控制装置、系统及方法
文献发布时间:2023-06-19 10:51:07
技术领域
本发明涉及一种控制装置、系统及方法。
背景技术
一直以来,已知一种飞行器,它在预先设定的飞行路径中自主飞行(例如,专利文献1)。
背景技术文献
专利文献
专利文献1:国际公开第2018/155700号
发明内容
[发明要解决的问题]
然而,专利文献1的系统中,飞行器在自主飞行后需要着陆,但并不会在着陆前就基于所要着陆的对象地域的表面状态来判定飞行器能否着陆,因此,根据该表面状态,存在飞行器无法着陆的情况。
本发明是鉴于所述方面而完成的,其目的在于提供一种控制装置、系统及方法,能够在着陆前基于对象地域的表面状态来判定飞行器能否着陆到该对象地域。
[解决问题的技术手段]
为了达成所述目的,本发明第1态样的控制装置的特征在于具备:
行驶体控制部,使行驶体在对象地域中行驶;
获取部,获取表示所述行驶体在所述对象地域中行驶期间所述对象地域的表面状态的状态信息;以及
判定部,基于所获取的所述状态信息,判定飞行器能否着陆到所述对象地域。
[发明的效果]
根据本发明的控制装置、系统及方法,能够在着陆前基于对象地域的表面状态来判定飞行器能否着陆到该对象地域。
附图说明
图1是表示本发明实施例的配送系统的一构成例的系统构成图。
图2是表示被覆体的一外观例的外观构成图。
图3是表示移动终端的一构成例的硬件构成图。
图4是表示配送系统具备的控制装置的一构成例的硬件构成图。
图5是表示配送系统具备的控制装置所执行的搬运控制处理的一例的流程图。
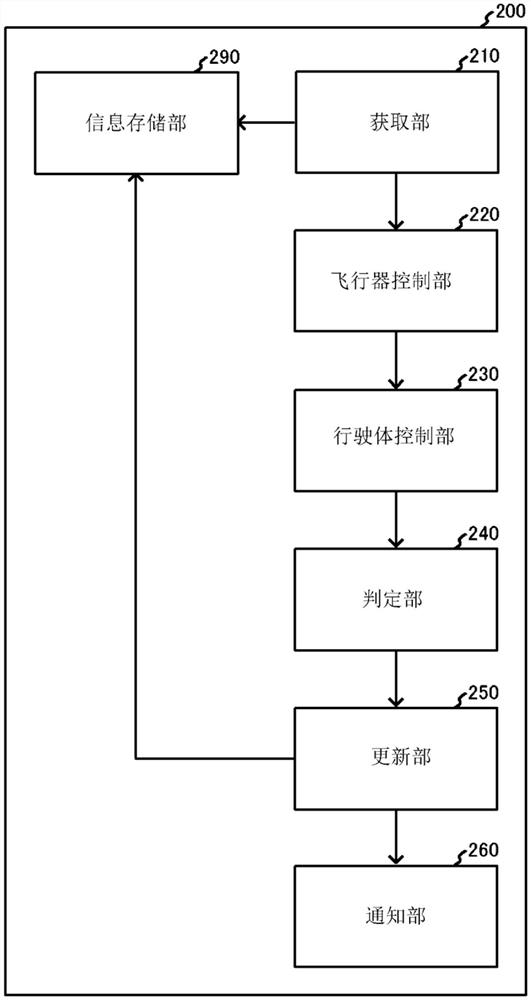
图6是表示配送系统具备的控制装置所具功能的一例的功能框图。
图7是表示配送系统具备的控制装置所存储航空站表格的一例的图。
图8是表示行驶体及搬运用飞行器的一外观例的外观构成图。
图9是表示行驶体具备的控制装置的一构成例的硬件构成图。
图10是表示搬运用飞行器具备的控制装置的一构成例的硬件构成图。
图11是表示搬运用飞行器所执行的飞行控制处理的一例的流程图。
图12是表示搬运用飞行器、连接搬运用飞行器与行驶体的金属线、以及行驶体所行驶的行驶路径的关系的一例的图。
图13是表示配送系统具备的控制装置所执行的使用判定处理的一例的流程图。
图14是表示配送系统具备的控制装置所执行的适应性判定处理的一例的流程图。
图15是表示被覆体所具有的花纹的变化的一例的图。
图16A是表示被覆体与由被覆体覆盖的表面的关系的一例的图。
图16B是表示表现出被覆体的花纹所产生的变化的变化值的一例的图。
图16C是表示在被覆体之上行驶的行驶体的姿势的一例的图。
图17是表示配送系统具备的控制装置所执行的配送控制处理的一例的流程图。
图18是表示配送用飞行器的一外观例的外观构成图。
图19是表示配送用飞行器所执行的交接控制处理的一例的流程图。
图20是表示被覆体所具有的花纹间的实际距离与水平方向距离的关系的一例的图。
具体实施方式
<实施例>
以下,一边参照附图,一边对本发明的实施例进行说明。
本发明的实施例的配送系统1具备:如图1所示的被覆体110,具有标示这是飞行器进行起飞/着陆的场所(以下称为航空站)的标记,覆盖用作航空站的对象地域;以及移动终端190,将要求该对象地域用作航空站的请求经由因特网IN进行发送。
另外,配送系统1设置在配送业者的营业部,且具备接收该请求的控制装置200,所述配送业者是在预先规定的地域内进行物品配送的业者,且根据该请求被要求将对象地域用作航空站。
进而,配送系统1具备:行驶体300,为了指定出被要求用作航空站的对象地域的表面状态,在控制装置200的控制下,在覆盖该对象地域的被覆体110之上行驶;以及搬运用飞行器400,将行驶体300搬运到该对象地域。控制装置200使行驶体300在被覆体110之上行驶的目的在于,针对因被覆体110覆盖而无法直接观测的该表面状态,通过利用行驶体300的重量使被覆体110与该表面密接,从而让控制装置200能够间接地进行观测。
进而,配送系统1具备配送用飞行器500,在控制装置200基于间接观测到的对象地域的表面状态,判定将该对象地域用作航空站的情况下,该配送用飞行器500将物品配送至该对象地域。
管理对象地域且想要在该对象地域内从配送用飞行器500处接收物品的管理者例如在向该对象地域配送物品的配送业者的营业部购入被覆体110,该被覆体110描绘有标示这是航空站的标记。
被覆体110是如图2所示的一边为r米的正方形塑料片。当将被覆体110所具有的1个顶点设为基准顶点vm,且将通过该基准顶点vm的两边中的一边设为基准第1边sf时,被覆体110上描绘有线状花纹pf1及pf2,所述线状花纹pf1及pf2与基准第1边sf平行,且与基准第1边sf的距离分别为r/3、及2r/3。另外,当将通过基准顶点vm的两边之中与第1边sf不同的边设为基准第2边ss时,被覆体110上描绘有线状花纹ps1及ps2,所述线状花纹pf1及pf2与基准第2边ss平行,且与基准第2边ss的距离分别为r/3、及2r/3。将这些线状花纹pf1及pf2以及ps1及ps2组合而成的格子状花纹描绘在被覆体110上的目的在于,将花纹作为在被覆体110上行驶的行驶体300的行驶路径来使用。
购入描绘有格子状花纹的被覆体110的管理者在以被覆体110描绘有花纹的面为上,将被覆体110铺在对象地域的表面后,通过在被覆体110所具有的4个顶点附近穿入固定销,而将被覆体110固定于对象地域。然后,管理者对移动终端190执行以下操作:使其发送要求将该对象地域用作航空站的请求。
移动终端190具备如图3所示的CPU(Central Processing Unit,中央处理器)191、RAM(Random Access Memory,随机存取存储器)192、ROM(Read Only Memory,只读存储器)193a、快闪存储器193b、数据通信电路194a、声音通信电路194b、视频卡195a、显示装置195b、输入装置195c、GPS(Global Positioning System,全球定位系统)电路196、扬声器199a、及麦克风199b。
CPU191通过执行ROM193a或快闪存储器193b中保存的程序,来进行移动终端190的整体控制。RAM192在由CPU191执行程序时,暂时存储被视为处理对象的数据。
ROM193a及快闪存储器193b存储有各种程序。另外,快闪存储器193b还存储有执行程序所用的各种数据或保存数据的表格。移动终端190也可以具备硬盘来代替快闪存储器193b。
数据通信电路194a是NIC(Network Interface Card,网卡),例如依据LTE(LongTerm Evolution,长期演进技术)及5G(5th Generation,第五代)等通信标准,与连接于因特网IN的未图示基站进行使用电波的数据通信。如此,移动终端190的数据通信电路194a与连接于因特网IN的控制装置200进行数据通信。声音通信电路194b与未图示基站进行使用电波的声音通信。
视频卡195a基于从CPU191输出的数字信号渲染(rendering)图像,并且将表示渲染后图像的图像信号输出。显示装置195b是EL(Electroluminescence,电致发光)显示器,根据从视频卡195a输出的图像信号来显示图像。移动终端190可具备PDP(Plasma DisplayPanel,等离子体显示板)或LCD(Liquid Crystal Display,液晶显示器)来代替EL显示器。输入装置195c是按钮及触摸面板中的任一种以上,供输入与使用移动终端190的管理者的操作相应的信号。
GPS电路196接收从GPS卫星发出的GPS信号,基于所接收的GPS信号计测表示移动终端190位置的纬度及经度,并将表示计测出的纬度及经度的信号输出。
扬声器199a根据CPU191所输出的信号来输出声音,麦克风199b输入表示周围声音的信号。
当移动终端190的输入装置195c输入与管理者的操作相应的信号时,CPU191就会获取从GPS电路196输出的信号。接着,CPU191生成以下请求:包含所获取信号所示的表示移动终端190的纬度的信息及表示移动终端190的经度的信息,要求将处于该纬度及该经度的对象地域用作航空站。然后,CPU191将所生成的请求以控制装置200为接收地而向数据通信电路194a输出,数据通信电路194a将请求发送给控制装置200。
控制装置200是服务器,具备如图4所示的CPU201、RAM202、ROM203a、硬盘203b、数据通信电路204a、视频卡205a、显示装置205b、及输入装置205c。控制装置200所具备的CPU201、RAM202、ROM203a、视频卡205a、显示装置205b、及输入装置205c的构成及功能与图3所示移动终端190所具备的CPU191、RAM192、ROM193a、视频卡195a、显示装置195b、及输入装置195c的构成及功能相同。输入装置205c可以是键盘、鼠标、触摸板、及按钮中的任一种以上。
控制装置200所具备的硬盘203b存储有各种程序、及执行各种程序所用的各种数据或保存有数据的表格。控制装置200也可以具备快闪存储器来代替硬盘203b。
控制装置200所具备的数据通信电路204a是NIC,例如依据LTE及5G等通信标准,与连接于因特网IN的移动终端190、搬运用飞行器400、及配送用飞行器500以无线进行数据通信。
