容
本发明的出发点是一种自主工作器具、尤其是自主割草机,其具有至少一个驱动单元、至少一个传感器单元和至少一个控制和/或调节单元,所述传感器单元至少用于尤其是借助分析处理电容的变化来检测至少一个对象的靠近,所述控制和/或调节单元用于控制和/或调节所述驱动单元,其中,所述控制和/或调节单元配置成用于在控制和/或调节驱动单元时考虑由传感器单元接收到的信号。
提出了,传感器单元配置成用于尤其是借助分析处理电容、电阻或者电压的变化来检测作用在传感器单元的传感面上的对象的力特征参数,其中,力特征参数能够被控制和/或调节单元考虑以至少用于控制和/或调节驱动单元。传感器单元优选包括网格状或者栅格状布置的导电元件和包覆或者遮盖网格状或者栅格状布置的导电元件的弹性体层。传感器单元的导电元件优选与控制和/或调节单元电连接。对于本领域技术人员来说,传感器单元的构型例如已经从DE102010034717A1中已知,使得关于传感器单元的其他特征尤其参阅DE102010034717A1。然而也可设想,传感器单元具有本领域技术人员视为有意义的通过传感面实现靠近和力特征参数的检测的其他构型。优选地,传感器单元可弹性变形地构造。传感器单元优选如此构造,以致传感器单元的弹性变形使得能检测力特征参数。对象靠近传感器单元的传感面的检测优选通过借助于控制和/或调节单元分析处理电容的变化来实现。作用在传感器单元的传感面上的对象的力特征参数的检测优选借助于分析处理电容、电阻或者电压的变化来实现。传感器单元优选薄膜状地构造。传感器单元优选具有尤其是小于20mm、优选地小于10mm并且特别优选小于5mm的最大材料厚度。传感器单元的最大材料厚度优选由传感器单元的导电元件的最大尺寸、尤其是最大直径和传感器单元的弹性体层的最大尺寸、尤其是最大材料厚度一起形成,尤其是在导电元件和弹性体层彼此连接的状态下是如此。
“自主工作器具”尤其应理解为一个器具,该器具在一个区域中和/或在一个周围环境中自动前进、取向或导航并且尤其自动地加工一个工作区域,尤其是根据训练过程在一个区域中和/或在一个周围环境中自动前进和/或取向并且尤其自动地加工一个工作区域。表述“自动前进和/或取向”尤其应限定所述工作器具尤其根据训练过程而没有人为干预地前进运动、取向和/或导航。优选地,所述自主工作器具根据由操作者以该自主工作器具执行的训练过程在一个区域中和/或在一个周围环境中自动前进或者说在一个区域中和/或在一个周围环境中自动取向。所述自主工作器具能够构造为自主割草机、自主吸尘器、自主清扫机、自主输送车、自主飞行器具、自主农业器具等。优选地,所述自主工作器具构造为自主割草机,该自主割草机设置用于走过和/或加工构造为草坪面的工作面和/或构造为花园环境的工作环境。
优选地,自主工作器具包括至少一个方位定位单元,其中,所述控制和/或调节单元配置成用于,尤其是除了分析处理由传感器单元接收到的信号之外,还分析处理借助方位定位单元检测到的方位定位特征参数以用于控制和/或调节驱动单元。表述“方位定位单元”尤其应限定一个单元,该单元配置成用于基于检测至少一个特征参数而求取自主工作器具的方位、尤其是全球方位。特别优选地,方位定位单元构造为卫星导航定位单元、尤其是GPS接收器或者伽利略接收器。然而也可设想,方位定位单元构造为磁罗盘、测距单元和/或偏振滤光器罗盘等。
自主工作器具优选具有构造为割草机构的加工单元。加工单元能够借助至少设置用于驱动自主工作器具的行走或者履带机构单元的驱动单元或者借助单独的割草机构驱动单元来驱动,该割草机构驱动单元与用于驱动行走或者履带机构单元的驱动单元分开独立构造。构造为割草机构的加工单元优选具有本领域技术人员已经已知的构型。构造为割草机构的加工单元尤其包括至少一个切割元件、至少一个割草机构驱动单元和/或至少一个割除物收集单元。“设置”尤其应理解为专门地配置、专门地设计、专门地配备和/或专门地编程。“一个元件和/或一个单元设置或者配置用于确定的功能”尤其应理解为,该元件和/或该单元在至少一个应用状态和/或运行状态下满足和/或实施所述确定的功能。
自主工作器具优选包括至少一个通信单元,该通信单元配置成用于,为了至少从控制和/或调节单元和/或至少向控制和/或调节单元传输电子数据而与至少一个构造为基站或者构造为另一个自主工作器具、尤其构造为另一个自主割草机的外部单元通信。通信单元优选构造为无线通信单元。通信单元能够构造为WLAN通信单元、蓝牙通信单元、无线电通信单元、RFID通信单元、NFC单元、红外通信单元、移动无线电网通信单元等。特别优选地,通信单元设置用于双向数据传输。在一个替代构型中,通信单元构造为有线通信单元,例如LAN通信单元、USB通信单元、嵌线通信单元(Einfassungsdrahtkommunikationseinheit)等。特别优选地,能够借助通信单元来传输电子数据,所述电子数据使得能实现用于自主工作器具的自主前进和/或工作面的自主加工的控制策略。
“控制和/或调节单元”尤其应理解为具有至少一个控制电子部件的单元。“控制电子部件”尤其应理解为具有处理器单元和存储单元以及具有存储在该存储单元中的运行程序的单元。所述运行程序优选设置用于,根据由传感器单元传输到控制和/或调节单元的信号来控制和/或调节尤其是至少所述驱动单元和/或加工单元。
借助自主工作器具的根据本发明的构型能够有利地实现优化地控制和/或调节自主工作器具。有利地,能够简单地利用传感器单元来检测在自主工作器具的工作过程期间能够出现的各种场景。有利地,能够基于分析处理传感器单元的传感器数据实现可靠且安全的控制策略。有利地,能够实现用于自主工作器具的自主运行的紧凑且可灵活使用的传感器单元。
此外提出了,传感器单元配置成用于检测靠近传感器单元的传感面的对象或者对所述传感器单元的传感面施加力的对象在传感器单元的传感面上的作用位置,其中,靠近的对象或者施加力的对象的所述作用位置能够被控制和/或调节单元考虑以至少用于控制和/或调节所述驱动单元。“在传感面上的作用位置”尤其应理解为在传感面上的一个位置,在该位置上,基于对象靠近传感面和/或基于对象通过接触而引起的对传感面的作用力,传感器单元的特征参数以可测量的方式发生变化。优选地,靠近传感器单元的传感面的对象或者对传感器单元的传感面施加力的对象在传感器单元的传感面上的作用位置基于传感器单元的导电元件的网格状或者栅格状的布置而能够被检测出。有利地,借助根据本发明的构型,能够基于分析处理传感器单元的传感器数据实现可靠且安全的控制策略。有利地,能够识别出,一个对象从哪个方向靠近或者该对象在哪个位置作用在传感面上,以便例如借助控制和/或调节单元来计算用于自主工作器具的有利的规避策略。
