基于雷达扫描与视觉覆盖的无人机侦测系统
文献发布时间:2023-06-19 10:21:15
技术领域
本发明属于无人机侦测技术领域,尤其涉及基于雷达扫描与视觉覆盖的无人机侦测系统。
背景技术
现有无人机侦测设备具有以下缺陷:
一、高空摄像侦测覆盖范围有限,虽然有的采用可旋转的摄像头,但是易发生漏侦测现象;
二、无人机降落时的支架采用弹性缓冲,弹性缓冲易出现振动现象,而且损耗大,成本高。
发明内容
发明目的:为了克服现有技术中存在的不足,本发明提供基于雷达扫描与视觉覆盖的无人机侦测系统,集雷达扫描侦测与高空摄像侦测为一体,侦测效果好。
技术方案:为实现上述目的,本发明的基于雷达扫描与视觉覆盖的无人机侦测系统,包括无人机本体,所述无人机本体底部具有侦测雷达和视觉侦测设备,所述侦测雷达及视觉侦测设备均连接无人机本体的飞控系统,且无人机本体的左、右两个侧面分别设置有气动缓冲机架,所述气动缓冲机架受所述飞控系统控制。
进一步地,所述视觉侦测设备包括两个摄像头和一个电动环形导轨,所述摄像头及电动环形导轨均连接无人机本体的飞控系统;
所述电动环形导轨安装于无人机本体的底部,其中一个所述摄像头位于电动环形导轨的中心位置,其镜头竖直朝下,另外一个所述摄像头安装于电动环形导轨上,其镜头朝向电动环形导轨的外侧并向下倾斜。
进一步地,所述气动缓冲机架包括支撑杆,以及连接于支撑杆两端的转盘和气箱;所述转盘竖向设置,所述支撑杆与转盘处于同一平面,所述支撑杆与气箱垂直,所述转盘旋转带动支撑杆、气箱同步转动;所述气箱具有锥形支撑喷气体,所述锥形支撑喷气体的小端口导通所述气箱,无人机本体降落状态下通过从所述锥形支撑喷气体向下喷出的气体实现缓冲并通过所述锥形支撑喷气体进行支撑。
进一步地,所述气动缓冲机架还包括安装板、立式轴承座、伺服电机和电动推杆;所述立式轴承座通过安装板安装于无人机本体侧面,所述转盘旋转配合设置于立式轴承座上并通过所述伺服电机驱动旋转,所述电动推杆朝向转盘水平安装于安装板上;所述转盘具有两端贯穿侧面且经过中心的定位贯穿孔,所述定位贯穿孔的一端为飞行定位端口,所述定位贯穿孔的另一端为降落定位端口,所述电动推杆插入飞行定位端口或降落定位端口。
进一步地,所述气动缓冲机架还包括充气泵,所述充气泵供气至所述气箱。
进一步地,伺服电机、电动推杆以及充气泵均通过无人机本体的飞控系统控制。
有益效果:本发明的基于雷达扫描与视觉覆盖的无人机侦测系统,有益效果如下:
1)本发明的无人机既能进行雷达扫描侦测,又能进行高空摄像侦测,覆盖全,侦测效果好,适于规模化推广;
2)本发明的气动缓冲机架灵活性高,飞行时既不影响高空摄像侦测,降落时也能进行良好的气动缓冲。
附图说明
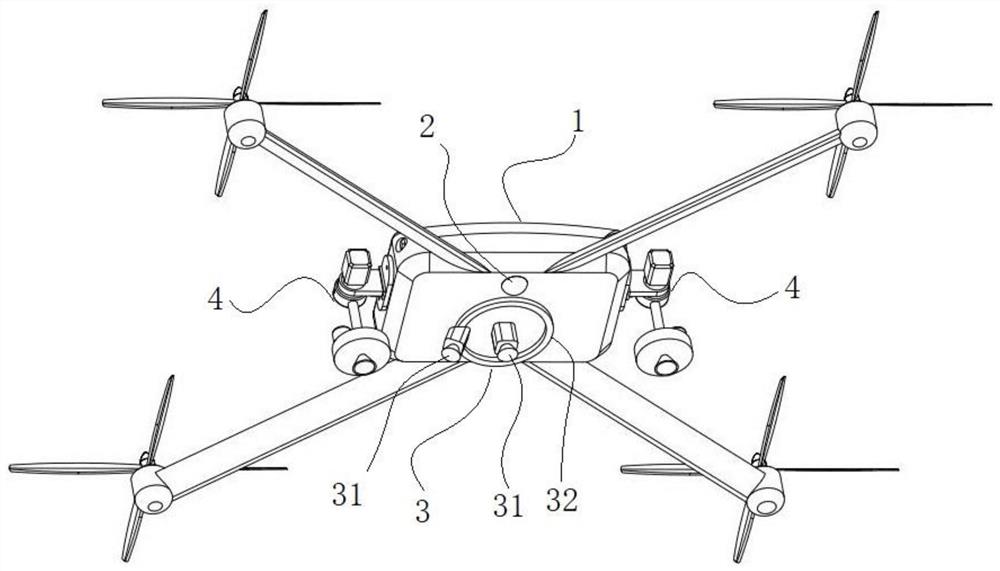
附图1为本发明的整体结构示意图;
附图2为气动缓冲机架的结构示意图一;
附图3为气动缓冲机架的结构示意图二。
具体实施方式
下面结合附图对本发明作更进一步的说明。