当控制装置200的数据通信电路204a接收到要求将对象地域用作航空站的请求时,控制装置200的CPU201就执行如图5所示的搬运控制处理,即,使搬运用飞行器400向对象地域搬运行驶体300。由此,CPU201作为如图6所示的获取部210、及飞行器控制部220发挥功能,所述获取部210从数据通信电路204a获取接收到的请求,所述飞行器控制部220进行以下控制,即,使搬运用飞行器400将行驶体300搬运至处于所获取的请求中包含的纬度及经度的对象地域。
另外,硬盘203b作为存储如图7所示的航空站表格的信息存储部290发挥功能,所述航空站表格中保存有被用作航空站的对象地域的相关数据。图7的航空站表格中,配对保存有表示对象地域纬度的信息、表示对象地域经度的信息、及表示是否将该对象地域用作航空站的使用标志。
当开始执行图5所示的搬运控制处理时,获取部210从数据通信电路204a获取请求(步骤S01),从而获取请求中包含的表示对象地域纬度的信息及表示对象地域经度的信息。
接着,获取部210将所获取的表示纬度的信息、表示经度的信息、及表示不将处于该纬度及该经度的对象地域用作航空站的使用标志配对保存在图7的航空站表格中(步骤S02)。保存表示不将该对象地域用作航空站的使用标志的原因在于,尚未判定是否将该对象地域用作航空站。
接着,飞行器控制部220进行以下控制,即,使搬运用飞行器400将行驶体300搬运至对象地域。为了进行该控制,飞行器控制部220生成包含表示对象地域纬度的信息及表示对象地域经度的信息且命令飞行至该对象地域的飞行命令,将所生成的飞行命令以搬运用飞行器400为接收地而向数据通信电路204a输出(步骤S03)。然后,数据通信电路204a将飞行命令发送给搬运用飞行器400之后,飞行器控制部220结束搬运控制处理的执行。
由搬运用飞行器400搬运的行驶体300是如图8所示的无人地面车辆,具备:底盘310,具备包括车轮301及302在内的多个车轮;及摄像装置320,以使未图示透镜的光轴朝向底盘310前方的状态设置在底盘310的前表面。本说明书的说明中,例如使摄像装置320等摄像装置的光轴朝向例如底盘310的前方等指定方向这一操作包括变更该光轴以使该摄像装置的拍摄范围内至少包含位于该指定方向上的被摄体的一部分。
另外,行驶体300具备搭载于底盘310的控制装置380,控制装置380基于摄像装置320输出的图像,以一边避开障碍物一边行驶的方式驱动分别内置于多个车轮中的未图示马达。
摄像装置320是数字式立体摄影机,根据从控制装置380输出的信号拍摄行驶体300的前方,并将拍摄所得的彼此间具有视差的2张图像输出至控制装置380。摄像装置320将彼此间具有视差的2张图像输出至控制装置380的目的在于,供控制装置380基于视差指定出位于行驶体300前方的障碍物在三维空间内的位置坐标及尺寸等。
控制装置380具备如图9所示的CPU381、RAM382、ROM383a、快闪存储器383b、数据通信电路384b、检测部387、输入输出端口388、及驱动电路389。控制装置380所具备的CPU381、RAM382、ROM383a、及快闪存储器383b的构成及功能与图3所示移动终端190所具备的CPU191、RAM192、ROM193a、及快闪存储器193b的构成及功能相同。
数据通信电路384b是NIC,经由未图示缆线或以无线与搬运用飞行器400进行数据通信。
检测部387是姿势传感器,检测作为行驶体300的行进方向的前方向与水平面所成的最小角度,以作为表示行驶体300的姿势的姿势角度,并将表示所检测出的姿势角度的信号输出至CPU381。检测部387在行驶体300的行进方向是从水平方向至铅直上方向的斜上方向的情况下检测正的姿势角度,在行驶体300的行进方向是从水平方向至铅直下方向的斜下方向的情况下检测负的姿势角度。
输入输出端口388连接于与设置在底盘310前表面的摄像装置320连接的未图示缆线,将CPU381所输出的信号输出至摄像装置320,将摄像装置320所输出的2张图像输入至CPU381。
驱动电路389连接于与多个未图示马达分别连接的缆线,并根据CPU381输出的信号驱动该多个马达,该多个马达使包括车轮301及302在内的多个车轮分别旋转。
另外,行驶体300在底盘310的上表面具备固定金属件390,该固定金属件390将一端连接于搬运用飞行器400的金属线W的另一端加以固定。因此,行驶体300的CPU381在由搬运用飞行器400吊下至对象地域之后,当数据通信电路384b从搬运用飞行器400接收到命令行驶的行驶命令时,就将用以按照所接收的行驶命令在对象地域中行驶的控制信号输出至驱动电路389。
经由金属线W物理连接的搬运用飞行器400是无人机,具备如图8所示的控制装置410,控制装置410在下表面具备将金属线W进行上卷及下卷的绞车405。控制装置410控制绞车405的上卷及下卷。
绞车405具备:滚筒405a,供卷绕金属线W;支撑部件405b,将从滚筒405a的两侧面向外侧沿大致水平方向突出的突出部进行轴支;以及未图示马达,使滚筒405a向将金属线W上卷的上卷方向及将金属线W下卷的下卷方向旋转。
另外,搬运用飞行器400具备从控制装置410的前表面向右前方及左前方突出的螺旋桨臂421及422、以及从控制装置410的后表面向左后方及右后方突出的螺旋桨臂423及424。进而,搬运用飞行器400具备分别设置在螺旋桨臂421~424末端的螺旋桨431~434、及在控制装置410的控制下使螺旋桨431~434旋转的未图示马达。
进而,搬运用飞行器400具备支撑脚443,该支撑脚443从控制装置410的下表面向下方突出,支撑控制装置410。支撑脚443的铅直方向的长度被设计为,比行驶体300的铅直方向长度长出预先规定的长度。将支撑脚443如此设定的目的在于,防止搬运用飞行器400着陆到对象地域时行驶体300撞到对象地域的表面。
此外,搬运用飞行器400具备:摄像装置451,设置在控制装置410的上表面,光轴朝向搬运用飞行器400的前方;以及摄像装置452,设置在控制装置410的下表面,光轴朝向搬运用飞行器400的铅直下方向。摄像装置451及452是数字式立体摄影机,根据从控制装置410输出的信号进行拍摄,并将拍摄所得的彼此间具有视差的2张图像输出至控制装置410。
摄像装置451将通过拍摄搬运用飞行器400的前方向所获得的2张图像输出至控制装置410的目的在于,供控制装置410基于视差指定出位于搬运用飞行器400前方的障碍物在三维空间内的位置坐标及尺寸等。
另外,摄像装置452将通过拍摄铅直下方向所获得的2张图像输出至控制装置410的目的在于,供控制装置410基于视差指定出从搬运用飞行器400至地面或地板的距离即高度。
控制装置410具备如图10所示的CPU411、RAM412、ROM413a、快闪存储器413b、第1数据通信电路414a、第2数据通信电路414b、GPS电路416、输入输出端口418、及驱动电路419。
搬运用飞行器400所具备的控制装置410的CPU411、RAM412、ROM413a、快闪存储器413b、及GPS电路416的构成及功能与图3所示移动终端190所具备的CPU191、RAM192、ROM193a、快闪存储器193b、及GPS电路196的构成及功能相同。
第1数据通信电路414a及第2数据通信电路414b是NIC,第1数据通信电路414a例如依据LTE及5G等通信标准,与经由因特网IN连接的控制装置200以无线进行数据通信。第2数据通信电路414b与行驶体300经由未图示缆线或以无线进行数据通信。
输入输出端口418连接于与图8所示的摄像装置451及452分别连接的未图示缆线,将CPU411所输出的信号分别输出至摄像装置451及452,将摄像装置451及452所输出的图像输入至CPU411。
驱动电路419连接于未图示缆线,所述缆线分别连接于使图8所示的绞车405的滚筒405a旋转的未图示马达以及使螺旋桨431~434旋转的未图示马达。驱动电路419根据CPU411输出的信号,驱动使滚筒405a旋转的未图示马达及使螺旋桨431~434旋转的未图示马达。
当搬运用飞行器400的第1数据通信电路414a从控制装置200接收到命令飞行至对象地域的飞行命令时,搬运用飞行器400的CPU411就执行如图11所示的飞行控制处理,该飞行控制处理是控制使螺旋桨431~434旋转的未图示马达以遵照飞行命令来飞行。
当开始执行飞行控制处理时,搬运用飞行器400的CPU411从第1数据通信电路414a获取飞行命令(步骤S11),从而获取所获取的飞行命令中包含的表示对象地域纬度的信息及表示对象地域经度的信息。接着,搬运用飞行器400的CPU411基于从GPS电路416输出的信号,指定出搬运用飞行器400的纬度及经度。
然后,搬运用飞行器400的CPU411例如从以下未图示局部路径表格中读取多个记录,所述局部路径表格中预先保存有道路及河川等可供搬运用飞行器400移动的局部路径的相关信息。局部路径表格预先保存在快闪存储器413b中,且局部路径表格的各记录中预先配对保存有局部路径的起始节点的纬度及经度、该局部路径的终结节点的纬度及经度、以及作为该局部路径边缘的长度。
搬运用飞行器400的CPU411使用所指定的搬运用飞行器400的纬度及经度、分别保存于所读入的多个记录中的作为局部路径的边缘的长度以及节点的纬度及经度、以及对象地域的纬度及经度,来执行例如迪杰斯特拉算法等路径搜索算法。由此,CPU411算出从放置搬运用飞行器400的营业部到被要求用作航空站的对象地域为止的最短整体路径,并将所算出的整体路径决定为飞行路径(步骤S12)。
接着,搬运用飞行器400的CPU411为了使得能在飞行路径中顺行,而从GPS电路416获取信号,并生成用以进行以下飞行的控制信号,该飞行将缩小所获取的信号表示的搬运用飞行器400的纬度及经度与飞行路径中包含的多个未通过节点中最近节点的纬度及经度的差异。然后,CPU411将生成的控制信号输出至驱动使螺旋桨431~434旋转的未图示马达的驱动电路419(步骤S13)。接着,搬运用飞行器400的CPU411在存在未通过节点期间,从自GPS电路416获取信号的处理起重复所述处理。
