一种用于海洋传感器的全自动投放装置
文献发布时间:2023-06-19 10:22:47
技术领域
本发明属于海洋传感器投放技术领域,具体涉及一种用于海洋传感器的全自动投放装置。
背景技术
海洋占据了地球总面积的3/4,海洋的变化关系着人类生存环境的变化,伴随着人类对海洋资源开发的逐渐深入,海洋研究显得越来越重要。海水的温度、电导率或盐度等都是海洋水体最基本的物理要素,也是海洋调查和监测中最重要的常规观测项目,它们的量值对海洋中其它物理要素,如海水的化学和生物特性、水体运动以及人类的海上活动等均有着直接或间接的重要影响,而这些数据的快速获取都离不开海洋传感器。目前国内海洋传感器的投放大多采用人工投放的方式,每次出海作业都要跟随着母船,若需要对多个传感器进行多点投放,这种投放方式显然会消耗大量的时间、人力和物力,效率极为低下,同时由于人工的参与会使传感器入水的姿态、角度、速度不一,使传感器的测量精度大打折扣。
随着自动化产业的发展,一种小型的水面自主航行载体——无人艇渐渐进入人们的视野,无人艇在海洋传感器的自主投放上有着巨大的优势,首先无人艇可以非常灵活的在海面上航行,若使用无人艇搭载传感器投放装置进行海洋传感器的自动投放,这将大幅度提升传感器的投放效率,大大降低人力、物力、财力的投入,使传感器的性能发挥到极致。所以研发一种海洋传感器的全自动投放装置有着重要的意义。
发明内容
为了解决海洋传感器投放时遇到的问题,本发明提供了一种能够自动释放、扩展性强、能够实现对多枚传感器的多点投放、能够大幅度提升海洋传感器的投放效率,大大降低人力、物力和财力的投入,同时能够使投放的海洋传感器的投放姿态保持一致的用于海洋传感器的全自动投放装置。
基于上述目的,本发明通过如下技术方案实现:
一种用于海洋传感器的全自动投放装置,包括传感器释放系统,传感器释放系统下设有与无人艇相连接的装置支架机构,传感器释放系统上设有与传感器释放系统相配合的固定挡板机构,固定挡板机构包括固定挡板;传感器释放系统包括多组并排排列的传感器释放机构和释放控制机构,任一组传感器释放机构与固定挡板固定连接。
优选地,任一组传感器释放机构包括一对上下并排连接的传感器释放器,任一传感器释放器与释放控制机构相连接;任一传感器释放器包括倾斜设置的空心圆筒,空心圆筒的出口端上设有磁控释放结构,磁控释放结构包括设置在空心圆筒上的控制电磁铁和与空心圆筒出口相配合的滑动挡板,滑动挡板为铁磁性材料制造,滑动挡板与控制电磁铁相配合;滑动挡板两侧均设有与滑动挡板滑动连接的支撑滑杆;支撑滑杆的一端设有与支撑滑杆固定连接的电机固定板,另一端设有与支撑滑杆固定连接的滑杆固定板,滑杆固定板与空心圆筒相配合。
优选地,磁控释放结构还包括设置在电机固定板上的电机底板,电机底板上设有步进电机,步进电机的活动端上设有滚珠丝杠,滚珠丝杠上设有与滚珠丝杠活动连接的调节螺母,调节螺母远离步进电机的一侧设有与滑动挡板相配合的复位滑块,复位滑块与调节螺母固定连接;滑动挡板靠近步进电机的一侧设有复位弹簧,复位弹簧与电机固定板固定连接。
优选地,支撑滑杆靠近滑动挡板的一侧设有滑杆槽;滑动挡板两侧均设有与滑杆槽相配合的挡板凸起;复位滑块两侧均设有与滑杆槽相配合的滑块凸起;滑杆固定板与设置在空心圆筒上的L型支撑座固定连接,L型支撑座通过设置在空心圆筒上的固定板支撑座固定在空心圆筒上;固定板支撑座上设有与控制电磁铁相连接的磁铁固定板。