此外提出了,自主工作器具具有至少一个用于至少部分地遮盖、接收或者支承控制和/或调节单元和/或驱动单元的壳体和/或底盘单元,其中,传感器单元至少部分地布置在壳体和/或底盘单元的外表面上或者至少部分地形成壳体和/或底盘单元的外表面。可设想,用于根据本发明地解决任务的自主工作器具在一个替代构型中与用于检测力特征参数的传感器单元无关地构造。优选地,自主工作器具在替代构型中、尤其是在与用于检测力特征参数的传感器单元无关地构造的构型中包括至少所述驱动单元、至少所述传感器单元、至少所述控制和/或调节单元和至少所述壳体和/或底盘单元,所述传感器单元至少用于尤其是借助分析处理电容的变化来检测至少一个对象的靠近,所述控制和/或调节单元用于控制和/或调节驱动单元,所述壳体和/或底盘单元用于至少部分地遮盖、接收或者支承控制和/或调节单元和/或驱动单元,其中,控制和/或调节单元配置成用于至少在控制和/或调节驱动单元时考虑由传感器单元接收到的信号,其中,传感器单元至少部分地布置在壳体和/或底盘单元的外表面上或者至少部分地形成壳体和/或底盘单元的外表面。壳体和/或底盘单元的外表面优选背离壳体和/或底盘单元的面向控制和/或调节单元和/或驱动单元的内侧面。优选地,传感器单元基于布置在外表面上或者基于至少部分地形成外表面而面向环绕自主工作器具的周围环境。优选地,传感器单元至少部分地形成壳体和/或底盘单元的外壳。传感器单元能够与壳体和/或底盘单元一件式地构造,尤其是通过多组分注射方法等,或者,传感器单元能够借助力锁合、形状锁合和/或材料锁合连接而布置、尤其是固定在壳体和/或底盘单元的外表面上。也可设想,传感器单元在空间上布置在壳体和/或底盘单元的外表面和自主工作器具的可弹性变形的元件——例如碰撞保护件、附加的壳体元件等——之间,或者,集成在自主工作器具的可弹性变形的元件——例如碰撞保护件、附加的壳体元件等——中。传感器单元能够多层地构建。例如可设想,传感器单元的至少一个传感面是内置的或者说受壳体和/或底盘单元的另一个壳体元件保护。借助根据本发明的构型,基于分析处理传感器单元的传感器数据能够有利地实现可靠且安全的控制策略。有利地能够实现用于检测不同特征参数的大的传感面,该大的传感面实现了可靠且安全的控制策略。
此外提出了,自主工作器具具有至少一个——尤其是前述的——用于至少部分地遮盖、接收或者支承控制和/或调节单元和/或驱动单元的壳体和/或底盘单元,其中,传感器单元至少部分地布置在壳体和/或底盘单元的、沿主运动方向定向的前侧面上。优选地,壳体和/或底盘单元的前侧面是壳体和/或底盘单元的、背离行走或者履带机构单元的驱动轮的侧面。“主运动方向”尤其应理解为一个方向,自主工作器具在执行工作过程、尤其是割草过程期间主要沿该方向运动。壳体和/或底盘单元尤其包括至少一个壳体元件,该壳体元件可拆卸地布置在壳体和/或底盘单元的底盘上。壳体和/或底盘单元的底盘优选设置成接收和/或支承控制和/或调节单元和驱动单元。壳体元件尤其构造为盖,所述盖以本领域技术人员已经已知的方式可拆卸地布置在底盘上。壳体和/或底盘单元的前侧面优选由壳体元件形成。然而替代地也可设想,前侧面由底盘单独地形成或者由壳体元件和底盘一起形成。壳体和/或底盘单元的前侧面优选背离壳体和/或底盘单元的后侧面。优选地,壳体和/或底盘单元的前侧面和后侧面通过壳体和/或底盘单元的侧壁侧面而彼此连接。后侧面和侧壁侧面优选由壳体元件形成。替代地也可设想,后侧面和侧壁侧面由底盘形成或者由壳体元件和底盘一起形成。传感器单元能够从前侧面开始部分地延伸到侧壁侧面中。替代或者附加地可设想,传感器单元、尤其是传感器单元的传感面至少部分地布置在后侧面和/或侧壁侧面上。在传感器单元布置在前侧面、后侧面和侧壁侧面的情况下,可设想:传感器单元具有单个连贯的传感面,该传感面在前侧面、后侧面和侧壁侧面上延伸;或者传感器单元具有多个彼此电连接的传感面,这些传感面,尤其是彼此间隔开地,分散地布置在前侧面、后侧面和侧壁侧面上。借助根据本发明的构型,能够基于分析处理传感器单元的传感器数据有利地实现可靠且安全的控制策略。有利地,能够实现用于检测不同特征参数的、使得能实现可靠且安全的控制策略的、大的传感面。有利地,能够可靠地检测对象的驶近。有利地,在自主工作器具构型为自主割草机的情况下能够检测待加工的植物植被是否存在,尤其是因为基于靠近或者接触布置在前侧面上的传感面而能够可靠地检测到草叶等。
此外提出了,自主工作器具具有至少一个——尤其是前述的——用于至少部分地遮盖、接收或者支承控制和/或调节单元和/或驱动单元的壳体和/或底盘单元,其中,传感器单元覆盖或者构成壳体和/或底盘单元的外表面的至少大部分。壳体和/或底盘单元的外表面优选面向环绕自主工作器具的周围环境。壳体和/或底盘单元的内表面优选背离环绕自主工作器具的周围环境,尤其是面向控制和/或调节单元和/或驱动单元。“大部分”尤其应理解为总值、尤其是壳体和/或底盘单元的整个外表面的大于30%、优选大于50%并且特别优选大于70%的份额。优选地,传感器单元的传感面覆盖或者形成壳体和/或底盘单元的整个外表面的、尤其是壳体和/或底盘单元的壳体元件的整个外表面和/或底盘的整个外表面的大于30%、优选大于50%并且特别优选大于70%。也可设想,传感器单元的传感面覆盖或者构造壳体元件和/或底盘的整个外表面的100%。优选地,壳体元件的整个外表面和底盘的整个外表面合起来形成壳体和/或底盘单元的整个外表面。借助根据本发明的构型,能够有利地基于分析处理传感器单元的传感器数据实现可靠且安全的控制策略。有利地,能够实现用于检测不同特征参数的、使得能实现可靠且安全的控制策略的、大的传感面。有利地,能够可靠地检测对象的驶近,或者例如在壳体元件上的物体、例如枝叶等,或者接触壳体元件的人/动物。