然后,当不再存在未通过节点时,搬运用飞行器400的CPU411判断为搬运用飞行器400已到达对象地域。接着,CPU411生成到达报告,并将生成的到达报告以控制装置200为接收地而向第1数据通信电路414a输出,该到达报告包含表示对象地域纬度的信息及表示对象地域经度的信息,告知搬运用飞行器400已到达该对象地域(步骤S14)。
搬运用飞行器400的第1数据通信电路414a将告知已到达对象地域的到达报告发送给控制装置200之后,从控制装置200接收吊下命令,该吊下命令是命令一边在对象地域上空飞行一边将行驶体300吊下至对象地域。
然后,搬运用飞行器400的CPU411从第1数据通信电路414a获取吊下命令(步骤S15),并遵照所获取的吊下命令,从快闪存储器413b中读取表示预先规定的高度H的信息。预先规定的高度H是光轴朝向搬运用飞行器400的铅直下方向的搬运用飞行器400的摄像装置452的视角中包含覆盖对象地域的被覆体110整体的高度的最小值。接着,CPU411生成用以在对象地域的上空以高度H盘旋飞行或回旋飞行的控制信号并将其输出至驱动电路419。
接着,搬运用飞行器400的CPU411为了使行驶体300吊下至对象地域,生成以使行驶体300下降距离H的方式使绞车405的滚筒405a向下卷方向旋转的控制信号并将其输出至驱动电路419(步骤S16)。
然后,CPU411生成以将金属线W进一步下卷距离L的方式使绞车405的滚筒405a旋转的控制信号并将其输出至驱动电路419。搬运用飞行器400将金属线W进一步下卷距离L的目的在于,防止与行驶体300相连的金属线W妨碍行驶体300在对象地域中的行驶。
该距离L可以是任意距离,只要长于以下的值即可,所述值是如图12所示有着具有高度H的长度的对边与具有长度r的邻边的直角三角形的斜边长度(r
然后,搬运用飞行器400的CPU411生成告知已将行驶体300吊下至对象地域表面的吊下报告,并将所生成的吊下报告以控制装置200为接收地而向第1数据通信电路414a输出(步骤S17)。
搬运用飞行器400的第1数据通信电路414a在将吊下报告发送给控制装置200之后,接收命令在搬运用飞行器400飞行期间使行驶体300在对象地域中行驶的行驶命令。
搬运用飞行器400的CPU411当从第1数据通信电路414a获取行驶命令时,遵照行驶命令,直至第1数据通信电路414a接收到命令停止行驶的行驶停止命令期间,将用以在对象地域上空以高度H盘旋飞行或回旋飞行的控制信号持续输出至驱动电路419。如此,搬运用飞行器400在行驶体300行驶期间持续盘旋飞行或回旋飞行。
然后,搬运用飞行器400的CPU411通过将所获取的行驶命令以行驶体300为接收地而向第2数据通信电路414b输出,而转达行驶命令(步骤S18)。
在本实施例中,行驶命令是使在描绘在被覆体110上的线状花纹pf1、pf2、ps1、及ps2分别表示的4条行驶路径中行驶的命令。因此,当图9所示的行驶体300的数据通信电路384b接收到行驶命令时,行驶体300的CPU381为了使摄像装置320拍摄铺在行驶体300前方的被覆体110,而经由输入输出端口388向摄像装置320输出命令拍摄的信号。
接着,行驶体300的CPU381从摄像装置320获取2张拍摄图像,并从所获取的2张图像算出视差。然后,CPU381使用所算出的视差,指定出花纹pf1所表示的未行驶的第1路径中包含的多个点在三维空间内的位置坐标。指定出位置坐标的多个点包含如图2所示的花纹pf1与基准第2边ss、花纹ps1、花纹ps2以及和基准第2边ss对向的边ss'的交点,即点p1~p4。
接着,CPU381将用以使用所指定的点p1~p4的位置坐标按预先规定的速度依次通过点p1~p4的控制信号经由驱动电路389输出至使包括车轮301及302在内的多个车轮旋转的多个未图示马达。
然后,行驶体300的CPU381将用以依次通过点p5~p8的控制信号输出至驱动电路389,该点p5~p8是花纹pf2所表示的未行驶的第2路径中包含的点,且是花纹pf2与基准第2边ss、花纹ps1、花纹ps2及边ss'的交点。
同样地,行驶体300的CPU381输出用以依次通过点p9、点p2、点p6及p10的控制信号,所述点p9、点p2、点p6及p10是花纹ps1所表示的未行驶的第3路径中包含的点,其中,点p9是花纹ps1与基准第1边sf的交点,p10是花纹ps1与和基准第1边sf对向的边sf'的交点。另外,同样地,CPU381输出用以依次通过点p11、点p3、点p7及点p12的控制信号,所述点p11、点p3、点p7及点p12是花纹ps2所表示的未行驶的第4路径中包含的点,其中,点p11是花纹ps2与基准第1边sf的交点,点p12是花纹ps2与边sf'的交点。
行驶体300在被覆体110之上行驶期间,行驶体300的CPU381按预先规定的周期,获取从检测部387输出的信号。接着,CPU381每当获取该信号时,就将所获取的该信号所表示的表现行驶体300的姿势角度的姿势信息以搬运用飞行器400为接收地而向数据通信电路384b输出。此外,所谓行驶体300在被覆体110之上行驶期间,行驶体300未必要连续行驶,行驶体300可在被覆体110之上暂时停止。
每当搬运用飞行器400的第2数据通信电路414b从行驶体300接收到姿势信息时,搬运用飞行器400的CPU411就从第2数据通信电路414b获取姿势信息,例如获取OS(Operating System,操作系统)所管理的系统日期时间来作为检测出行驶体300的姿势的日期时间。另外,CPU411将所获取的表现日期时间的日期时间信息与姿势信息以控制装置200为接收地而向第1数据通信电路414a输出。
另外,搬运用飞行器400的CPU411在行驶体300在被覆体110之上行驶期间,通过按预先规定的周期将命令拍摄的信号输出至光轴朝向搬运用飞行器400的铅直下方向的摄像装置452,而使摄像装置452按预先规定的周期拍摄行驶体300所在的被覆体110。另外,CPU411每当从摄像装置452获取表示拍摄所得的图像的图像信息时,就获取OS所管理的系统日期时间来作为利用拍摄获得图像的日期时间,即拍摄日期时间。另外,CPU411将图像信息与表示拍摄日期时间的日期时间信息以控制装置200为接收地而向第1数据通信电路414a输出(步骤S19)。
然后,当搬运用飞行器400的第1数据通信电路414a从控制装置200接收到行驶停止命令时,搬运用飞行器400的CPU411就将行驶停止命令输出至第2数据通信电路414b,由此将行驶停止命令转达给行驶体300(步骤S20)。当行驶体300的数据通信电路384b接收到行驶停止命令时,行驶体300的CPU381就遵照行驶停止命令,停止输出用以行驶的控制信号。
接着,当搬运用飞行器400的第1数据通信电路414a从控制装置200接收到命令一边飞行一边将行驶体300从对象地域吊起的吊起命令时,搬运用飞行器400的CPU411就从第1数据通信电路414a获取吊起命令(步骤S21)。然后,CPU411遵照所获取的吊起命令,生成用以在对象地域上空以高度H持续盘旋飞行或回旋飞行的控制信号与使绞车405将行驶体300从对象地域吊起的控制信号,并输出至驱动电路419(步骤S22)。
然后,当搬运用飞行器400的第1数据通信电路414a从控制装置200接收到命令返回营业部的返回命令时,搬运用飞行器400的CPU411就从第1数据通信电路414a获取返回命令(步骤S23)。然后,CPU411遵照所获取的返回命令,将用以在飞行路径中逆行返回营业部的控制信号输出至驱动电路419之后(步骤S24),结束飞行控制处理的执行。
当图4所示的控制装置200的数据通信电路204a接收到图11的步骤S14中输出的到达报告时,控制装置200的CPU201就执行如图13所示的使用判定处理,即,判定是否将搬运用飞行器400到达的对象地域用作航空站。
在本实施例中,进行以下说明:控制装置200的CPU201在判定配送用飞行器500可着陆到对象地域的情况下,判定将对象地域用作航空站。所谓配送用飞行器500可着陆到对象地域,并不仅指可着陆到对象地域,还指配送用飞行器500可安全着陆到对象地域。所谓配送用飞行器500可安全着陆到对象地域,意味着配送用飞行器500着陆时完全不存在倒下的可能性或低于预计的可能性。
另外,在本实施例中,控制装置200的CPU201在对象地域的表面特性适合配送用飞行器500着陆的情况下,判定配送用飞行器500能安全着陆到对象地域。表面特性包括该表面的凹凸的所述大小、所述倾斜的所述大小、及所述柔软度。因此,所谓对象地域的表面特性适合配送用飞行器500着陆,包括表面凹凸小、表面倾斜平缓、及表面坚硬,以至于配送用飞行器500着陆到对象地域时完全不存在配送用飞行器500倒下的可能性或者低于预计的可能性。
通过执行图13的使用判定处理,控制装置200的CPU201作为如图6所示的行驶体控制部230发挥功能,该行驶体控制部230使行驶体300在由被覆体110覆盖的对象地域中行驶。
另外,CPU201作为判定部240发挥功能,该判定部240基于行驶体300在对象地域中行驶期间所检测出的行驶体300的姿势角度与行驶体300驶过的被覆体110的变化,判定配送用飞行器500能否着陆到该对象地域。
