一种气泡膜包装机设备
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及商品包装机设备技术领域,尤其涉及一种针对包装柱状体物品的气泡膜包装机设备。
背景技术
随着电子商务的迅速发展,网购已经成为一种新的时尚趋势,消费者对在网上购买的商品的完好程度有着越来越高的要求和期望,因此很多商家对商品进行派送前,会选择气泡膜对商品进行包装,这样能够在长途运输过程中,对商品起到防震减震的保护作用。但由于人工包装效率底下,动作重复性大,繁琐且费时费力,在互联网经济快速发展的当下,商家急需一种高效率的气泡膜包装机械装置,以实现使用气泡膜对物品进行包装,保证商品在运输过程中不被损坏。
目前,市场上所公开的关于气泡膜包装机的机械设备,大多数都得人工辅助进行作业,自动化程度低,包装物品的效率低;且对物品包装后,使用胶带密封的紧密性存在局限性,物品在运输过程中气泡膜容易松散。
发明内容
针对现有技术存在的不足,本发明提供一种有效提高物品包装效率的气泡膜包装机设备,可以使用气泡膜自动包装物品,降低人工成本,保证物品在运输过程中不被损坏。
为实现上述包装目的,本发明提供以下技术方案:一种气泡膜包装机设备,它包括拉伸切割模块、吸取放置模块、包裹缠绕模块、机械手抓取模块和密封模块;所述吸取放置模块的真空吸盘吸取气泡膜放置到物品上,包裹缠绕模块中的上平台装置下降直至压住待包装的物品,包裹缠绕模块中的下平台装置接着旋转,使气泡膜从拉伸切割模块的两个滚筒间的缝隙中不断拉出,并缠绕包裹在物品上;所述机械手抓取模块的机械手爪移动并抓取物品,同时拉伸切割模块的电热刀从上往下割断气泡膜;机械手爪将物品移动到密封模块,通过密封模块的两个封箱机机芯对物品进行密封,完成包装。
进一步设计,所述拉伸切割模块包括第一滚筒、第二滚筒、固定光杆、第一步进电机、第一联轴器、第一滚珠丝杠、电热刀、滑杆和卷装的气泡膜,尺寸相同的第一滚筒和第二滚筒竖直安装在装置支架的侧端,两滚筒间的间隙根据气泡膜的厚度调整,防止气泡膜在持续拉出时发生翻折;所述固定光杆安装于两滚筒的外侧,用于放置卷装的气泡膜,卷装的气泡膜可以绕固定光杆转动;所述第一步进电机安装于装置支架上端,第一步进电机的输出轴通过第一联轴器带动第一滚珠丝杠,第一滚珠丝杠上安装有电热刀;所述滑杆平行于第一滚珠丝杠安装在装置支架上,电热刀通过与滑杆的连接可以做上下往复运动。
如此设计,所述拉伸切割模块的固定光杆装上卷装的气泡膜,在包裹物品的过程中,气泡膜从两个滚筒之间的缝隙被稳定拉出;第一步进电机通过第一联轴器和第一滚珠丝杠,在滑杆的导向下,带动电热刀进行竖直方向上的切割运动。