此外提出了,自主工作器具包括至少一个——尤其是前述的——加工单元、尤其是割草机构和至少一个——尤其是前述的——用于至少部分地遮盖、接收或者支承控制和/或调节单元和/或驱动单元的壳体和/或底盘单元,其中,传感器单元至少部分地在壳体和/或底盘单元上布置在加工单元的附近区域中。“附近区域”尤其应理解为与一个元件或者一个单元具有小于20mm、优选小于10mm并且特别优选小于5mm的距离的区域。优选地,传感器单元、尤其是传感器单元的至少一个传感面布置在壳体和/或底盘单元面向加工单元的侧面上、尤其是下侧面上。优选地,传感器单元、尤其是传感器单元的至少一个传感面尤其由于布置在壳体和/或底盘单元的下侧面上而具有相对于加工单元的以下距离,该距离小于20mm、优选小于10mm并且特别优选小于5mm。优选地,传感器单元、尤其是传感器单元的至少一个传感面至少基本上完全包围加工单元,尤其是在至少基本上垂直于加工单元的加工轴线、尤其是旋转轴线延伸的平面上观察是如此。替代或者附加地,传感器单元、尤其是传感器单元的至少一个传感面布置在加工元件、尤其是切割元件、例如切割刀具等上,或者布置在加工单元的切割元件接收部上。可设想,传感器单元、尤其是传感器单元的至少一个传感面从前侧面、后侧面和/或至少其中一个侧壁侧面开始延伸到加工单元的附近区域中,或者,传感器单元具有单个传感面或者多个彼此间隔开布置的传感面,所述单个传感面或者多个传感面布置在加工单元的附近区域中。优选地,传感器单元的、布置在壳体和/或底盘单元的不同位置上的这些传感面至少彼此电连接或者至少为了传输信号而与控制和/或调节单元连接。借助根据本发明的构型,能够有利地基于分析处理传感器单元的传感器数据实现可靠且安全的控制策略。有利地能够实现例如监控加工单元的危险区域,以便尤其尽量避免伤害人或者动物。有利地能够监控例如工作步骤、尤其是草的切割的可靠执行。
此外提出了,自主工作器具具有至少一个——尤其是前述的——用于至少部分地遮盖、接收或者支承控制和/或调节单元和/或驱动单元的壳体和/或底盘单元,其中,传感器单元至少部分地沿着壳体和/或底盘单元的整个周向延伸部布置在壳体和/或底盘单元上、尤其是壳体和/或底盘单元的外表面上。优选地,传感器单元、尤其是传感器单元的至少一个传感面沿着壳体和/或底盘单元的整个周向延伸部,沿着长于壳体和/或底盘单元的整个周向延伸部的30%、优选50%并且特别优选70%的路径延伸。壳体和/或底盘单元的整个周向延伸部优选在至少基本上垂直于加工单元的加工轴线、尤其是旋转轴线的平面中延伸。可设想,传感器单元具有单个连贯的、至少部分地沿着壳体和/或底盘单元的整个周向延伸部在壳体和/或底盘单元上延伸的传感面,或者,传感器单元具有多个彼此间隔开的、至少部分地沿着壳体和/或底盘单元的整个周向延伸部在壳体和/或底盘单元上延伸的传感面。借助根据本发明的构型,有利地能够基于分析处理传感器单元的传感器数据实现可靠且安全的控制策略。有利地,能够实现用于检测不同特征参数的、使得能实现可靠且安全的控制策略的、大的传感面。有利地,能够例如可靠地检测对象的驶近。
此外提出了,自主工作器具包括至少一个——尤其是前述的——能够借助驱动单元来驱动的行走或者履带机构单元,其中,传感器单元至少部分地布置在行走或者履带机构单元上。行走或者履带机构单元优选能够借助驱动单元的至少一个马达、尤其是电动马达被驱动,尤其用于使自主工作器具前进。行走或者履带机构单元优选包括至少一个驱动轮、尤其是至少两个能够彼此独立地驱动的驱动轮,或者至少一个驱动链、尤其是至少两个能够彼此独立地驱动的驱动链。优选地,行走或者履带机构单元的每个驱动轮配属有驱动单元的单个马达。优选地,传感器单元、尤其是传感器单元的至少一个传感面布置在所述至少一个驱动轮或者所述至少一个驱动链的外表面或者外圆周上。替代或者附加地可设想,传感器单元、尤其是传感器单元的至少一个传感面布置在行走或者履带机构单元的轮毂元件上、行走或者履带机构单元的轮辋元件背离壳体和/或底盘单元的外侧面上,等等。借助根据本发明的构型,有利地能够基于分析处理传感器单元的传感器数据实现可靠且安全的控制策略。有利地,能够实现用于检测不同特征参数的、使得能实现可靠且安全的控制策略的、大的传感面。有利地能够检测行走或者履带机构单元与地面的可靠接触。有利地能够检测由自主工作器具作用到地面上的力,通过该力能够有利地推断出自主工作器具的牵引。有利地,能够推断出地面的类型,其方式优选是,通过控制和/或调节单元对借助传感器单元检测到的特征参数分析处理。
此外提出了,自主工作器具包括至少一个用于手动输入操作者命令的输入单元,所述操作者命令能够被控制和/或调节单元考虑以至少用于控制和/或调节驱动单元,其中,传感器单元与输入单元至少部分一件式地构造。手动输入单元优选设置用于手动输入操作者命令,其中,控制和/或调节单元设置成在控制和/或调节驱动单元时考虑至少一个手动输入的操作者命令。手动输入单元能够构造为触敏显示器、键盘、选择开关等。能够借助手动输入单元输入的手动操作者命令能够例如构造为日期,时间,工作过程频率、尤其是割草频率,工作过程间隔预给定值、尤其是割草间隔预给定值,激活命令(开/关命令)等。“传感器单元与输入单元至少部分一件式地构造”尤其应理解为:传感器单元和输入单元包括至少一个共同使用的元件。优选地,传感器单元的至少一个传感面构成输入单元的至少一个输入元件,操作者能够借助该输入元件手动地输入操作者命令。优选地,传感器单元的、构成输入单元的至少一个输入元件的至少一个传感面布置在壳体和/或底盘单元、尤其是壳体元件背离加工单元的侧面上、尤其是上侧面上。借助根据本发明的构型,有利地能够基于分析处理传感器单元的传感器数据实现可靠且安全的控制策略。有利地,能够以结构简单的方式生成传感器单元的附加利用。有利地,能够尽量省去单独的输入单元。有利地,能够节省成本和组装花费。有利地,能够在至少基本上自动控制和/或调节自主工作器具的情况下实现操作者意愿。
此外,本发明的出发点是一种用于自动地控制和/或调节根据本发明的自主工作器具、尤其是根据本发明的自主割草机的方法。提出了,在至少一个方法步骤中,控制和/或调节单元考虑对象的借助传感器单元检测到的靠近和/或作用在传感器单元的传感面上的对象的、借助所述传感器单元检测到的力特征参数,以至少用于控制和/或调节驱动单元。借助根据本发明的自主工作器具的构型,能够有利地实现优化地控制和/或调节自主工作器具。有利地,能够简单地利用传感器单元检测出能够在自主工作器具的工作过程期间出现的不同场景。有利地,能够基于分析处理传感器单元的传感器数据实现可靠且安全的控制策略。