进而,控制装置200的CPU201作为更新部250发挥功能,该更新部250是在判断配送用飞行器500可着陆到对象地域的情况下,在图7的航空站表格中,将与表示该对象地域纬度的信息及表示该对象地域经度的信息配对保存的使用标志,更新为表示将该对象地域用作航空站的使用标志。
此外,控制装置200的CPU201作为通知部260发挥功能,该通知部260将判定是否将对象地域用作航空站所得的结果通知给移动终端190。
当开始执行图13的使用判定处理时,控制装置200的获取部210从数据通信电路204a获取到达报告(步骤S31),从所获取的到达报告中获取表示搬运用飞行器400到达的对象地域的纬度的信息及表示该对象地域经度的信息。
接着,控制装置200的飞行器控制部220将命令一边飞行一边将行驶体300吊下至对象地域的吊下命令以搬运用飞行器400为接收地而向数据通信电路204a输出(步骤S32)。
然后,控制装置200的数据通信电路204a将吊下命令发送给搬运用飞行器400之后,从搬运用飞行器400接收告知已将行驶体300吊下至对象地域表面的吊下报告。
接着,控制装置200的获取部210从数据通信电路204a获取吊下报告(步骤S33)。然后,行驶体控制部230将命令在搬运用飞行器400飞行期间使行驶体300在对象地域中行驶的行驶命令以搬运用飞行器400为接收地而向数据通信电路204a输出(步骤S34)。
接着,控制装置200的数据通信电路204a将行驶命令发送给搬运用飞行器400,搬运用飞行器400将行驶命令转达给行驶体300。然后,数据通信电路204a从搬运用飞行器400接收表示行驶中的行驶体300的姿势的多个姿势信息与表示该姿势的检测日期时间的多个日期时间信息。另外,数据通信电路204a从搬运用飞行器400接收表示通过拍摄行驶体300所在的被覆体110而获得的图像的多个图像信息及表示拍摄日期时间的多个日期时间信息。
接着,控制装置200的获取部210从数据通信电路204a获取多个姿势信息与日期时间信息,将所获取的多个姿势信息各自作为表示对象地域表面状态的状态信息。将表示行驶体300的姿势的姿势信息作为表示对象地域表面状态的状态信息的原因在于,行驶体300的姿势会根据行驶体300所行驶的对象地域的表面状态而发生变化。
另外,获取部210从数据通信电路204a获取多个图像信息与日期时间信息,将所获取的多个图像信息各自作为状态信息(步骤S35)。将表示行驶体300所在被覆体110的图像信息作为表示对象地域表面状态的状态信息的原因在于,被覆体110因行驶体300的重量而被迫与对象地域的表面密接,所以被覆体110的表面状态表示对象地域的表面状态。
然后,判定部240基于所获取的多个状态信息,指定出因行驶体300的行驶产生的描绘在被覆体110表面的花纹的变化。接着,判定部240执行如图14所示的适应性判定处理,即,基于所指定的该花纹的变化与多个状态信息所表示的行驶体300的姿势,判定由被覆体110覆盖的对象地域的表面特性是否适合配送用飞行器500着陆(步骤S36)。
当开始执行适应性判定处理时,判定部240将表示行驶路径编号的变数n初始化为值“1”(步骤S51)。判定部240将变数n初始化为值“1”是因为要从第1路径依次执行下述处理。
接着,判定部240例如通过进行模板匹配,从所获取的多个状态信息所表示的多个图像中指定出表示第1条路径即第1路径的图像区域与表示行驶体300的图像区域。接着,判定部240指定出所指定的表示第1路径的图像区域与表示行驶体300的图像区域重叠或连续的多个图像,并将所指定的多个图像指定为通过拍摄在第1路径中行驶的行驶体300而获得的图像。
然后,判定部240关注被指定为通过拍摄在第1路径中行驶的行驶体300而获得的图像的多个图像中的1个。接着,判定部240在所关注的图像中,如图15所示,判断行驶体300是否位于点p1与点p2之间,在判断行驶体300位于点p1与点p2之间的情况下,算出该图像中点p1与点p2在该图像中的距离。然后,判定部240将所算出的距离设为因行驶体300而被迫变化后的点p1与点p2的距离l'。
行驶体300引起的该图像中的距离变化例如在以下情况下产生:如图16A所示,对象地域的表面S的一部分具有凹凸,被覆体110的点p1至点p2的部分及点p2至点p3的部分未与表面S密接。此时,如果行驶体300在被覆体110之上行驶且移动到点p1与点p2中间的位置,未与表面S密接的被覆体110的该部分会因行驶体300的重量而被迫与具有凹凸的表面S密接。因此,通过从铅直方向拍摄被覆体110而获得的图像中,相比于与表面S的凹凸密接之前,被覆体110的点p1至点p2的部分成为彼此间更近的位置,因此点p1与点p2在该图像中的距离因行驶体300而被迫变短。
然后,为了算出因行驶体300而被迫变化之前的点p1与点p2的距离l,判定部240读取信息存储部290预先存储的信息,该信息表示图8所示搬运用飞行器400具有的摄像装置452所具备的未图示透镜的焦点距离f。另外,判定部240读取表示高度H的信息及表示距离r/3的信息,该高度H是被覆体110整体包含于摄像装置452的视角中的搬运用飞行器400的飞行高度的最小值,该距离r/3是被覆体110的点p1至点p2的距离。
然后,判定部240基于所读取的信息表示的摄像装置452的焦点距离f、摄像装置452至被覆体110的距离即高度H、及被覆体110的点p1与点p2的距离r/3,算出水平铺设被覆体110时通过光轴朝向搬运用飞行器400的铅直下方向的摄像装置452进行拍摄获得的图像中点p1与点p2的距离。接着,判定部240将所算出的距离设为因行驶体300而被迫变化之前的点p1与点p2的距离l。
然后,判定部240通过将值“1”减去用点p1与点p2变化后的距离l'除以点p1与点p2变化前的距离l所得的值,算出表示所关注图像在拍摄日期时间的格子状花纹的变化的变化值。越是行驶体300在表面S的凹陷更深的点上行驶时拍摄所得的图像,与凹形状的表面S密接的被覆体110的点p1与点p2位置就越近,因此,根据该图像算出的变化值越接近值“1”。相对于此,根据行驶体300在表面S的凹陷更浅的点上行驶时拍摄所得的图像算出的变化值更接近值“0”。此外,表面S的凹陷形成为2个凸部的谷,因此,根据行驶体300在表面S的凸部的更低点上行驶时拍摄所得的图像算出的变化值更接近值“1”,根据行驶体300在表面S的凸部的更高点上行驶时拍摄所得的图像算出的变化值更接近值“0”。
判定部240在判断行驶体300不位于点p1与点p2之间的情况下,进一步判断所关注图像中行驶体300是否位于点p2与点p3之间,在判断行驶体300位于点p1与点p2之间的情况下,算出点p2与点p3变化前的距离l及变化后的距离l'。
另外,判定部240在判断行驶体300不位于点p2与点p3之间的情况下,判断行驶体300位于点p3与点p4之间,并算出点p3与点p4变化前的距离l及变化后的距离l'。然后,判定部240反复进行花纹变化值的算出,直至不再存在未关注图像为止。
接着,判定部240根据行驶体300在第1路径中行驶的所有图像算出花纹的变化值之后,将所算出的多个变化值的平均及分散算出(图14的步骤S52)。
接着,判定部240判断花纹的变化值的分散是否大于预先规定的第1阈值(步骤S53)。此时,当判定部240判断花纹的变化值的分散大于第1阈值时(步骤S53;是),为了让配送用飞行器500安全着陆到对象地域,指定为对象地域表面的凹凸过大(步骤S54)。
判定部240如此指定的原因在于,例如如图16B所示,根据行驶体300在对象地域的表面S的凹陷越深的点上行驶时拍摄所得的图像算出的花纹的变化值的计算结果越大,根据行驶体300在表面S的凹陷越浅的点上行驶时拍摄所得的图像算出的花纹的变化值的计算结果越小。也就是说,原因在于,在花纹的变化值的分散大于预先规定的第1阈值的情况下,可指定为对象地域的表面S所具有的1个或多个凹凸大于预先规定的大小。
在图14的步骤S53中,当判定部240判断花纹的变化值的分散为第1阈值以下时(步骤S53;否),基于被指定为通过拍摄在第1路径中行驶的行驶体300而获得的图像的多个图像的拍摄日期时间,指定出行驶体300在第1路径中行驶的期间。接着,判定部240指定出表示指定期间中包含的日期时间的多个日期时间信息以及所获取的表示行驶体300的姿势角度的多个状态信息。然后,判定部240算出所指定的多个状态信息所表示的行驶体300的姿势角度的平均及分散(步骤S55)。
接着,判定部240判断行驶体300的姿势角度的分散是否大于预先规定的第2阈值(步骤S56)。此时,当判定部240判断姿势角度的分散大于第2阈值时(步骤S56;是),指定为对象地域的表面的凹凸过大(步骤S54)。
判定部240如此指定的原因在于,行驶体300的姿势角度是行驶体300的行进方向与水平面所成的最小角度。也就是说,原因在于,例如如图16C所示,行驶体300进入表面S的凹陷时所检测的姿势角度的符号为负,行驶体300脱离该凹陷时所检测的姿势角度的符号为正,行驶体300进入表面S的凹陷时与脱离表面S的凹陷时,姿势角度的符号不同。同样地,行驶体300驶下表面S的凸部时所检测的姿势角度的符号为负,行驶体300登上该凸部时所检测的姿势角度的符号为正。另外,原因在于,表面S的凹陷或凸部具有的倾斜越大,所检测的角度就越大,且表面S的凹陷或凸部具有的倾斜越小,所检测的角度就越小。也就是说,原因在于,在表示行进方向的姿势角度的分散大于预先规定的第2阈值的情况下,可指定为对象地域的表面S具有的1个或多个凹凸大于预先规定的大小。
步骤S56中,当判定部240判断表示行驶体300的行进方向的姿势角度的分散为第2阈值以下时(步骤S56;否),指定为对象地域的表面S具有的1个或多个凹凸小或者没有凹凸,以至于能让配送用飞行器500安全着陆到对象地域(步骤S57)。