进一步的,所述吸取放置模块包括线性模组、第二步进电机、第三步进电机、第二联轴器、第三联轴器、第二滚珠丝杠、第一支架、真空吸盘、第一喷嘴和第二喷嘴,所述线性模组水平安装在装置支架的前侧,第二步进电机的输出轴通过第二联轴器带动线性模组,由线性模组实现第一支架做水平方向的线性运动;所述第一支架安装在线性模组上,所述第三步进电机安装于第一支架的底部,第三步进电机的输出轴通过第三联轴器与第二滚珠丝杠的一端连接,实现第一支架做上下运动;第一支架的外侧安装有圆形的真空吸盘和两个喷嘴,所述真空吸盘的材质为丁腈橡胶,用于吸附气泡膜;所述第一喷嘴和第二喷嘴规格相同,用于喷出气流,将气泡膜压制在物品上。
如此设计,所述吸取放置模块的主要功能是实现真空吸盘和两个喷嘴在水平和竖直方向上的移动。第二步进电机连接第二联轴器,第二联轴器连接线性模组实现真空吸盘和两个喷嘴水平方向上的线性移动;第三步进电机通过第三联轴器连接第二滚珠丝杠实现真空吸盘和两个喷嘴竖直方向的移动。真空吸盘内产生负压吸附气泡膜,将气泡膜移动到物品处后,真空吸盘停止真空吸取,两个喷嘴喷出的气流将气泡膜压制在物品上。
进一步的,所述包裹缠绕模块包括上平台装置和下平台装置,所述上平台装置布置在装置支架的上部,可做升降移动,用于压紧物品;所述下平台装置用于放置物品,安装在上平台装置的正下方,其上放置的物品在上平台装置的压力下产生摩擦力,与下平台装置一起转动。
如此设计,物品放置在下平台装置上,真空吸盘吸附气泡膜放置到物品上,可升降的上平台装置下降压住物品和气泡膜,下平台装置转动,从而带动物品转动,持续拉取出气泡膜包裹缠绕物品。
进一步的, 所述包裹缠绕模块的上平台装置包括第四步进电机、第三滚珠丝杠、第四滚珠丝杠、第一同步带、同步轮和圆形平台,所述第四步进电机安装在上平台装置的上端,其输出轴与第三滚珠丝杠连接;所述第四滚珠丝杠与第三滚珠丝杠规格相同,平行安装在装置支架上,两者由第一同步带和同步轮相连接,从而实现两滚珠丝杠的同步转动;所述圆形平台上的轴段通过间隙配合连接在上平台装置下端,可以随物品转动。
如此设计,第三滚珠丝杠和第四滚珠丝杠由第一同步带和同步轮实现同步转动,第四步进电机带动两个滚珠丝杠转动,进而实现上平台装置的圆形平台的升降移动。上平台装置的圆形平台压紧物品后,可在摩擦力作用下和物品一起随下平台装置的圆台形平台转动。
进一步的,所述包裹缠绕模块的下平台装置包括电机、第二同步带、第一带轮、第二带轮和圆台形平台,所述电机布置于下平台装置的下端,且电机通过第二同步带、第一带轮和第二带轮与圆台形平台的轴端连接;所述圆台形平台的小端置于上侧,大端连接有轴段,物品放置在小端上,防止气泡膜与下平台发生缠绕。
如此设计,所述下平台装置由电机提供动力,在上平台装置的圆形平台压紧物品之后,通过同步带带动下平台装置的圆台形平台和物品一起转动。
进一步的,所述机械手抓取模块包括机械手爪、齿轮、齿条、第五步进电机、第六步进电机、第四联轴器、第五滚珠丝杠、轴承、固定板和底座,所述第五步进电机安装在固定板上,其输出轴通过齿轮带动齿条,实现机械手爪的伸缩运动;所述第六步进电机安装在底座上,其输出轴通过第四联轴器与第五滚珠丝杠连接,第五滚珠丝杠的另一端通过轴承支承于底座上,实现机械手爪在前后方向的移动;所述固定板安装在底座的上方,所述底座安装在装置支架的右侧端。