此外提出了,在至少一个方法步骤中,控制和/或调节单元根据由传感器单元接收到的信号来控制和/或调节自主工作器具的加工单元、尤其是割草机构和/或行走或者履带机构单元。借助根据本发明的构型,有利地能够基于分析处理传感器单元的传感器数据实现可靠且安全的控制策略。有利地,在基于分析处理传感器单元的传感器数据而识别出人的躯体部分或者动物存在于危险区域中时能够执行例如加工单元的关断。
此外提出了,在至少一个方法步骤中,控制和/或调节单元根据由传感器单元接收到的信号来确定移动性特征参数。“移动性特征参数”尤其应理解为以下特征参数,该特征参数允许推断出行走或者履带机构单元等的牵引和/或该特征参数限定由自主工作器具作用到地面上的力。有利地,能够在计算控制策略的情况下考虑移动性特征参数。
此外提出了,在至少一个方法步骤中,控制和/或调节单元根据由传感器单元接收到的信号来确定地面特征参数。“地面特征参数”尤其应理解为以下特征参数,该特征参数限定地面的类型——例如沙地、混凝土地面、石头地面、草地、草甸等——或者诸如地面的湿度等的性质。有利地,能够在计算控制策略时考虑地面特征参数。
此外提出了,在至少一个方法步骤中,控制和/或调节单元根据由传感器单元接收到的信号来确定自主工作器具的脏污特征参数。“脏污特征参数”尤其应理解为一个特征参数,该特征参数限定脏污程度,尤其是壳体和/或底盘单元和/或传感器单元被污物、例如灰尘、割下的草、泥土等覆盖的情况。有利地,能够提早将警告消息输出给操作者,以便在损害安全的控制策略之前消除脏污。
此外提出了,在至少一个方法步骤中,控制和/或调节单元根据由传感器单元接收到的信号来确定靠近传感器单元的传感面的对象或者对传感器单元的传感面施加力的对象的组织特征参数。“组织特征参数”尤其应理解为一个特征参数,该特征参数限定组织的类型,例如人体组织、动物组织和/或植物组织。借助根据本发明的构型能够有利地进行对象的区分,尤其是以便尽量确保在自主工作器具的工作过程期间至少在加工单元的附近区域不存在动物或者人的躯体部分。有利地能够实现的自主工作器具的安全的控制策略。
根据本发明的自主工作器具和/或根据本发明的方法在此不应局限于上述应用和实施方式。根据本发明的自主工作器具和/或根据本发明的方法尤其是可为了满足在此所述的工作方式而具有与提到的数量不同数量的各个元件、构件和单元以及方法步骤。在公开文件中给出的值范围方面,在提到的边界内的值也应视为公开并且可任意使用。
附图说明
从以下附图描述中得出其他优点。在附图中呈现了本发明的一个实施例。附图、说明书和权利要求包含许多特征组合。本领域技术人员也可适宜地将这些特征单独看待并且将它们综合成有意义的其他组合。
附图示出:
图1以示意图示出根据本发明的自主工作器具、尤其是自主割草机,
图2以示意图示出根据本发明的自主工作器具在加工工作面期间的侧视图,
图3以示意图示出根据本发明的自主工作器具在加工工作面期间的另一个侧视图,
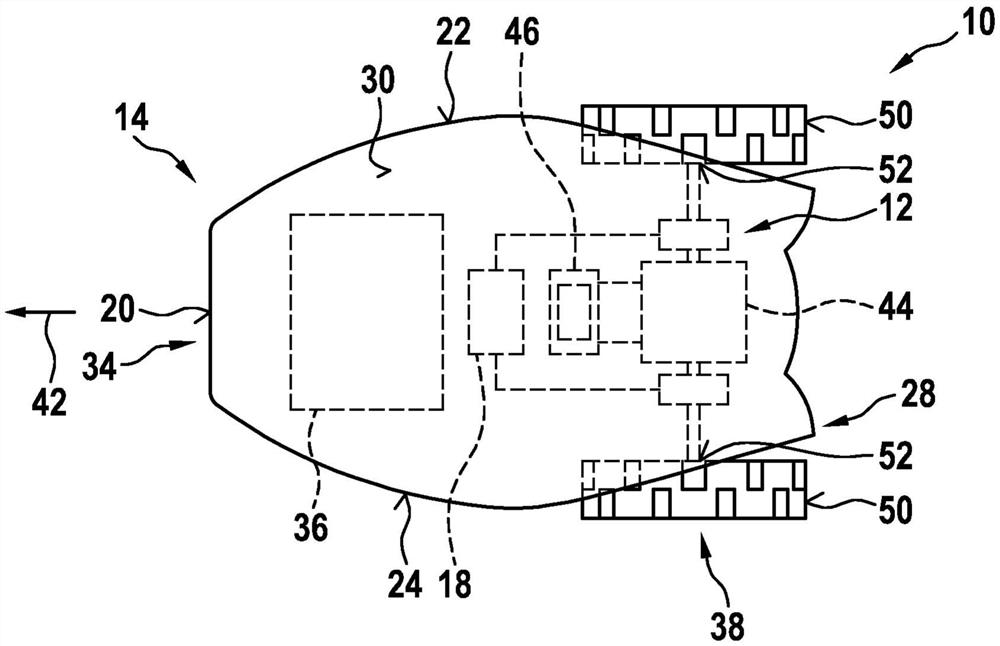
图4以示意图示出根据本发明的自主工作器具的俯视图,以及
图5示出用于自动控制和/或调节根据本发明的自主工作器具的根据本发明的方法的示意性流程。
具体实施方式
图1示出自主工作器具10,该自主工作器具包括至少一个驱动单元12、至少一个至少用于给驱动单元12供应能量的能量供应单元44和至少一个至少用于控制和/或调节驱动单元12的控制和/或调节单元18。此外,自主工作器具10包括至少一个传感器单元14,所述传感器单元至少用于尤其是借助分析处理电容的变化来检测至少一个对象16(参见图2和图3)的靠近。控制和/或调节单元18配置成用于至少在控制和/或调节驱动单元18时考虑由传感器单元14接收到的信号。驱动单元12优选构造为电动马达单元。然而也可设想,驱动单元12具有本领域技术人员视为有意义的其他构型,例如作为内燃机单元、混合式马达单元等的构型。能量供应单元44优选除了给驱动单元12的供应能量还设置为用于给自主工作器具10的其他部件——例如传感器单元14等——供应能量。能量供应单元44优选构造为蓄电池单元。然而也可设想,能量供应单元44具有本领域技术人员视为有意义的其他构型,例如有线电网部件单元、燃料电池、燃料存储单元等。自主工作器具10尤其包括至少一个壳体和/或底盘单元28,该壳体和/或底盘单元用于至少部分地遮盖、接收或者支承控制和/或调节单元18和/或驱动单元12。能量供应单元44优选布置在壳体和/或底盘单元28上或者中。自主工作器具10优选包括至少一个能够借助驱动单元12来驱动的行走或者履带机构单元38。行走或者履带机构单元38尤其具有本领域技术人员已经已知的构型。在图1至图4中所呈现且示例性的实施例中,行走或者履带机构单元38构造为轮式行走机构单元,该轮式行走机构单元包括至少一个能够驱动的驱动轮、尤其是至少两个能够彼此独立地驱动的驱动轮。行走或者履带机构单元38能够包括可转向和/或不可转向的轮,所述轮构造成能够驱动的或者无驱动的。行走或者履带机构单元38、尤其是行走或者履带机构单元38的至少一个驱动轮能够借助驱动单元12以本领域技术人员已知的方式被驱动。自主工作器具10优选包括至少一个方位定位单元46,该位定位单元设置用于确定自主工作器具10在工作区域内、尤其是在工作面上的位置。方位定位单元46能够布置在壳体和/或底盘单元28上或者中。方位定位单元46优选构造为GPS单元。然而也可设想,方位定位单元46具有本领域技术人员视为有意义的其他构型。