接着,判定部240将表示行驶体300的行进方向的姿势角度的平均值指定为表示对象地域的表面倾斜的角度(步骤S58)。
然后,判定部240判断表示表面倾斜的角度是否大于预先规定的第3阈值(步骤S59)。此时,当判定部240判断表示倾斜的角度大于第3阈值时(步骤S59;是),为了让配送用飞行器500安全着陆到对象地域,指定为对象地域的表面倾斜过大(步骤S60)。判定部240如此指定的原因在于,如果表面的倾斜大于第3阈值,配送用飞行器500着陆时倒下的可能性就会高于预计的可能性。
步骤S59中,当判定部240判断表示表面倾斜的角度为第3阈值以下时(步骤S59;否),指定为对象地域的表面倾斜小或者没有倾斜,以至于能让配送用飞行器500安全着陆到对象地域(步骤S61)。
然后,判定部240判断花纹的变化值的平均值是否大于预先规定的第4阈值(步骤S62)。此时,当判定部240判断花纹的变化值的平均值大于第4阈值时(步骤S62;是),为了让配送用飞行器500安全着陆到对象地域,指定为对象地域的表面过软(步骤S63)。判定部240如此指定的原因在于,对象地域的表面整体越软,花纹的变化值整体就越大,因此,花纹的变化值的分散越小,且花纹的变化值的平均越大。也就是说,原因在于,在花纹的变化值的分散为预先规定的第1阈值以下,且花纹的变化值的平均大于预先规定的第4阈值的情况下,可指定为对象地域的表面比预先规定的柔软度软。因此,可指定为,在配送用飞行器500着陆到对象地域时或从着陆起经过预先规定的时间之前,表面的形状因配送用飞行器500的重量而变化,配送用飞行器500失去平衡或倒下的可能性高于预计的可能性。
在步骤S62中,当判定部240判断花纹的变化值的平均值为第4阈值以下时(步骤S62;否),指定为对象地域的表面坚硬,以至于能让配送用飞行器500安全着陆到对象地域(步骤S64)。
然后,判定部240判断在通过使变数n的值增加值“1”使之成为值“2”之后(步骤S65),变数n的值是否多于行驶路径的总数“4”(步骤S66)。此时,当判定部240判断变数n的值“2”为行驶路径的总数“4”以下时(步骤S66;否),针对第2路径从步骤S52起重复所述处理。
然后,当判定部240判断变数n的值为“5”,变数n的值大于行驶路径的总数“4”时(步骤S66;是),判断已对4条行驶路径执行了所述处理。接着,判定部240在判定对象地域的表面适合配送用飞行器500着陆之后(步骤S67),结束适应性判定处理的执行。
判定部240在所述步骤S54中指定为对象地域的表面具有的1个或多个凹凸过大之后,在步骤S60中指定为表面的倾斜过大之后,或者,在步骤S63中指定为表面过软之后,判定对象地域的表面不适合配送用飞行器500着陆(步骤S68)。然后,判定部240结束适应性判定处理的执行。此外,适应性判定处理中使用的第1阈值至第4阈值的优选值可由业者通过试验来确定。
当判定部240通过适应性判定处理判定出对象地域的表面适合配送用飞行器500着陆时(图13的步骤S37;是),判定配送用飞行器500可着陆到对象地域(步骤S38),且判定将该对象地域用作航空站(步骤S39)。
接着,更新部250在图7的航空站表格中,将与步骤S31中所获取的到达报告中包含的表示对象地域纬度的信息及表示对象地域经度的信息配对的使用标志,更新为将表示将该对象地域用作航空站的使用标志(步骤S40)。
然后,通知部260生成通知开始将对象地域作为航空站使用的使用开始通知,并将所生成的使用开始通知以移动终端190为接收地而向图4的数据通信电路204a输出(步骤S41)。当图3所示的移动终端190的数据通信电路194a接收到使用开始通知时,移动终端190的CPU191就对显示装置195b进行控制,即,使其显示使用开始通知。
当判定部240通过适应性判定处理判定出对象地域的表面不适合配送用飞行器500着陆时(步骤S37;否),就判定配送用飞行器500无法着陆到对象地域(步骤S42),且判定不将该对象地域用作航空站(步骤S43)。
然后,更新部250不更新图7的航空站表格,而是由通知部260生成不使用通知,该不使用通知所通知的是,不将对象地域用作航空站,以及在图14的步骤S54、S60、或S63中判定不适合当作航空站的理由。接着,通知部260将所生成的不使用通知以移动终端190为接收地而向图4的数据通信电路204a输出(步骤S44)。当移动终端190的数据通信电路194a接收到不使用通知时,移动终端190的CPU191就对显示装置195b进行控制,即,使其显示不使用通知以及要求改善对象地域的消息。
执行步骤S41或S44之后,控制装置200的行驶体控制部230将命令停止行驶的行驶停止命令以搬运用飞行器400为接收地而向数据通信电路204a输出(步骤S45)。另外,飞行器控制部220将命令吊起行驶体300的吊起命令与命令返回营业部的返回命令以搬运用飞行器400为接收地而向数据通信电路204a输出之后(步骤S46及47),结束使用判定处理的执行。
当在包含被判定用作航空站的对象地域的地域进行物品配送的业者的营业部被搬入物品时,在营业部工作的工作人员会阅读将物品捆包的硬板纸上所贴的单据,确认物品的配送地。然后,工作人员进行使图4所示的控制装置200的输入装置205c输入配送地的操作。
当控制装置200的输入装置205c输入与工作人员的操作相应的信号时,控制装置200的CPU201就执行如图17所示的配送控制处理,即,使配送用飞行器500配送物品。
当开始执行配送控制处理时,控制装置200的获取部210就基于所输入的信号获取表示配送地住址的信息。接着,获取部210从信息存储部290中获取与所获取的住址预先配对存储的表示该住址纬度的信息与表示该住址经度的信息(步骤S71)。
接着,判定部240从图7的航空站表格中获取与表示配送地纬度的信息及表示配送地经度的信息配对的使用标志(步骤S72),并判断所获取的使用标志是否为表示使用对象地域作为航空站的标志(步骤S73)。
此时,当判定部240判断所获取的使用标志是表示使用对象地域作为航空站的标志时(步骤S73;是),通知部260使图4所示的显示装置205b发出通知,即提示将物品装载至配送用飞行器500(步骤S74)。
然后,工作人员视认通知时,将物品装载至配送用飞行器500之后,操作控制装置200的输入装置205c。当经工作人员操作后的输入装置205c输入表示物品向配送用飞行器500的装载结束的信号时,飞行器控制部220生成飞行命令,该飞行命令包含表示配送地纬度的信息及表示配送地经度的信息,命令飞行到该配送地。然后,飞行器控制部220在将所生成的飞行命令以配送用飞行器500为接收地而向数据通信电路204a输出后(步骤S75),结束配送控制处理的执行。
在步骤S73中,当判定部240未能从图7的航空站表格中获取使用标志,或者判断所获取的使用标志是表示不使用对象地域作为航空站的标志时(步骤S73;否),就决定不用配送用飞行器500配送物品。然后,通知部260例如使显示装置205b发出通知以提示工作人员用汽车、摩托车、自行车或徒步配送物品之后,结束配送控制处理的执行。
配送用飞行器500是如图18所示的无人机,具备控制装置510、螺旋桨臂521~524、螺旋桨531~534、使螺旋桨531~534旋转的未图示马达、及摄像装置551。配送用飞行器500所具备的控制装置510、螺旋桨臂521~524、螺旋桨531~534、未图示马达、及摄像装置551的构成及功能与搬运用飞行器400所具备的控制装置410、螺旋桨臂421~424、螺旋桨431~434、未图示马达、及摄像装置451的构成及功能相同。
配送用飞行器500在控制装置510的下方具备:第1围持框541a,围持将物品捆包的长方体形状的硬板纸的其中一个侧面所具有的4条边;及第2围持框541b,围持与由第1围持框541a围持的面(以下称为第1围持面)对向的侧面(以下称为第2围持面)所具有的4条边。进而,配送用飞行器500在控制装置510的下表面具备导轨542a及542b,该导轨542a及542b沿物品的第1围持面及第2围持面的法线方向延设,吊持第1围持框541a与第2围持框541b,且将第1围持框541a与第2围持框541b的移动方向设为延设方向。
此外,配送用飞行器500具备未图示马达,该马达在控制装置510的控制之下,通过使第1围持框541a与第2围持框541b朝相互接近的方向移动,而使第1围持框541a与第2围持框541b围持物品。该未图示马达在控制装置510的控制之下,通过使第1围持框541a与第2围持框541b朝相互远离的方向移动,而使第1围持框541a与第2围持框541b放开所围持的物品。
进而,配送用飞行器500具备支撑脚543,该支撑脚543从控制装置510的下表面向下方突出,支撑控制装置510。支撑脚543的铅直方向长度被设计为,比第1围持框541a及第2围持框541b的铅直方向长度长出预先规定的长度。
配送用飞行器500的控制装置510具备未图示CPU、RAM、ROM、快闪存储器、数据通信电路、GPS电路、输入输出端口、及驱动电路。配送用飞行器500的未图示CPU、RAM、ROM、快闪存储器、数据通信电路、GPS电路、及输入输出端口的构成及功能与图10所示的搬运飞行器400的CPU411、RAM412、ROM413a、快闪存储器413b、第1数据通信电路414a、GPS电路416、及输入输出端口418的构成及功能相同。
配送用飞行器500所具备的未图示驱动电路连接于与使螺旋桨531~534旋转的未图示马达分别连接的未图示缆线、以及与使第1围持框541a与第2围持框541b移动的未图示马达连接的缆线。驱动电路519根据未图示CPU输出的信号,驱动使螺旋桨531~534旋转的未图示马达或使第1围持框541a与第2围持框541b移动的未图示马达。