优选地,空心圆筒的入口端上设有L型固定座和与L型固定座相配合的凸型固定座;L型固定座、L型支撑座上均设有连接固定孔;凸型固定座、固定板支撑座上均设有支撑固定孔。
优选地,释放控制机构包括设置在无人艇上的微处理器,释放控制机构与无人艇控制系统相配合,微处理器与步进电机、控制电磁铁电性连接。
优选地,装置支架机构包括多组与传感器释放机构相配合的H型支撑架,任一H型支撑架包括一对脚座,其中一个脚座轴心上设有长直杆,另一个脚座轴心上设有短直杆;短直杆通过直杆连接杆与长直杆固定连接;短直杆顶端设有与长直杆相连接的侧杆。
优选地,相邻的H型支撑架通过支撑连接杆相连接;支撑连接杆与直杆连接杆固定连接;侧杆上设有与支撑固定孔相配合的支架固定孔;任一脚座上设有一对与长直杆、短直杆相配合的L型连接板。
优选地,固定挡板上设有与支撑固定孔相配合的挡板固定孔;固定挡板上设有一对相对固定挡板轴对称的长方形孔。
优选地,侧杆所在平面与一对脚座所在平面呈30°~60°夹角。
与现有技术相比,本发明的有益效果如下:
(1)本发明通过设置传感器释放系统、装置支架机构和固定挡板机构,从而实现对海洋传感器的全自动投放;通过设置释放控制机构,能够实现对海洋传感器的自动释放,通过设置多组并排排列的传感器释放机构使得本发明具有扩展性强的特点,能够实现对多枚海洋传感器的多点投放,能够大幅度提升海洋传感器的投放效率,大大降低人力、物力和财力的投入,从而实现海洋传感器的定点、定位、定量投放的目的。
(2)通过设置一对上下并排的的传感器释放器实现传感器释放机构的功能;空心圆筒的设置能够对海洋传感器进行暂储,方便随时对海洋传感器进行释放;磁控释放结构能够通过释放控制机构实现对空心圆筒内海洋传感器的全自动投放目的,使得海洋传感器的投放效率提升,大大降低人力、物力和财力的投入,同时能够使投放的海洋传感器的投放姿态保持一致;控制电磁铁和滑动挡板相配合,能够实现对空心圆筒内海洋传感器的控制,方便实现海洋传感器的投放;滑动挡板为铁磁性材料制造,方便控制电磁铁对其进行控制;支撑滑杆能够对滑动挡板进行支撑,使滑动挡板能够沿预设方向滑动;在电机固定板设置电机底板能够方便的固定步进电机,使得步进电机能够带动滚珠丝杠转动,转动的滚珠丝杠能够带动复位滑块运动,从而实现带动滑动挡板移动的目的;滑杆固定板方便对支撑滑杆进行固定,使得滑动挡板能够对空心圆筒内的海洋传感器进行阻挡或释放;调节螺母的设置方便滚珠丝杠通过与调节螺母的啮合,从而实现滚珠丝杠带动复位滑块移动;复位弹簧能够带动滑动挡板复位,从而实现释放海洋传感器的目的。
(3)在支撑滑杆靠近滑动挡板的一侧设置滑杆槽,方便滑动挡板、滑块凸起滑动,并且能够对滑动挡板、滑块凸起起到导向作用,防止滑动挡板、滑块凸起脱落;挡板凸起的设置能够方便滑动挡板在滑杆槽内运动,防止滑动挡板运动时脱落滑杆槽;滑块凸起的设置能够方便复位滑块在滑杆槽内运动,防止复位滑块运动时脱落滑杆槽;L型支撑座与滑杆固定板固定连接,方便对滑杆固定板进行固定,从而实现固定支撑滑杆的目的;固定板支撑座与L型支撑座相配合,能够固定在空心圆筒上,实现固定磁控释放结构的目的;磁铁固定板的设置方便对控制电磁铁进行固定,方便实现磁吸控制。