自主工作器具10在图1至图4中所呈现且示例性的实施例中构造为自主割草机,该自主割草机设置成,尤其是在训练过程之后在工作区域或者说工作环境内自主地前进并且自主加工布置在工作区域或者说工作环境中的工作面、尤其是草地。然而也可设想,自主工作器具10具有本领域技术人员视为有意义的其他构型,例如作为自主吸尘器、自主输送器具、用于加工农业用地的自主农业器具、自主飞行器具等的构型。为了加工工作面,自主工作器具10具有构造为割草机构的加工单元36。加工单元36具有本领域技术人员已经已知的构型。优选地,构造为割草机构的加工单元36能够具有至少一个切割元件、至少一个割草机构驱动单元和/或至少一个割除物收集单元。在自主工作器具10的特别有利的构型中,构造为割草机构的加工单元36能够借助驱动单元12来驱动。构造为割草机构的加工单元36借助驱动单元12的驱动能够根据需求地被开启或者关闭。优选地,驱动单元12在自主工作器具10的一个运行模式中设置成,仅驱动行走或者履带机构单元38以使自主工作器具10前进。在自主工作器具10的至少一个另外的运行模式中,驱动单元12优选设置成驱动行走或者履带机构单元38和构造为割草机构的加工单元36。本领域技术人员视为有意义的、用于借助驱动单元12来驱动行走或者履带机构单元38和/或构造为割草机构的加工单元36的其他运行模式同样是可设想的。
为了自主工作器具10在待加工的工作面上的导航和/或取向,自主工作器具10包括至少一个本领域技术人员已经已知的导航和/或取向单元(这里未详细呈现),该导航和/或取向单元与控制和/或调节单元18在数据技术上连接。导航和/或取向单元尤其具有本领域技术人员已经已知的构型,例如作为声音辅助的导航和/或取向单元、光学辅助的导航和/或取向单元等的构型。自主工作器具10至少设置成,尤其是在训练过程之后,为了执行工作过程、尤其是割草过程而借助导航和/或取向单元在工作区域或者说工作环境中自动地取向和/或导航,尤其是附加于考虑方位定位单元46的数据。工作区域或者说工作环境优选构造为花园区域或者说花园环境。
传感器单元14尤其是除了检测至少一个对象16的靠近之外,还配置成用于尤其是借助分析处理电容、电阻或者电压的变化来检测作用在传感器单元14的传感面20、22、24、26上的对象16的力特征参数,其中,力特征参数能够被控制和/或调节单元18考虑以至少用于控制和/或调节驱动单元12。传感器单元14优选包括网格状或者栅格状布置的导电元件(这里未详细呈现)和包覆或者遮盖网格状或者栅格状布置的导电元件的弹性体层(这里未详细呈现)。传感器单元14的导电元件优选与控制和/或调节单元18电连接。对于本领域技术人员来说,传感器单元14的构型例如已经从DE102010034717A1中已知,使得关于传感器单元14的其他特征尤其参阅DE102010034717A1。然而也可设想,传感器单元14具有本领域技术人员视为有意义的能通过传感面20、22、24、26来检测靠近和力特征参数的其他构型。优选地,传感器单元14可弹性变形地构造。传感器单元14优选如此构造,使得传感器单元14的弹性变形可实现力特征参数的检测。对象靠近传感器单元14的传感面20、22、24、26的检测优选通过借助于控制和/或调节单元18分析处理电容的变化来实现。作用在传感器单元14的传感面20、22、24、26上的对象16的力特征参数的检测优选通过借助于控制和/或调节单元18分析处理电容、电阻或者电压的变化来实现。传感器单元14优选薄膜状地构造。
尤其地,基于尤其是借助分析处理电容、电阻或者电压的变化来检测作用在传感器单元14的传感面20、22、24、26上的对象16的力特征参数,能够借助控制和/或调节单元18来确定,自主工作器具10是否是由于驱动力而朝向对象16移动或者是否是对象16本身将力施加到自主工作器具10上,例如动物或者人压向自主工作器具10等等。控制和/或调节单元18优选能够确定移动性特征参数。例如如果识别出,诸如动物或者人的对象16将力施加到向自主工作器具10上,则控制和/或调节单元18能够计算例如控制策略,该控制策略导致:自主工作器具10快速运动远离对自主工作器具10施加力的对象和/或停止激活加工单元36,以便尤其避免伤害或者损坏对象16。尤其地,通过分析处理电容变化或者电容能够推断出对象16的类型。控制和/或调节单元18优选根据传感器单元14的传感器数据确定组织特征参数。
此外,传感器单元14尤其是除了检测至少一个对象16的靠近和检测作用在传感器单元14的传感面20、22、24、26的对象16的力特征参数之外,还配置成用于检测靠近传感器单元14的传感面20、22、24、26的对象16或者对传感器单元14的传感面20、22、24、26施加力的对象16在传感器单元14的传感面20、22、24、26上的作用位置,其中,靠近的对象16或者施加力的对象16的所述作用位置能够被控制和/或调节单元18考虑以至少用于控制和/或调节驱动单元12。
有利地,自主工作器具10至少包括用于至少部分地遮盖、接收或者支承控制和/或调节单元18和/或驱动单元12的壳体和/或底盘单元28,其中,传感器单元14至少部分地布置在壳体和/或底盘单元28的外表面30、32上或者至少部分地形成壳体和/或底盘单元28的外表面30、32。壳体和/或底盘单元28的外表面30、32优选背离壳体和/或底盘单元28面向控制和/或调节单元18和/或驱动单元12的内侧面。优选地,传感器单元14由于布置在外表面30、32上或者由于至少部分地形成外表面30、32而面向环绕自主工作器具10的周围环境。优选地,传感器单元14至少部分地形成壳体和/或底盘单元28的外壳。传感器单元14、尤其是传感器单元14的至少一个传感面20、22、24能够例如至少部分地布置在壳体和/或底盘单元28的、尤其是构造为罩盖的壳体元件的外表面30上,或者,至少部分地形成壳体和/或底盘单元28的、尤其是构造为罩盖的壳体元件的外表面30。传感器单元14、尤其是传感器单元14的至少一个传感面26能够例如至少部分地布置在壳体和/或底盘单元28的底盘的外表面32上,或者,至少部分地形成壳体和/或底盘单元28的底盘的外表面32。替代或者附加地可设想,传感器单元14、尤其是传感器单元14的至少一个传感面(这里未详细呈现)布置在壳体和/或底盘单元28内,尤其是布置在壳体和/或底盘单元28的内侧面上。有利地,壳体和/或底盘单元28能够设置为传感器单元14的保护件。也可设想,自主工作器具10具有保护单元、例如柔性保护层,该保护单元布置在传感器单元14上并且遮盖传感器单元14,尤其是保护传感器单元14不受天气的影响,等等。