如此设计,通过第五步进电机和齿轮齿条传动可以完成机械手爪的伸缩移动,第六步进电机连接第四联轴器,带动第五滚珠丝杠实现机械手爪的前后方向的水平运动;气泡膜包裹完物品、并用电热刀切断气泡膜后,机械手爪抓取物品,将物品移动到密封模块。
进一步的,所述密封模块包括第二支架、第一封箱机机芯和第二封箱机机芯,所述第二支架由两个相互平行的定位轨组成,竖直安装在装置支架上;规格相同的第一封箱机机芯和第二封箱机机芯分别安装于第二支架的上、下侧,且安装方向相反,下侧第二封箱机机芯固定在定位轨上,高度与下平台装置的圆台形平台一致;两封箱机机芯之间的竖直距离,可根据物品的高度,通过调整上侧的第一封箱机机芯的位置,在第二支架中作上下调整。
如此设计,机械手爪夹持包裹好的物品,移动经过密封模块的两封箱机机芯之间,已包裹好的物品的上下端被胶带密封好并割断胶带,完成包装并移出物品。
相较于现有技术,本发明的有益效果是:本发明提供的气泡膜包装机设备主要包括拉伸切割模块、吸取放置模块、包裹缠绕模块、机械手抓取模块和密封模块,通过模块化设计实现了使用气泡膜对物品进行自动包装,并对包裹好的物品进行密封;整个过程中使用机械手爪对物品进行抓取移动,保证了物品在不同工作模块的位置的切换,节省人力成本,使用效果好,利于推广。
附图说明
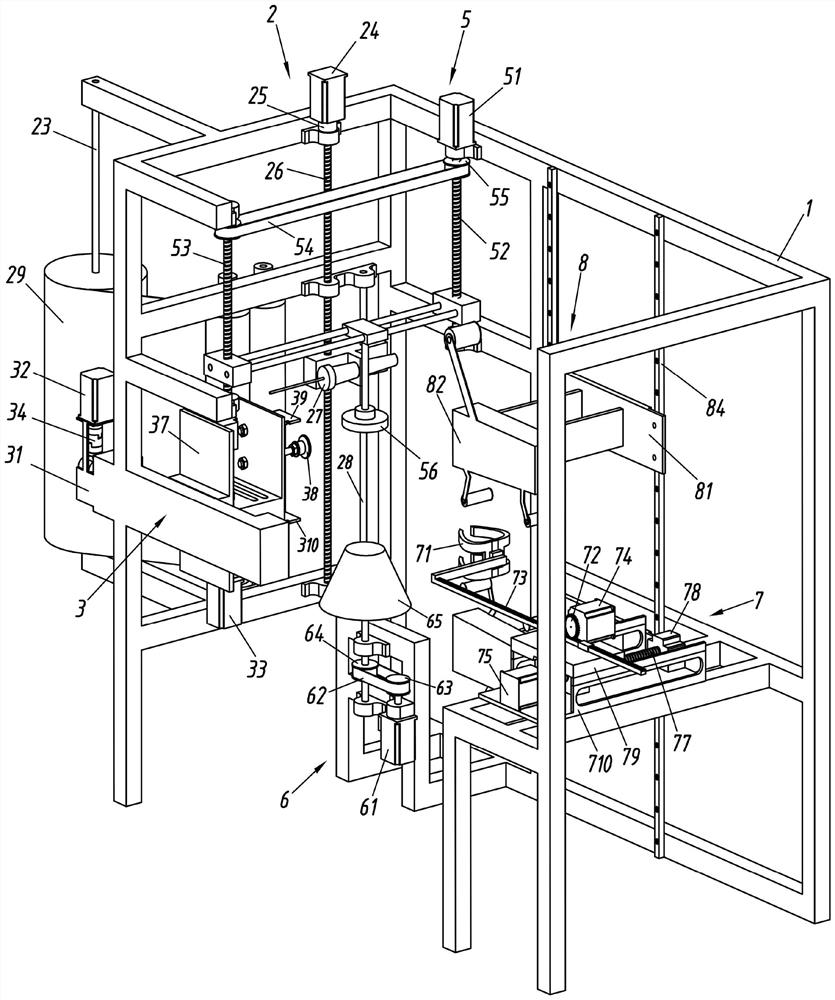
图1为本发明气泡膜包装机设备的总体结构轴测图;
图2为本发明气泡膜包装机设备的总体结构俯视图;
图3为本发明拉伸切割模块的示意图;
图4为本发明吸取放置模块的示意图;
图5为本发明包裹缠绕模块的示意图;
图6为本发明机械手抓取模块和密封模块的示意图。
图中:装置支架1、拉伸切割模块2、第一滚筒21、第二滚筒22、固定光杆23、第一步进电机24、第一联轴器25、第一滚珠丝杠26、电热刀27、滑杆28、卷装的气泡膜29、吸取放置模块3、线性模组31、第二步进电机32、第三步进电机33、第二联轴器34、第三联轴器35、第二滚珠丝杠36、第一支架37、真空吸盘38、第一喷嘴39、第二喷嘴310、包裹缠绕模块4、 上平台装置5、第四步进电机51、第三滚珠丝杠52、第四滚珠丝杠53、第一同步带54、同步轮55、圆形平台56、下平台装置6、电机61、第二同步带62、第一带轮63、第二带轮64、圆台形平台65、机械手抓取模块7、机械手爪71、齿轮72、齿条73、第五步进电机74、第六步进电机75、第四联轴器76、第五滚珠丝杠77、轴承78、固定板79、底座710、密封模块8、第二支架81、第一封箱机机芯82、第二封箱机机芯83、定位轨84。
具体实施方式
下面结合附图对本发明做进一步的说明。