(4)L型固定座和凸型固定座相互配合,能够实现对空心圆筒入口端的固定作用,通过连接固定孔和支撑固定孔,能够方便的将传感器释放器固定在固定挡板和装置支架机构上。
(5)在无人艇上设置微处理器,方便通过控制无人艇控制系统实现对本全自动投放装置控制的目的;也可以通过预设微处理器程序,实现微处理器与无人艇控制系统的相互配合,通过对步进电机和控制电磁铁的控制,实现对传感器释放器的操控,实现全自动投放海洋传感器的目的。
(6)装置支架机构通过多组相连接的H型支撑架实现,能够分别与传感器释放机构固定连接;脚座能够分别对长直杆和短直杆进行稳定支撑,方便通过脚座上的脚座固定孔将脚座固定在无人艇上,方便实现无人艇带动本全自动投放装置实现海洋传感器的投放动作;通过在一对脚座上分别设计长直杆和短直杆,能够实现侧杆倾斜的目的;方便海洋传感器从空心圆筒中滑出;直杆连接杆的设计方便配合侧杆实现对长直杆和短直杆固定目的;侧杆的设计方便对传感器释放器进行固定工作。
(7)相邻的H型支撑架通过支撑连接杆连接,能够将H型支撑架组合成装置支架机构,方便实现对传感器释放机构固定的目的;支撑连接杆与直杆连接杆固定连接,能够有效利用直杆连接杆两端分别与短直杆、长直杆相连接的优势,通过支撑连接杆将相邻的直杆连接杆进行连接,使得支撑连接杆、直杆连接杆、一对脚座形成稳固的四角固定关系,能够稳固的将相邻H型支撑架连接在一起,防止本全自动投放装置在使用时产生晃动等影响海洋传感器投放的问题产生;支架固定孔与支撑固定孔相配合,能够方便传感器释放器固定在侧板上。
(8)挡板固定孔的设计方便固定挡板与凸型固定座、固定板支撑座固定连接,方便固定挡板实现对传感器释放机构固定的目的,减少传感器释放机构的晃动,实现更好投放海洋传感器的目的;一对长方形孔的设计能够减轻固定挡板的重量,使得固定挡板能够在有效固定传感器释放机构的前提下,减轻自身重量,使得本全自动投放装置能够随无人艇航行。
(9)侧杆所在平面与一对脚座所在平面呈30°~60°夹角,方便放置在空心圆筒内的海洋传感器通过磁控释放结构滑入海水中,实现对海水的监测。
综上,本发明通过设置相互配合的传感器释放系统、装置支架机构和固定挡板机构,从而实现对海洋传感器的全自动投放;传感器释放系统通过设置多组并排排列的传感器释放机构,使得本发明具有扩展性强的特点,能够实现对多枚海洋传感器的定点投放,这将大幅度提升海洋传感器的投放效率,大大降低人力、物力和财力的投入,同时由于采用了相同的传感器释放器,使传感器的投放姿态保持一致,能够将传感器的性能充分发挥出来,最终实现海洋传感器的定点、定位、定量、全自动投放的目的。
附图说明
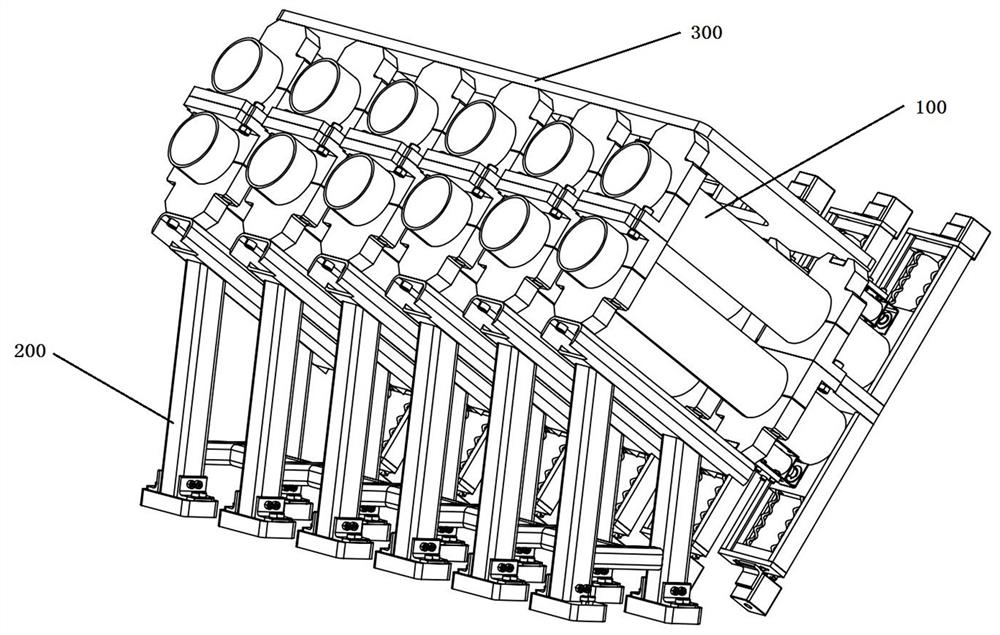
图1是实施例1中本发明的结构示意图;
图2是实施例1中本发明的结构示意图;
图3是实施例1中传感器释放器的结构示意图;
图4是实施例1中装置支架机构的结构示意图;
图5是实施例1中固定挡板的结构示意图。