优选地,传感器单元14、尤其是传感器单元14的至少一个传感面或者多个传感面20、22、24、26覆盖或者形成壳体和/或底盘单元28的外表面30、32的至少大部分。优选地,传感器单元14、尤其是传感器单元14的至少一个传感面或者多个传感面20、22、24、26覆盖或者形成壳体和/或底盘单元28的整个外表面的、尤其是壳体和/或底盘单元28的壳体元件的整个外表面的和/或底盘的整个外表面的大于10%、尤其大于30%、优选大于50%并且特别优选大于70%。也可设想,传感器单元14、尤其是传感器单元14的至少一个传感面或者多个传感面20、22、24、26覆盖或者构造壳体元件和/或底盘的整个外表面的100%。
尤其地,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的外表面30、32上、尤其是在壳体和/或底盘单元28的外表面的大部分上并且基于借助控制和/或调节单元18来分析处理电容,能够借助控制和/或调节单元18识别出自主工作器具10与人、物体和/或动物的接触。控制和/或调节单元18优选根据传感器单元14的传感器数据确定组织特征参数。如果例如识别出与人和/或动物接触,则控制和/或调节单元18能够停止激活驱动单元18和/或加工单元36,以便避免伤害。尤其能够识别出,例如是否有儿童坐在自主工作器具10上或者依靠在其上,尤其其中,在这种识别的情况下能够执行紧急停止或者能够禁止自主工作器具10的可激活性。
尤其地,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的外表面30上、尤其是在壳体和/或底盘单元28背离加工单元36的外表面上、尤其是在壳体和/或底盘单元28的构造为罩盖的壳体元件的外表面上,基于分析处理电容和/或基于检测力特征参数,能够借助控制和/或调节单元18推断出雨滴撞击到壳体和/或底盘单元28上和/或存在雾和/或存在风(风检测)。控制和/或调节单元18能够例如在识别出下雨和/或存在雾和/或存在风的情况下中断工作过程或者延迟工作过程的开始。有利地,能够得出实际存在于工作区域中的天气的结论,有利地,该天气在计算控制策略的情况下能够被考虑。此外,能够探测到在外表面30上的物体,例如树枝或者枝叶,并且,能够时常将警报发送给自主工作器具10的用户和/或能够至少暂时禁锁自主工作器具10的运行。
优选地,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的外表面30、32上、尤其是在壳体和/或底盘单元28的外表面的大部分上并且基于分析处理电容,能够借助控制和/或调节单元18来执行自主工作器具10的脏污的检测。控制和/或调节单元18能够基于识别出自主工作器具10的脏污而指示操作者,清洁自主工作器具10将是有意义的。优选地,借助控制和/或调节单元18来确定自主工作器具10的脏污特征参数。
尤其地,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的外表面30、32上并且基于检测力特征参数,能够借助控制和/或调节单元18分析处理在自主工作器具10的运行期间的振动特征参数,该振动特征参数例如可推断出即将出现的构件缺陷方面的结论。此外,通过检测力特征参数有时也能够至少间接地检测出地面特性(隆起、上坡、下坡等),尤其是通过在工作运行和/或静止状态期间作用在传感器单元14上的重力和/或加速度。
优选地,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的外表面30、32上,基于检测靠近和/或检测力特征参数,能够借助控制和/或调节单元18来识别出符合规定地靠近或者符合规定地对接到用于给能量供应单元44充电的基站。例如,在自主工作器具10的符合规定的对接状态下,基站的限定部分贴靠在壳体和/或底盘单元28的特定的部分区域上。如果例如识别出在基站的该部分和自主工作器具10的所述部分区域之间的偏移,则控制和/或调节单元18能够引入重新驶至基站或者自主工作器具10的位置的校正。此外,借助传感器单元14能够检测到的、在基站之间的希望的接触能够用于使自主工作器具10“滑入”基站中。
优选地,传感器单元14、尤其是传感器单元14的至少一个传感面20至少部分地布置在壳体和/或底盘单元28沿主运动方向42定向的前侧面34上(参见图2和图3)。优选地,传感器单元14、尤其是传感器单元14的至少一个传感面20形成前侧面34的外表面。壳体和/或底盘单元28的前侧面34优选由壳体和/或底盘单元28的、尤其构造为罩盖的壳体元件形成。然而替代地也可设想,前侧面34由底盘独自形成或者由壳体元件和底盘共同形成。传感器单元14能够具有布置在前侧面34上的单个传感面20或者彼此间隔开分布地布置在前侧面34上的多个传感面20。
优选地,传感器单元14、尤其是传感器单元14的至少一个传感面20、26至少部分地在壳体和/或底盘单元28上布置在加工单元36的附近区域中(参见图2和图3)。优选地,传感器单元14、尤其是传感器单元14的至少一个传感面20、26至少部分地布置在壳体和/或底盘单元28面向加工单元36的侧面、尤其是下侧面上,尤其是布置在底盘的下侧面上。优选地,尤其是在至少基本上垂直于加工单元36的加工轴线48、尤其是旋转轴线延伸的平面中观察,传感器单元14、尤其是传感器单元14的至少一个传感面26至少基本上完全包围加工单元36。替代或者附加地,传感器单元14、尤其是传感器单元14的至少一个传感面布置在加工元件、尤其是切割元件上,例如切割刀具等,或者布置在加工单元48的切割元件接收部上。可设想,传感器单元14、尤其是传感器单元14的至少一个传感面20从前侧面34开始延伸到在壳体和/或底盘单元28的下侧面上的加工单元36的附近区域中,或者,传感器单元14具有至少两个彼此贴靠或者彼此间隔开的传感面20、26,其中,传感面20、26中的一个布置在前侧面34上并且传感面20、26中的另一个布置在下侧面上。也可设想,传感器单元14的布置在前侧面34上的传感面20附加地至少部分地沿着壳体和/或底盘单元28的侧壁侧面延伸。替代或者附加地,也可设想,传感器单元14具有附加的传感面22、24,所述附加的传感面布置在壳体和/或底盘单元28的侧壁侧面上。