当配送用飞行器500所具备的未图示数据通信电路接收到从控制装置200发送的飞行命令时,配送用飞行器500所具备的未图示CPU执行如图19所示的交接控制处理,即,控制未图示马达等,以让配送用飞行器500遵照飞行命令飞行至配送地,并在配送地交接物品。
当开始执行交接控制处理时,配送用飞行器500的CPU通过执行与图11的步骤S11至S13相同的处理,而让配送用飞行器500遵照飞行命令飞行至配送地(步骤S81至S83)。
接着,配送用飞行器500的CPU生成以使配送用飞行器500着陆到对象地域的方式控制螺旋桨531~534的控制信号并将其输出至未图示驱动电路(步骤S84)。然后,CPU生成使第1围持框541a与第2围持框541b朝相互远离的方向移动的控制信号并将其输出至驱动电路,从而使第1围持框541a及第2围持框541b放开物品。由此,配送用飞行器500例如将物品交给在配送地的人(步骤S85)。
接着,配送用飞行器500的CPU生成以使配送用飞行器500从对象地域起飞的方式控制螺旋桨531~534的控制信号并将其输出至驱动电路(步骤S86)。然后,CPU在通过执行与图11的步骤S24相同的处理而在飞行路径中逆行飞行至营业部之后(步骤S87),结束交接控制处理的执行。
根据这些构成,控制装置200具备判定部240,该判定部240基于表示对象地域的表面状态的状态信息,判定配送用飞行器500能否着陆到该对象地域。因此,即使例如工作人员未去对象地域确认对象地域的表面状态,控制装置200也能判定配送用飞行器500能否着陆到对象地域。
另外,控制装置200具备:行驶体控制部230,使行驶体300在对象地域中行驶;获取部210,获取表示行驶体300在对象地域中行驶期间对象地域的表面状态的状态信息;以及判定部240,基于所获取的状态信息,判定配送用飞行器500能否着陆到该对象地域。因此,即使是在例如对象地域的表面状态例如会在着陆时或刚着陆后因施加给表面的配送用飞行器500的重量而变化的情况下,也能基于表示因行驶体300的重量而变化后的表面状态的状态信息,在配送用飞行器500着陆到对象地域之前就判定出该配送用飞行器500能否着陆到对象地域。
进而,对象地域的表面由被覆体110覆盖。另外,控制装置200还具备获取部210,该获取部210获取行驶体300在被覆体110之上行驶期间通过摄像装置452拍摄被覆体110而获得的图像,以此作为状态信息。进而,控制装置200的判定部240基于根据所获取的状态信息所指定的被覆体110的变化,判定配送用飞行器500能否着陆到由被覆体110覆盖的对象地域。因此,即使在因对象地域的表面由被覆体110覆盖而无法直接观测到表面状态的情况下,控制装置200也能基于通过拍摄因行驶体300的重量而被迫与对象地域的表面密接的被覆体110所获得的图像,获取表示表面状态的状态信息。
另外,被覆体110具有预先规定的花纹ps1、ps2、pf1、及pf2,控制装置200的判定部240基于根据所获取的状态信息所指定的被覆体110的花纹变化,来判定配送用飞行器500能否着陆到由被覆体110覆盖的对象地域。此处,当未与对象地域表面密接的被覆体110因行驶体300的重量而被迫与对象地域的表面密接时,描绘在被覆体110上的花纹ps1、ps2、pf1、及pf2的间隔会在通过拍摄该被覆体110而获得的图像中发生变化。因此,控制装置200能够基于描绘在被覆体110上的花纹ps1、ps2、pf1、及pf2在图像中的变化而更高精度地观测表面状态,从而能够更高精度地判定该配送用飞行器500能否着陆到对象地域。
进而,控制装置200的判定部240基于被覆体110的花纹ps1、ps2、pf1、及pf2的变化,指定出由被覆体110覆盖的对象地域的表面特性,并基于所指定的特性,判定配送用飞行器500能否着陆到对象地域,因此能够更高精度地判定配送用飞行器500能否安全着陆到对象地域。
进而,对象地域的表面特性包括该表面具有的凹凸的大小、该表面具有的倾斜的大小、及该表面的柔软度中的任一种以上。因此,控制装置200的判定部240基于被覆体110的花纹ps1、ps2、pf1、及pf2的变化,指定出由被覆体110覆盖的对象地域表面的凹凸的大小、倾斜的大小、及柔软度中的任一种以上。另外,判定部240基于所指定的凹凸的大小、倾斜的大小、及柔软度中的任一种以上,判定配送用飞行器500能否着陆到对象地域。越是具有更大凹凸的表面,配送用飞行器500着陆到该表面时,配送用飞行器500失去平衡并倒下等,无法安全着陆的可能性就越高。同样地,越是具有更大倾斜的表面,或者越是更软的表面,配送用飞行器500无法安全着陆的可能性就越高。因为所述原因,控制装置200能够基于所指定的对象地域表面的凹凸的大小、倾斜的大小、及柔软度中的任一种以上,更高精度地判定配送用飞行器500能否安全着陆到对象地域。
搬运行驶体300的搬运用飞行器400是不同于配送用飞行器500的飞行器,它与行驶体300物理连接。控制装置200还具备飞行器控制部220,该飞行器控制部220使该搬运用飞行器400一边在对象地域的上空飞行,一边将行驶体300下降至对象地域。另外,控制装置200的行驶体控制部230在行驶体300下降至对象地域之后,在搬运用飞行器400飞行期间使行驶体300在对象地域中行驶。进而,飞行器控制部220在行驶体300在对象地域中行驶之后,使搬运用飞行器400一边飞行,一边将行驶体300从对象地域上拉。根据这些构成,即使在例如对象地域的表面不适合搬运用飞行器400着陆及起飞的情况下,控制装置200也能将行驶体300下降至对象地域使之行驶,且从对象地域将行驶体300确实地上拉。
搬运用飞行器400具备拍摄被覆体110的摄像装置452,控制装置200的获取部210从搬运行驶体300的搬运用飞行器400获取表示行驶体300在被覆体110之上行驶期间拍摄所得的图像的信息,以此作为状态信息。此处,如果仅仅是搬运用飞行器400一边在对象地域的上空盘旋飞行或回旋飞行,一边用摄像装置452拍摄对象地域,那么在对象地域的表面由被覆体110覆盖,且被覆体110并非整体密接于对象地域表面的情况下,就会难以获取表示对象地域表面状态的状态信息。难以获取状态信息的原因在于,被覆体110的表面状态未必与对象地域的表面状态一致,因此,如果行驶体300在被覆体110之上行驶期间由摄像装置452来拍摄被覆体110,就能生成表示因行驶体300的重量而被迫与对象地域表面密接的被覆体110的表面的图像,从而能够获取表示该图像的信息作为表示对象地域表面状态的状态信息。
行驶体300具备在行驶体300在对象地域中行驶期间检测行驶体300的姿势的检测部387,控制装置200的获取部210获取表示所检测出的姿势的信息作为表示表面状态的状态信息。因此,即使被覆体110覆盖着对象地域的表面,也能获取表示表面状态的状态信息。
<实施例的变化例1>
本实施例中,进行了这样的说明:控制装置200的判定部240在图14的步骤S54及S57中指定出对象地域表面的凹凸的大小,在步骤S60及S61中指定出表面倾斜的大小,且在步骤S63及S64中指定出表面的柔软度。另外,进行了以下说明:判定部240基于所指定的凹凸的大小、倾斜的大小、及柔软度,来判定配送用飞行器500能否着陆到对象地域。
但是,并不限定于此,判定部240也可以指定出对象地域表面的凹凸的大小、倾斜的大小、及柔软度中的任一种,且基于所指定的凹凸的大小、倾斜的大小、及柔软度中的任一种,来判定配送用飞行器500能否着陆到对象地域。
另外,并不限定于此,判定部240也可以指定出对象地域表面的凹凸的大小、倾斜的大小、及柔软度中的任意两种,且基于所指定的凹凸的大小、倾斜的大小、及柔软度中的任意两种,判定配送用飞行器500能否着陆到对象地域。
<实施例的变化例2>
本实施例中,进行了这样的说明:控制装置200的判定部240基于表示行驶体300的姿势角度的状态信息与表示通过拍摄行驶体300所在的被覆体110而获得的图像的状态信息这两者,来判定配送用飞行器500能否着陆到对象地域。
但是,并不限定于此,控制装置200的判定部240也可以基于表示通过拍摄行驶体300所在的被覆体110而获得的图像的状态信息,来判定配送用飞行器500能否着陆到对象地域。
此时,控制装置200的判定部240在图14的步骤S53中判断基于表示图像的状态信息算出的表示被覆体110的变化的变化值的分散为第1阈值以下之后(步骤S53;否),可不必执行使用表示姿势角度的状态信息的步骤S55及S56。
另外,判定部240在判断变化值的分散为第1阈值以下之后(步骤S53;否),代替步骤S58而执行以下处理:使用变化前的距离l与变化后的距离l'来算出表示对象地域表面倾斜的角度θ。
以下,为了简化说明,举出表示行驶路径的变数n的值是“1”的情况为例进行了说明,但并不限定于此,变数n的值可以是“2”至“4”。
如图20所示,当被覆体110在第1路径中包含的点p1至点p2的部分因行驶体300的重量而被迫与对象地域的表面S密接的情况下,表示表面S的倾斜的角度θ
此处,点p1与点p2的实际距离r/3和水平方向距离r'/3的比r'/r等于点p1与点p2变化前的距离l和点p1与点p2变化后的距离l'的比。其原因在于,点p1与点p2变化前的距离l,是在水平铺设被覆体110的情况下,通过光轴朝向搬运用飞行器400的铅直下方向的摄像装置452拍摄被覆体110而获得的图像中的点p1与点p2的距离。另外,其原因在于,点p1与点p2变化后的距离l',是在因行驶体300而使被覆体110的点p1至点p2的部分被迫与表面S密接时,通过摄像装置452拍摄被覆体110而获得的图像中的点p1与点p2的距离。