如附图1所示,基于雷达扫描与视觉覆盖的无人机侦测系统,包括无人机本体1,所述无人机本体1底部具有侦测雷达2和视觉侦测设备3,所述侦测雷达2及视觉侦测设备3均连接无人机本体1的飞控系统,且无人机本体1的左、右两个侧面分别设置有气动缓冲机架4,所述气动缓冲机架4受所述飞控系统控制。本发明的无人机既能进行雷达扫描侦测,又能进行高空摄像侦测,覆盖全,侦测效果好;此外,气动缓冲机架4灵活性高,飞行时既不影响高空摄像侦测,降落时也能进行良好的气动缓冲。
更为具体的,所述视觉侦测设备3包括两个摄像头31和一个电动环形导轨32,所述摄像头31及电动环形导轨32均连接无人机本体1的飞控系统。值得注意的是,所述电动环形导轨32安装于无人机本体1的底部,其中一个所述摄像头31位于电动环形导轨32的中心位置,其镜头竖直朝下,另外一个所述摄像头31安装于电动环形导轨32上,其镜头朝向电动环形导轨32的外侧并向下倾斜,节约成本的同时大大提高画面捕捉范围,从而扩大视觉覆盖侦测范围。
如附图2和附图3所示,所述气动缓冲机架4包括支撑杆41,以及连接于支撑杆41两端的转盘42和气箱43;所述气动缓冲机架4还包括充气泵48,所述充气泵48供气至所述气箱43;所述转盘42竖向设置,所述支撑杆41与转盘42处于同一平面,所述支撑杆41与气箱43垂直,所述转盘42旋转带动支撑杆41、气箱43同步转动;所述气箱43具有锥形支撑喷气体44,所述锥形支撑喷气体44的小端口导通所述气箱43,无人机本体1降落状态下通过从所述锥形支撑喷气体44向下喷出的气体实现缓冲并通过所述锥形支撑喷气体44进行支撑。采用气动反推形式进行降落缓冲,相比现有的弹簧弹性缓冲,其缓冲效果好、使用寿命长、且较为稳定。
本发明的所述气动缓冲机架4还包括安装板44、立式轴承座45、伺服电机46和电动推杆47;所述立式轴承座45通过安装板44安装于无人机本体1侧面,所述转盘42旋转配合设置于立式轴承座45上并通过所述伺服电机46驱动旋转,所述电动推杆47朝向转盘42水平安装于安装板44上;所述转盘42具有两端贯穿侧面且经过中心的定位贯穿孔420,所述定位贯穿孔420的一端为飞行定位端口420a,所述定位贯穿孔420的另一端为降落定位端口420b,所述电动推杆47插入飞行定位端口420a或降落定位端口420b。无人机具有飞行侦测与降落两个状态,具体情况分析如下:
一、飞行侦测状态
此时支撑杆41竖直向上,电动推杆47插入飞行定位端口420a中进行定位,从而使支撑杆41以及气箱43不会对摄像头31的画面捕捉造成遮挡影响;
二、降落状态
此时支撑杆41竖直向下,电动推杆47插入降落定位端口420b中进行定位,从而保证支撑杆41及气箱43的稳定性。
更为具体的,伺服电机46、电动推杆47以及充气泵48均通过无人机本体1的飞控系统控制。
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 基于雷达扫描与视觉覆盖的无人机侦测系统
- 一种基于雷达扫描与视觉覆盖的无人机侦测装置