尤其地,基于传感器单元14至少部分地布置前侧面34上和/或加工单元36的附近区域中,可检测出待切割的绿植、例如草的存在。尤其地,待切割的绿植在自主工作器具10沿着主运动方向42运动期间靠近或者接触加工单元36的前侧面34和/或所述附近区域,其中,待切割的绿植的靠近或者作用力能够通过传感器单元14来检测,尤其是基于在传感器单元14中的电容的变化来检测。根据对待切割的绿植在传感面20、26上的作用位置的检测,控制和/或调节单元18优选能够优选地确定:待切割的绿植有多长,并且例如能够调设自主工作器具10切割和/或移动速度。此外,优选地能够基于电容变化推断出:待切割的绿植究竟是否存在。优选地,检测到的数据尤其是在针对较长时间段的分析处理之后能够被控制和/或调节单元18用于适配工作过程的频率,尤其是用于改变每周/月/年的工作过程的数量等等。
有利地,基于传感器单元14至少部分地布置在加工单元36的附近区域中,尤其是在传感器单元14沿着主运动方向42观察地在壳体和/或底盘单元28的下侧面上布置在加工单元36的前方和后方的情况下,可在割草过程之后检测待切割的绿植、尤其是草是否存在。优选地,能够推断出:待切割的绿植是否已符合规定地被切割或者是否有必要重新驶过工作区域或者更换或者说再研磨加工单元14的切割元件。例如借助自主工作器具10的输出单元(这里未详细呈现)能够使操作者注意到:可能有必要更换或者说再研磨加工单元14的切割元件。
尤其地,基于传感器单元14至少部分地布置在加工单元36的附近区域中,尤其是在传感器单元14沿着主运动方向42观察地在壳体和/或底盘单元28的下侧面上布置在加工单元36的前方和后方的情况下,可检测在加工单元36的附近区域中是否存在对象16——例如球、人或者动物的躯体部分等。如果例如基于分析处理电容而识别出:对象16——例如球、人或者动物的躯体部分等——位于加工单元36的附近区域中,则控制和/或调节单元18能够例如停止激活驱动单元12和/或加工单元36,以便尤其是避免伤害或者损坏对象16。此外,基于传感器单元14至少部分地布置在加工单元36的附近区域并且基于对于对象16的作用位置的检测,优选能够确定出:对象16在自主工作器具10下方位于哪个部位和/或对象16距加工单元36的危险区域多远。如果例如借助通过控制和/或调节单元18分析处理传感器单元14的传感器数据而识别出:人或者动物的躯体部分朝着加工单元36的危险区域运动,则控制和/或调节单元18能够例如停止激活驱动单元12和/或加工单元36,以便尤其是避免伤害人或者动物的躯体部分。
优选地,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的下侧面上并且基于分析处理传感器单元14的电容的变化,能够借助控制和/或调节单元18来执行对地面的类型的检测。例如能够检测:自主工作器具10是否在潮湿的地面、具有长草的地面、由混凝土制成的地面、纯土壤等上前进。如果例如基于分析处理电容而识别出:带有激活的加工单元36的自主工作器具10在由混凝土或者石材制成的地面上运动,则控制和/或调节单元18能够例如停止激活加工单元36,以便节省能量供应单元44的能量,等等。优选地,控制和/或调节单元18根据传感器单元14的传感器数据来确定地面特征参数。
尤其地,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的下侧面上并且基于分析处理传感器单元14的电容的变化,能够借助控制和/或调节单元18来检测水障碍物、例如水坑等的存在。如果例如识别出,自主工作器具10正将驶近水障碍物中,则控制和/或调节单元18能够计算出实现绕过水障碍物或类似的控制策略。
优选地,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的下侧面上并且基于分析处理传感器单元14的电容的变化,能够借助控制和/或调节单元18来检测诸如深坑、台阶等的突然的高度水平变化。如果例如识别出:超出平均水平地跳跃式地发生电容变化,则能够推断出诸如深坑、台阶等的突然的高度水平变化,其中,控制和/或调节单元18例如能够停止激活驱动单元12。
优选地,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的下侧面上并且基于检测力特征参数,能够借助控制和/或调节单元18来执行对自主工作器具10陷入地面中的检测。如果自主工作器具10例如在沙土地或者松软的土地上运动并且如果从下侧面识别出作用力,则控制和/或调节单元18能够例如推断出:自主工作器具10已经陷在松软的地面中或者说已经陷入松软的地面中。控制和/或调节单元18能够例如停止激活驱动单元12和/或加工单元36,以便尤其是避免在自主工作器具10和/或地面上的损坏。优选地,控制和/或调节单元18根据传感器单元14的传感器数据确定地面特征参数和移动性特征参数。控制和/或调节单元18能够附加地考虑其他特征参数,例如通过测距数据或者方位定位单元46得到的速度、通过地图数据得到的地上高度等。
优选地,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的下侧面上并且基于分析处理靠近,可借助控制和/或调节单元18计算自主工作器具10的运动矢量。优选地,能够将所计算的运动矢量用于与测距数据和/或方位定位单元46的数据进行比较,尤其以便正确地确定自主工作器具10在工作区域内的位置。
优选地,传感器单元14、尤其是传感器单元14的至少一个传感面20或者多个传感面20、22、24至少部分地沿着壳体和/或底盘单元28的整个周向延伸部布置在壳体和/或底盘单元28上,尤其是布置在壳体和/或底盘单元28的外表面30、32上(参见图4)。可设想,传感器单元14具有单个连贯的、至少部分地沿着壳体和/或底盘单元28的整个周向延伸部在壳体和/或底盘单元28上延伸的传感面20,或者,传感器单元14具有多个彼此间隔开的、至少部分地沿着壳体和/或底盘单元28的整个周向延伸部在壳体和/或底盘单元28上延伸的传感面20、22、24。