图中,100、传感器释放系统,200、装置支架机构,300、固定挡板机构,101、磁控释放结构,102、凸型固定座,103、L型固定座,104、空心圆筒,105、滑杆固定板,106、固定板支撑座,107、磁铁固定板,108、控制电磁铁,109、电机底板,110、步进电机,111、复位滑块,112、复位弹簧,113、滚珠丝杠,114、支撑滑杆,115、滑动挡板,116、调节螺母,117、L型支撑座,118、连接固定孔,119、支撑固定孔,120、支撑固定孔,121、电机固定板,122、连接固定孔,201、L型连接板,202、脚座,203、直杆连接杆,204、长直杆,205、短直杆,206、侧杆,207、支撑连接杆,301、挡板固定孔,302、长方形孔,303、固定挡板。
具体实施方式
以下通过具体实施例对本发明作进一步详细说明,但并不限制本发明的范围。
实施例1:
一种用于海洋传感器的全自动投放装置,其结构如图1-图5所示,包括传感器释放系统100,传感器释放系统100下设有与无人艇相连接的装置支架机构200,传感器释放系统100上设有与传感器释放系统100相配合的固定挡板机构300,固定挡板机构300包括固定挡板303;传感器释放系统100包括多组并排排列的传感器释放机构和释放控制机构,任一组传感器释放机构与固定挡板303固定连接。任一组传感器释放机构包括一对上下并排连接的传感器释放器,任一传感器释放器与释放控制机构相连接;任一传感器释放器包括倾斜设置的空心圆筒104,空心圆筒104的出口端上设有磁控释放结构101,磁控释放结构101包括设置在空心圆筒104上的控制电磁铁108和与空心圆筒104出口相配合的滑动挡板115,滑动挡板115为铁磁性材料制造,滑动挡板115与控制电磁铁108相配合;滑动挡板115两侧均设有与滑动挡板115滑动连接的支撑滑杆114;支撑滑杆114的一端设有与支撑滑杆114固定连接的电机固定板121,另一端设有与支撑滑杆114固定连接的滑杆固定板105,滑杆固定板105与空心圆筒104相配合。磁控释放结构101还包括设置在电机固定板121上的电机底板109,电机底板109上设有步进电机110,步进电机110的活动端上设有滚珠丝杠113,滚珠丝杠113上设有与滚珠丝杠113活动连接的调节螺母116,调节螺母116远离步进电机110的一侧设有与滑动挡板115相配合的复位滑块111,复位滑块111与调节螺母116固定连接;滑动挡板115靠近步进电机110的一侧设有复位弹簧112,复位弹簧112与电机固定板121固定连接。
支撑滑杆114靠近滑动挡板115的一侧设有滑杆槽;滑动挡板115两侧均设有与滑杆槽相配合的挡板凸起;复位滑块111两侧均设有与滑杆槽相配合的滑块凸起;滑杆固定板105与设置在空心圆筒104上的L型支撑座117固定连接,L型支撑座117通过设置在空心圆筒104上的固定板支撑座106固定在空心圆筒104上;固定板支撑座106上设有与控制电磁铁108相连接的磁铁固定板107。空心圆筒104的入口端上设有L型固定座103和与L型固定座103相配合的凸型固定座102;L型固定座103、L型支撑座117上均设有连接固定孔118、122;凸型固定座102、固定板支撑座106上均设有支撑固定孔119、120。释放控制机构包括设置在无人艇上的微处理器,释放控制机构与无人艇控制系统相配合,微处理器与步进电机110、控制电磁铁108电性连接。