如图1和图2所示,本发明提供了一种气泡膜包装机设备,它包括拉伸切割模块2、吸取放置模块3、包裹缠绕模块4、机械手抓取模块7和密封模块8;所述吸取放置模块3的真空吸盘38吸取气泡膜放置到物品上,包裹缠绕模块4中的上平台装置5下降直至压住待包装物品,包裹缠绕模块中的下平台装置6接着旋转,使气泡膜从拉伸切割模块2的两个滚筒间的缝隙中不断拉出,并缠绕包裹在物品上;所述机械手抓取模块7的机械手爪71移动并抓取物品,同时拉伸切割模块2的电热刀27会从上往下割断气泡膜;机械手爪71将物品移动到密封模块8,通过密封模块8的两个封箱机机芯对物品进行密封,完成包装,机械手爪71复位。
如图1和图3所示,拉伸切割模块2包括第一滚筒21、第二滚筒22、固定光杆23、第一步进电机24、第一联轴器25、第一滚珠丝杠26、电热刀27、滑杆28和卷装的气泡膜29,尺寸相同的第一滚筒21和第二滚筒22竖直安装在装置支架1的侧端,两滚筒间的间隙根据气泡膜的厚度调整,气泡膜从两个滚筒间的间隙中稳定拉出,防止气泡膜在持续拉出时发生翻折,保证气泡膜旋转包裹物品;所述固定光杆23安装于两滚筒的外侧,用于放置卷装的气泡膜29,卷装的气泡膜29可以绕固定光杆23转动;所述第一步进电机24安装于装置支架1上端,第一步进电机24的输出轴通过第一联轴器25带动第一滚珠丝杠26,第一滚珠丝杠26上安装有电热刀27;所述滑杆28平行于第一滚珠丝杠26安装在装置支架1上,电热刀27通过与滑杆28的连接可以做上下往复运动,对气泡膜进行竖直方向上的切割动作。
如图1和图4所示,吸取放置模块3包括线性模组31、第二步进电机32、第三步进电机33、第二联轴器34、第三联轴器35、第二滚珠丝杠36、第一支架37、真空吸盘38、第一喷嘴39和第二喷嘴310, 所述线性模组31水平安装在装置支架1的前侧,第二步进电机32的输出轴通过第二联轴器34带动线性模组31,由线性模组31实现第一支架37做水平方向的线性运动;所述第一支架37安装在线性模组31上,所述第三步进电机33安装于第一支架37的底部,第三步进电机33的输出轴通过第三联轴器35与第二滚珠丝杠36的一端连接,实现第一支架37做上下运动;第一支架37的外侧安装有圆形的真空吸盘38和两个喷嘴,所述真空吸盘38的材质为丁腈橡胶,用于吸附气泡膜;所述第一喷嘴39和第二喷嘴310规格相同,用于喷出气流,将气泡膜压制在物品上。
如图1、图2和图5所示,包裹缠绕模块4包括上平台装置5和下平台装置6,所述上平台装置5布置在装置支架1的上部,可做升降移动,用于压紧物品;所述下平台装置6用于放置物品,安装在上平台装置5的正下方;真空吸盘38吸附气泡膜放置到物品上后,上平台装置5下降压住物品,物品在上平台装置5的压力下产生摩擦力,与下平台装置6一起转动,持续拉取出气泡膜包裹缠绕物品。
如图1和图5所示,包裹缠绕模块4的上平台装置5包括第四步进电机51、第三滚珠丝杠52、第四滚珠丝杠53、第一同步带54、同步轮55和圆形平台56,所述第四步进电机51安装在上平台装置5的上端,其输出轴与第三滚珠丝杠52连接;所述第四滚珠丝杠53与第三滚珠丝杠52规格相同,平行安装在装置支架1上,两者由第一同步带54和同步轮55相连接,实现两滚珠丝杠的同步转动,进而控制圆形平台56的升降移动;圆形平台56上的轴段通过间隙配合连接在上平台装置5的下端,可以在摩擦力作用下和物品一起随下平台装置6的圆台形平台65转动。