有利地,基于传感器单元14至少部分地沿着壳体和/或底盘单元28的整个周向延伸部布置并且尤其是基于检测对象16在传感器单元14的至少一个传感面20、22、24上的作用位置,能够借助控制和/或调节单元18来确定:对象16从哪个方向与自主工作器具10形成接触和/或对象16的坚硬或者说柔软度。诸如树干等的硬质对象16更可能点状地作用在传感器单元14上,其中,诸如灌木丛等的软质对象16更可能面式地作用在传感器单元14上。优选地,控制和/或调节单元18基于分析处理电容的变化而适用于能够推断出对象16的材质,以便能够区分不同的对象16,例如将混凝土墙或者石墙与草或者木头区分开。控制和/或调节单元18优选能够根据传感器数据计算出控制策略,该控制策略实现了例如在可屈服的灌木丛的情况下沿着对象16滑动,或者该控制策略要求规避或者说倒退动作,以便绕过对象16。检测到的传感器数据和从中推导出的控制策略能够被控制和/或调节单元18优选地用于适配先前进行的工作区域的测绘。
自主工作器具10优选包括至少一个能够借助驱动单元12来驱动的行走或者履带机构单元38,其中,传感器单元14至少部分地布置在行走或者履带机构单元38上(参见图1至图4)。优选地,传感器单元14、尤其是传感器单元14的至少一个传感面50布置在至少一个驱动轮的外表面或者外圆周上。替代或者附加地可设想,传感器单元14、尤其是传感器单元14的至少一个传感面52布置在行走或者履带机构单元38的轮毂元件上、在行走或者履带机构单元38的轮辋元件背离壳体和/或底盘单元28的外侧面上,等等。
优选地,基于传感器单元14至少部分地布置在行走或者履带机构单元38上、尤其是在行走或者履带机构单元38的至少一个驱动轮的外表面或者外圆周上,并且基于检测力特征参数,能够借助控制和/或调节单元18来检测由自主工作器具10作用在地面上的力。如果例如识别出,由自主工作器具10作用在地面上的力小于储存在控制和/或调节单元18的存储单元中的边界值,则例如能够推断出:自主工作器具10或者至少一个驱动轮被抬起并且失去与地面的接触。此外,能够基于分析处理布置在行走或者履带机构单元38上的传感器单元14的传感器数据来检测自主工作器具10的行走速度。控制和/或调节单元18优选地能够确定移动性特征参数。
优选地,基于传感器单元14至少部分地布置在行走或者履带机构单元38上、尤其是在行走或者履带机构单元38的至少一个驱动轮的外表面或者外圆周上,并且基于检测力特征参数和/或分析处理电容,能够借助控制和/或调节单元18来检测人对自主工作器具10的抬起。也可设想,自主工作器具10具有至少一个手柄,传感器单元14至少部分地布置在该手柄上,以便分析处理人是否通过手柄握持和/或携带自主工作器具10。也可设想,基于传感器单元14至少部分地布置在壳体和/或底盘单元28的外表面30、32上,基于检测电容变化并且基于检测力特征参数,能够借助控制和/或调节单元18来推断出人抓握壳体和/或底盘单元28。附加地能够分析处理其他传感器数据——例如至少部分地布置在行走或者履带机构单元38上的传感器单元14的传感器数据、方位定位单元46的数据等,以便例如实现可靠地识别出抬高。控制和/或调节单元18能够例如在识别出抬起的情况下停止激活驱动单元12和/或加工单元36和/或输出警报信号,因为自主工作器具10例如在未经授权的情况下已被抬起等。
尤其地,基于传感器单元14至少部分地布置在行走或者履带机构单元38上、尤其在行走或者履带机构单元38的轮辋元件背离壳体和/或底盘单元28的外侧面上,并且基于检测力特征参数和/或分析处理电容,能够借助控制和/或调节单元18来实现检测自主工作器具10与对象16的接触。优选地,行走或者履带机构单元38的轮辋元件的背离壳体和/或底盘单元28的外侧面形成自主工作器具10的最外表面。有利地,能够基于检测到对象16的靠近而提前识别接触或者可能的接触。有利地,自主工作器具能够导航成在附近绕过所述对象。
此外,自主工作器具10包括至少一个用于手动输入操作者命令的输入单元40,所述操作者命令能够被控制和/或调节单元18考虑以至少用于控制和/或调节驱动单元12,其中,传感器单元14至少部分地与输入单元40一件式地构造。优选地,传感器单元14的至少一个传感面54构成输入单元40的至少一个输入元件,操作者能够借助该输入元件手动输入操作者命令。优选地,传感器单元14的构成输入单元40的至少一个输入元件的至少一个传感面54布置在壳体和/或底盘单元28的、尤其是构造为罩盖的壳体元件的背离加工单元36的侧面上、尤其是上侧面上。
优选地,基于传感器单元14至少部分地与输入单元40一件式的构型,能够执行紧急停止功能。如果例如识别出与人和/或动物接触,则借助控制和/或调节单元18来停止激活驱动单元12和加工单元36。优选地,由于传感器单元14至少部分地与输入单元40一件式的构型,能够实现大面积的操作面,其中,能够借助控制和/或调节单元18分析处理人的手势、触摸等,用于控制和/或调节自主工作器具10。
图5示出在考虑传感器单元14的传感器数据的情况下用于自动控制和/或调节自主工作器具10的方法的示意性流程。用于自动控制和/或调节自主工作器具10的方法优选包括至少一个方法步骤56,在该方法步骤中,控制和/或调节单元18考虑对象16的借助传感器单元14检测到的靠近和/或作用在传感器单元14的传感面20、22、24、26上的对象16的借助传感器单元14检测到的力特征参数,以至少用于控制和/或调节驱动单元12。在所述方法的至少一个方法步骤58中,控制和/或调节单元18根据由传感器单元14接收到的信号来控制和/或调节自主工作器具的加工单元36、尤其是割草机构和/或行走或者履带机构单元38。在所述方法的至少一个方法步骤60中,控制和/或调节单元18根据由传感器单元14接收到的信号来确定移动性特征参数。在所述方法的至少一个方法步骤62中,控制和/或调节单元18根据由传感器单元14接收到的信号来确定地面特征参数。在所述方法的至少一个方法步骤64中,控制和/或调节单元18根据由传感器单元14接收到的信号来确定自主工作器具10的脏污特征参数。在所述方法的至少一个方法步骤66中,控制和/或调节单元18根据由传感器单元14接收到的信号来确定靠近传感器单元14的传感面20、22、24、26的对象16或者对传感器单元14的传感面20、22、24、26施加力的对象16的组织特征参数。
在所述方法的其他方法步骤方面,请参阅对图1至图4中的自主工作器具10的描述,该描述也可类似地转用于所述方法,使得关于自主工作器具10的所有特征视为对用于所述方法而言也被公开。
- 自主工作器具和用于运行自主工作器具的方法
- 用于识别自主工作器具的工作区域的方法以及工作器具