装置支架机构200包括多组与传感器释放机构相配合的H型支撑架,任一H型支撑架包括一对脚座202,其中一个脚座202轴心上设有长直杆204,另一个脚座202轴心上设有短直杆205;短直杆205通过直杆连接杆203与长直杆204固定连接;短直杆205顶端设有与长直杆204相连接的侧杆206。相邻的H型支撑架通过支撑连接杆207相连接;支撑连接杆207与直杆连接杆203固定连接;侧杆206上设有与支撑固定孔119、120相配合的支架固定孔;任一脚座202上设有一对与长直杆204、短直杆205相配合的L型连接板201。固定挡板303上设有与支撑固定孔119、120相配合的挡板固定孔301;固定挡板303上设有一对相对固定挡板303轴对称的长方形孔302。侧杆206所在平面与一对脚座202所在平面呈30°~60°夹角。
安装时,一、传感器释放系统100的组装和固定;首先,组装传感器释放机构,使用螺栓通过L型固定座103上的连接固定孔118、L型支撑座117上的连接固定孔122将一对传感器释放器固定在一起,固定完成后,其次,将传感器释放机构固定到装置支架机构200上,使用螺栓通过凸型固定座102上的支撑固定孔119、固定板支撑座106上的支撑固定孔120将传感器释放机构固定到侧杆206的支架固定孔上,固定完成后,磁控释放结构101靠近短直杆205,空心圆筒104入口端靠近长直杆204,其中直杆连接杆203起到加固短直杆205和长直杆204的作用,支撑连接杆207起到加固相邻H型支撑架的作用,一对L型连接板201起到加固短直杆205、长直杆204与脚座202的作用;将所有的传感器释放机构全部固定完成后;二、固定挡板机构300的固定;将固定挡板303放置在合适位置上,使得挡板固定孔301与支撑固定孔119、120一一对应,使用螺栓将支撑固定孔119、120与固定孔进行固定连接,固定完成后,一对长方形孔302正对传感器释放系统100;首先将本全自动投放装置安装到无人艇合适的位置上,通过脚座202上的固定孔将本装置进行固定,安装完成后 ,由于侧杆206所在平面与一对脚座202所在平面呈30°~60°夹角,空心圆筒104的出口端低于入口端,传感器释放器进行海洋传感器释放后能够正常落入海水中,并将释放控制机构与无人艇控制系统进行联动,使得能够通过无人艇控制系统对微处理器进行控制;安装完成后,由于侧杆206所在平面与一对脚座202所在平面呈30°~60°夹角,因此,空心圆筒104处于倾斜状态下,方便海洋传感器自行滑出空心圆筒104;航线时,可以为无人艇设定航线路线或者通过远程操控对无人艇航线进行操控;投放海洋传感器时,可以根据航线路线设定海洋传感器自动投放的位置或者通过对无人艇的控制实现海洋传感器的投放;本发明的的工作方式分为整体复位和释放传感器两个阶段,使用时,首先使用无人艇航控板下达复位指令,所有步进电机110开始正转,进而带动滚珠丝杠113转动,滚珠丝杠113的转动带动调节螺母116远离步进电机110,复位滑块111随调节螺母116远离步进电机110,滑块凸起开始在滑杆槽内运动,复位滑块111的移动会带动滑动挡板115向滑杆固定板105侧移动,当步进电机110转动一段时间后,滑动挡板115到达指定位置,步进电机110停止转动,此时,