如图1和图5所示,包裹缠绕模块4的下平台装置6包括电机61、第二同步带62、第一带轮63、第二带轮64和圆台形平台65,所述电机61布置于下平台装置6的下端,且电机61通过第二同步带62、第一带轮63和第二带轮64与圆台形平台65的轴端连接,在上平台装置5的圆形平台56压紧物品之后,带动圆台形平台65和物品转动;圆台形平台65的小端置于上侧,大端连接轴段,物品放置在小端上,可以防止气泡膜与其发生缠绕。
如图1和图6所示,机械手抓取模块7包括机械手爪71、齿轮72、齿条73、第五步进电机74、第六步进电机75、第四联轴器76、第五滚珠丝杠77、轴承78、固定板79和底座710,所述第五步进电机74安装在固定板79上,其输出轴通过齿轮72带动齿条73,可以实现机械手爪71做伸缩移动;所述第六步进电机75安装在底座710上,其输出轴通过第四联轴器76与第五滚珠丝杠77连接,第五滚珠丝杠77的另一端通过轴承78支承于底座710上,可使机械手爪71在前后方向进行水平移动;所述固定板79安装在底座(710)的上方,所述底座710安装在装置支架1的右侧端;气泡膜包裹完物品并用电热刀27切断气泡膜后,机械手爪71夹持物品,将物品移动到密封模块8。
如图1和图6所示,密封模块8包括第二支架81、第一封箱机机芯82和第二封箱机机芯83,所述第二支架81包括两个相互平行的定位轨84,竖直安装在装置支架1上;所述第一封箱机机芯82和第二封箱机机芯83的规格相同,分别安装于第二支架81的上、下侧,安装方向相反,下侧的第二封箱机机芯83固定在定位轨84上,高度与下平台装置6的圆台形平台65一致;两封箱机机芯之间的竖直距离,可根据物品的高度,通过调整上侧的第一封箱机机芯82的位置,在第二支架81中作上下调整;机械手爪71夹持包裹好的物品,移动经过密封模块8的两封箱机机芯之间,物品的上下端就会被胶带密封好并割断胶带,完成包装。
工作时:首先,把待包装的物品放置在下平台装置6的圆台形平台65上,拉取卷装的气泡膜29的一端穿过第一滚筒21和第二滚筒22之间的间隙;接着,开启真空发生器使真空吸盘38内部形成负压,吸附气泡膜并将其移动到物品处后,真空吸盘38停止真空吸附,第一喷嘴39和第二喷嘴310喷出气流将气泡膜压制在物品上;其次,上平台装置5的圆形平台56下降压住待包装的物品,下平台装置6的圆台形平台65转动,从第一滚筒21和第二滚筒22间的缝隙中不断拉出气泡膜缠绕包裹在物品上;然后,机械手爪71移动并夹持物品, 同时开动电热刀27纵向割断气泡膜;最后,机械手爪71移动物品经过密封模块8的两个封箱机机芯之间,对已包裹的物品进行密封并割断胶带,完成包装并移出物品。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种气泡膜包装机设备
- 一种气泡膜包装机的热封切刀装置