因此,判定部240将使用点p1与点p2变化前的距离l和变化后的距离l'算出的Arccos(l'/l)的值作为表示表面S的倾斜的角度θ
另外,并不限定于此,控制装置200的判定部240也可以基于表示行驶体300的姿势角度的状态信息,判定配送用飞行器500能否着陆到对象地域。
此时,控制装置200的判定部240可不必执行使用表示图像的状态信息的图14的步骤S52及S53。
另外,控制装置200的判定部240算出状态信息所表示的行驶体300在停止前的姿势角度与行驶体300停止预先规定的时间后的姿势角度的差异,来代替步骤62的处理。判定部240算出这种差异的原因在于,在对象地域的表面松软的情况下,表面的形状会因行驶体300的重量而随时间经过发生变化,因此行驶体300在停止前的姿势角度与行驶体300停止预先规定的时间后的姿势角度会产生差异。
然后,控制装置200的判定部240判断所算出的姿势角度的差异为预先规定的阈值以上时,为了让配送用飞行器500安全着陆到对象地域,作出对象地域的表面过软的判断即可(步骤S63)。相对于此,判定部240判断所算出的姿势角度的差异小于该阈值时,做出以下指定即可:对象地域的表面坚硬,以至于能让配送用飞行器500安全着陆到对象地域(步骤S64)。此外,预先规定的时间及预先规定的阈值的优选值可由业者通过试验来确定。
<实施例的变化例3>
本实施例中,进行了这样的说明:控制装置200的判定部240判定配送用飞行器500能否着陆到对象地域,但并不限定于此,也可以判定搬运用飞行器400能否着陆到对象地域。此时,判定部240在图14的步骤S53及S56、S59、以及S62中采用用来进行以下判定的第1阈值及第2阈值、第3阈值、以及第4阈值即可,即,判定表面的凹凸是否较大,表面的倾斜是否较大,表面是否较软,以至于搬运用飞行器400无法安全着陆。
另外,并不限定于此,控制装置200的判定部240也可以判定搬运用飞行器400及配送用飞行器500这两者能否着陆到对象地域。在这种情况下,也是同样地,判定部240在图14的步骤S53及S56、S59、以及S62中采用用来进行以下判定的第1阈值及第2阈值、第3阈值、以及第4阈值即可,即,判定表面的凹凸是否较大,表面的倾斜是否较大,表面是否较软,以至于搬运用飞行器400及配送用飞行器500中的至少一个无法安全着陆。本变化例中采用的这些阈值的优选值可由业者通过试验来确定。
<实施例的变化例4>
本实施例中,进行了这样的说明:控制装置200的判定部240判定配送用飞行器500能否着陆到对象地域,但并不限定于此,也可以判定配送用飞行器500能否从对象地域起飞。
其原因在于,关于如图18所示利用螺旋桨531~534获得升力的配送用飞行器500,如果配送用飞行器500的姿势相比于预先规定的角度倾斜更大,则无法获得充分的升力,起飞时会倒下等,无法安全起飞,或者,根本无法起飞。
此时,判定部240在图14的步骤S53、S56、S59、及S62中采用用以进行以下判定的第1阈值及第2阈值、第3阈值、以及第4阈值即可,即,判定表面的凹凸是否较大,表面的倾斜是否较大,表面是否较软,以至于配送用飞行器500无法安全起飞。
另外,并不限定于此,控制装置200的判定部240也可以判定配送用飞行器500能否着陆到对象地域且能否从对象地域起飞,或者,判定是否无法着陆或无法起飞。在这种情况下,也是同样地,判定部240在图14的步骤S53及S56、S59、以及S62中采用用以进行以下判定的第1阈值及第2阈值、第3阈值、以及第4阈值即可,即,判定表面的凹凸是否较大,表面的倾斜是否较大,表面是否较软,以至于配送用飞行器500无法安全着陆或起飞。本变化例中采用的这些阈值的优选值可由业者通过试验来确定。
<实施例的变化例5>
本实施例中,进行了这样的说明:被覆体110是塑料片,但并不限定于此,例如也可以是聚酯、尼龙、棉或绢制的布、纸、或者铝或银等金属制片。
另外,本实施例中,进行了这样的说明:被覆体110的形状是一边为长度r的正方形状,但并不限定于此,例如也可以是包括三角形、长方形、及五边形在内的多边形、圆形、或椭圆形。
另外,本实施例中,进行了这样的说明:被覆体110具有将线状花纹pf1、pf2、ps1、及ps2组合而成的格子状花纹,但并非限定于此。被覆体110也可以描绘有例如n条线状花纹pfk与m线状花纹psj这两者或其中一者,该n条线状花纹pfk与基准第1边sf平行,且与基准第1边sf的距离分别为r×k/n+1(其中,k是1以上且n以下的整数,且n是1以上的正整数),该m线状花纹psj与基准第2边ss平行,且与基准第2边ss的距离分别为r×j/m+1(其中,j是1以上且m以下的整数,且m是1以上的正整数)。
被覆体110例如可以具有螺旋状的花纹、或者以内接于被覆体110的内接圆的中心为中心且直径为r×k/n(其中,k是1以上且n以下的整数,且n是1以上的正整数)的同心圆状的n个花纹。
<实施例的变化例6>
本实施例中,进行了这样的说明:行驶体300具备包括如图8所示的车轮301及302在内的多个车轮,但并不限定于此,行驶体300也可以具备具有多个关节的双脚,进行双足步行。另外,行驶体300也可以还具备例如包围该多个车轮的Caterpillar(注册商标)等履带。根据这些构成,即使对象地域的表面具有的凹凸或倾斜变得更大或者表面变得更软,行驶体300也能在对象地域中行驶。
<实施例的变化例7>
本实施例中,进行了这样的说明:图8所示的搬运用飞行器400具备拍摄被覆体110的摄像装置452,控制装置200的获取部210从搬运行驶体300的搬运用飞行器400获取表示通过在行驶体300在被覆体110之上行驶期间拍摄所得的图像的信息,以此作为状态信息。
但是,并不限定于此,本变化例的配送系统1例如也可以具备未图示摄像装置,该摄像装置设置在三脚架之上等,视角内包含被覆体110整体的位置上,控制装置200的获取部210获取以下信息来作为状态信息,该信息表示在行驶体300在被覆体110之上行驶期间由该未图示摄像装置拍摄所得的图像。
因此,本变化例的控制装置200的CPU201在图13的步骤S34中输出行驶命令之后,将命令拍摄的拍摄命令以未图示摄像装置为接收地而向数据通信电路204a输出。然后,数据通信电路204a将拍摄命令发送给未图示摄像装置之后,从未图示摄像装置接收表示通过拍摄被覆体110而获得的图像的多个图像信息与表示拍摄日期时间的多个日期时间信息。
然后,控制装置200的CPU201通过执行步骤S35至S44,获取多个图像信息作为状态信息,并基于所获取的状态信息来判定配送用飞行器500能否着陆到由被覆体110覆盖的对象地域。然后,控制装置200的CPU201在步骤S45中输出行驶停止命令之后,将命令停止拍摄的拍摄停止命令以未图示摄像装置为接收地而向数据通信电路204a输出。
未图示摄像装置具备未图示CPU、RAM、ROM、数据通信电路,它们具有的构成及功能与图3所示移动终端190所具备的CPU191、RAM192、ROM193a、及数据通信电路194a的构成及功能相同。另外,未图示摄像装置具备:未图示透镜、基于经透镜聚集的光生成电气信号的未图示摄像元件群、以及基于从摄像元件群输出的电气信号生成图像的未图示图像生成电路。
当未图示摄像装置所具备的数据通信电路从控制装置200接收到拍摄命令时,未图示摄像装置的CPU使图像生成电路生成图像,并从图像生成电路获取表示所生成图像的图像信息。接着,CPU获取OS所管理的系统日期时间作为通过拍摄获得图像的拍摄日期时间,并将所获取的图像信息与表示拍摄日期时间的日期时间信息以控制装置200为接收地而向未图示数据通信电路输出。然后,数据通信电路将图像信息与日期时间信息发送给控制装置200。接着,CPU从使图像生成电路生成图像的处理起重复所述处理,直至数据通信电路从控制装置200接收到拍摄停止命令为止。
<实施例的变化例8>
本实施例中,进行了这样的说明:图8所示的搬运用飞行器400的摄像装置452通过拍摄获取静止图像,控制装置200的获取部210获取表示在行驶体300在被覆体110之上行驶期间拍摄所得的静止图像的信息,以此作为状态信息。但是,并不限定于此,搬运用飞行器400的摄像装置452也可以通过拍摄获取动态图像,控制装置200的获取部210获取表示在行驶体300在被覆体110之上行驶期间拍摄所得的动态图像中包含的作为静止图像的帧的信息,以此作为状态信息。
<实施例的变化例9>
本实施例中说明了,搬运用飞行器400及配送用飞行器500分别为无人机,但并不限定于此,也可以是无人飞行物。
另外,搬运用飞行器400及配送用飞行器500未必无人,除去控制装置200的控制以外,只要是自主飞行的物体,就可以载人。同样地,行驶体300未必无人,除去控制装置200的控制以外,只要是自主行驶的物体,就可以载人。
<实施例的变化例10>
本实施例中,进行了这样的说明:控制装置200的判定部240通过执行图14所示的适应性判定处理,而判断对象地域的表面不适合供配送用飞行器500安全着陆时,判定配送用飞行器500无法着陆到对象地域。
但是,并不限定于此,控制装置200的判定部240在指定存在妨碍配送用飞行器500在对象地域上空安全着陆的障碍物,例如树枝或电线等高架线等的情况下,也可以判定配送用飞行器500无法着陆到对象地域。
因此,控制装置200的判定部240在图13的步骤S35中获取多个状态信息之后,例如通过进行模板匹配,从所获取的多个状态信息所表示的多个图像中,检测表示障碍物的图像区域。接着,当判定部240判断已从该多个图像中的任一个检测出表示障碍物的图像区域时,不执行图14的适应性判定处理的相关步骤S36及S37,就判定配送用飞行器500无法着陆到对象地域(步骤S42)。