通过微处理器的控制,控制电磁铁108通电,控制电磁铁108产生磁力,滑动挡板115被控制电磁铁108牢牢的吸住,滑动挡板115固定在滑杆槽内;此时,微处理器控制步进电机110开始反向旋转,反转的步进电机110带动调节螺母116和复位滑块111向电机固定板121侧移动,当调节螺母116和复位滑块111回到初始位置后,整体复位动作完成;当需要无人艇出海进行传感器投放作业时,会预先在空心圆筒104中放入海洋传感器,并对海洋传感器进行编号,并将编号预设至微处理器内,当无人艇到达预设的投放点后,微处理器切断对应编号海洋传感器所在的传感器释放器中控制电磁铁108的电能供应,控制电磁铁108失去对滑动挡板115的吸附,滑动挡板115在复位弹簧112的作用下向电机固定板121侧移动,挡板凸起在滑杆槽内滑动,使得滑动挡板115沿滑杆槽复位至初始位置,该传感器释放器中空心圆筒104内的海洋传感器因自身的重力自动滑落水中,传感器释放完成,当无人艇航行至其他测量点后,按照上述方式将对应编号的海洋传感器放置的海水内,从而实现全自动海洋传感器投放的动作;其中L型支撑座117起到连接和固定滑杆固定板105的目的;磁铁固定板107起到将控制电磁铁108固定到固定板支撑座106上的作用;电机底板109方便步进电机110固定至电机固定板121上;支撑滑杆114起到配合滑动挡板115运动的作用,方便本发明实现自动投放海洋传感器。
实施例2:
一种用于海洋传感器的全自动投放装置,与实施例1的不同之处在于:侧杆206所在平面与一对脚座202所在平面呈30°夹角。
实施例3:
一种用于海洋传感器的全自动投放装置,与实施例1的不同之处在于:侧杆206所在平面与一对脚座202所在平面呈35°夹角。
实施例4:
一种用于海洋传感器的全自动投放装置,与实施例1的不同之处在于:侧杆206所在平面与一对脚座202所在平面呈40°夹角。
实施例5:
一种用于海洋传感器的全自动投放装置,与实施例1的不同之处在于:侧杆206所在平面与一对脚座202所在平面呈45°夹角。
实施例6:
一种用于海洋传感器的全自动投放装置,与实施例1的不同之处在于:侧杆206所在平面与一对脚座202所在平面呈50°夹角。
实施例7:
一种用于海洋传感器的全自动投放装置,与实施例1的不同之处在于:侧杆206所在平面与一对脚座202所在平面呈55°夹角。
实施例8:
一种用于海洋传感器的全自动投放装置,与实施例1的不同之处在于:侧杆206所在平面与一对脚座202所在平面呈60°夹角。
实施例9:
一种用于海洋传感器的全自动投放装置,与实施例1的不同之处在于:固定挡板机构300还包括敷设在传感器释放系统100上的防水膜,防水膜能够减少无人艇航行时海水对传感器释放系统100的侵蚀。
实施例10:
一种用于海洋传感器的全自动投放装置,与实施例1的不同之处在于:空心圆筒104入口端均设有与空心圆筒104活动连接的固定盖,能够防止杂物进入空心圆筒104内。
以上所述仅为本发明的较佳实施例而已,但不仅限于上述实例,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种用于海洋传感器的全自动投放装置
- 一种用于水下精确投放海洋传感器的轨迹优化方法及设备