相对于此,当控制装置200的判定部240判断从该多个图像中均未检测出表示障碍物的图像区域时,执行步骤S36来进行图14的适应性判定处理。然后,当判定部240判断出已通过适应性判定处理判定对象地域的表面适合供配送用飞行器500安全着陆时(步骤S37;是),判定配送用飞行器500可着陆到对象地域(步骤S38)。相对于此,当判定部240判断出已通过适应性判定处理判定该表面不适合着陆时(步骤S37;否),判定配送用飞行器500无法着陆到对象地域(步骤S42)。
另外,并不限定于此,控制装置200的判定部240在指定为从设置在对象地域或设置在对象地域附近的未图示警报装置以预先规定的声压以下的声压输出警报声音,或未输出警报声音的情况下,也可以判定配送用飞行器500无法着陆到对象地域,该警报声音通知包括搬运用飞行器400及配送用飞行器500在内的飞行器的接近。
未图示警报装置具备未图示CPU、RAM、ROM、快闪存储器、数据通信电路、及扬声器,它们具有的构成及功能与图3所示的移动终端190所具备的CPU191、RAM192、ROM193a、快闪存储器193b、数据通信电路194a、及扬声器199a的构成及功能相同。
控制装置200的获取部210在图13的步骤S31中获取告知搬运用飞行器400到达对象地域的到达报告之后,控制装置200的通知部260将命令输出警报声音的警报输出命令以警报装置为接收地而向图4所示的数据通信电路204a输出。另外,控制装置200的飞行器控制部220将命令发送表示搬运用飞行器400周围声音的声音信息的声音发送命令以搬运用飞行器400为接收地而向图4所示的数据通信电路204a输出。
当未图示警报装置的数据通信电路从控制装置200接收到警报输出命令时,警报装置的CPU就会遵照警报输出命令,读取预先存储于快闪存储器193b的表示警报声音的数据,并将根据所读取的数据表示警报声音的信号输出至扬声器。
搬运用飞行器400还具备未图示麦克风,该麦克风具有的构成及功能与图3所示移动终端190所具备的麦克风199b的构成及功能相同。当搬运用飞行器400的第1数据通信电路414a从控制装置200接收到声音发送命令时,搬运用飞行器400的CPU411根据未图示麦克风输出的信号,生成表示包含从警报装置的扬声器输出的警报声音在内的周围声音的声音信息,并将所生成的声音信息以控制装置200为接收地而向第1数据通信电路414a输出。
当控制装置200的数据通信电路204a接收到声音信息时,控制装置200的获取部210就从数据通信电路204a获取声音信息。接着,当控制装置200的判定部240判断所获取的声音信息表示的声压为预先规定的声压以下时,不执行步骤S32至S37,就判定配送用飞行器500无法着陆到对象地域(步骤S42)。相对于此,当控制装置200的判定部240判断声音信息所表示的声压大于预先规定的声压时,从步骤S32起依次连续执行图13所示的使用判定处理。
另外,并非限定于搬运用飞行器400具备未图示麦克风,也可以是行驶体300具备未图示麦克风。此时,当搬运用飞行器400的第1数据通信电路414a从控制装置200接收到声音发送命令时,搬运用飞行器400的CPU411只要通过将声音发送命令输出至第2数据通信电路414b而将声音发送命令传输给行驶体300即可。接着,当行驶体300的数据通信电路384b接收到声音发送命令时,行驶体300的CPU381只要根据未图示麦克风输出的信号生成声音信息,并将生成的声音信息输出至数据通信电路384b即可。然后,当搬运用飞行器400的第1数据通信电路414a接收到声音发送命令时,搬运用飞行器400的CPU411只要通过将声音发送命令以控制装置200为接收地而向第1数据通信电路414a输出,从而传输声音发送命令即可。
另外,并不限定于此,控制装置200的判定部240在对象地域存在包含人、动物、及物品在内的移动体时,指定为从未图示警报装置以预先规定的声压以下的声压输出提示从对象地域退出的警报声音,或未输出该警报声音的情况下,也可以判定配送用飞行器500无法着陆到对象地域。
控制装置200的判定部240在图13的步骤S34中将使行驶体300在对象地域中行驶的行驶命令输出之后,控制装置200的飞行器控制部220将声音发送命令以搬运用飞行器400为接收地而向图4所示的数据通信电路204a输出。
未图示警报装置连接于侦测对象地域中移动体的存在的未图示人感传感器。未图示人感传感器例如为多普勒传感器,侦测在对象地域内移动的行驶体300,并将表示在对象地域内已侦测到移动体的信号输出。
未图示警报装置具备与人感传感器连接的输入端口。当表示已侦测到移动体的信号经由未图示警报装置的输入端口从人感传感器输入时,警报装置的CPU将表示提示从对象地域退出的警报声音的信号输出至扬声器。
当搬运用飞行器400的第1数据通信电路414a接收到声音发送命令时,CPU411根据未图示麦克风输出的信号生成声音信息,并将生成的声音信息以控制装置200为接收地而向第1数据通信电路414a输出。此外,搬运用飞行器400也可以将具备未图示麦克风的行驶体300根据该麦克风输出的信号生成的声音信息传输给控制装置200。
当控制装置200的数据通信电路204a接收到声音信息时,控制装置200的获取部210从数据通信电路204a获取声音信息。当控制装置200的判定部240判断所获取的声音信息表示的声压为预先规定的声压以下时,不执行步骤S35至S37,就判定配送用飞行器500无法着陆到对象地域(步骤S42)。相对于此,当控制装置200的判定部240判断声音信息所表示的声压大于预先规定的声压时,从步骤S35起依次连续执行图13所示的使用判定处理。此外,预先规定的声压的优选值可由业者通过试验来确定。
另外,未图示警报装置并非限定于具备人感传感器,警报装置也可以具备多个未图示激光传感器。例如在对象地域的形状为四边形的情况下,在对象地域所具有的顶点,沿顺时针方向或逆时针方向配置有第1激光传感器至第4激光传感器。此外,对象地域的形状可以是例如四边形以外的多边形、圆形、或椭圆形。
第1激光传感器具备:未图示发光部,例如为激光二极管,将相互平行或大致平行地行进的2束激光朝向第2激光传感器照射至空间内;以及驱动电路,驱动发光部。另外,第1激光传感器具备2个未图示受光部,这2个未图示受光部例如为光电二极管,分别接收从第4激光传感器照射来的相互平行或大致平行地行进的2束激光而输出电气信号。进而,第1激光传感器具备侦测电路,该侦测电路基于从2个受光部分别输出的电气信号,侦测包含人、动物、及物品在内的物体进入或退出对象地域,并将表示已侦测到入域或退域的侦测信号输出至未图示警报装置。
侦测电路是在2个未图示受光部之中,设置于对象地域更外侧的第1受光部停止输出电气信号起预先规定的时间以内,设置于对象地域更内侧的第2受光部停止输出电气信号时,侦测物体向对象地域的进入,并将表示已侦测到入域的入域信号输出。另外,侦测电路在内侧的第2受光部停止输出电气信号起预先规定的时间以内,外侧的第1受光部停止输出电气信号时,侦测物体从对象地域的退出,并将表示已侦测到退域的退域信号输出。
第1激光传感器将激光朝向第2激光传感器照射至空间,且第4激光传感器接收照射至空间的激光,而第2激光传感器将激光朝向第3激光传感器照射至空间,且第1激光传感器接收所照射的激光,除这点以外,第2激光传感器的构成及功能与第1激光传感器的构成及功能相同。另外,除将激光朝向第4激光传感器照射至空间,且第2激光传感器接收所照射的激光这一点以外,第3激光传感器的构成及功能与第1激光传感器的构成及功能相同。进而,除将激光朝向第1激光传感器照射至空间,且第3激光传感器接收所照射的激光这一点以外,第4激光传感器的构成及功能与第1激光传感器的构成及功能相同。
未图示警报装置的CPU经未图示第1~第4激光传感器中的任一个输入入域信号时,使表示进入对象地域后未退出的物体数量的计数值增加值“1”。相对于此,警报装置的CPU经第1~第4激光传感器中的任一个输入退域信号时,使计数值减少值“1”。如果计数值的值大于值“0”,警报装置的CPU就会侦测到对象地域存在物体,将表示提示从对象地域退出的警报声音的信号输出至扬声器。相对于此,如果计数值的值等于值“0”,警报装置的CPU就会侦测到对象地域没有物体,从而停止输出警报声音。
<实施例的变化例11>
进行了这样的说明:本实施例的配送系统1具备如图1所示的控制装置200及搬运用飞行器400,但并非限定于此。配送系统1也可以不具备控制装置200,而是由图10所示搬运用飞行器400所具备的控制装置410发挥本实施例的控制装置200的功能。
也就是说,搬运用飞行器400的控制装置410所具备的CPU411也可以执行图5所示的搬运控制处理、图13所示的使用判定处理、图14所示的适应性判定处理、及图17所示的配送控制处理。由此,搬运用飞行器400的CPU411也可以作为具有分别与图6所示的控制装置200的获取部210、飞行器控制部220、行驶体控制部230、判定部240、更新部250、及通知部260相同的功能的未图示获取部、飞行器控制部、行驶体控制部、判定部、更新部、及通知部发挥功能。另外,搬运用飞行器400的控制装置410所具备的快闪存储器413b也可以作为具有与图6所示的控制装置200的信息存储部290相同功能的未图示信息存储部发挥功能。
本实施例及本实施例的变化例1~11可相互分别组合。能作为具备用以实现本实施例及本实施例的变化例1至10中任一例的功能的构成的控制装置200、及具备用以实现本实施例的变化例11的功能的构成的控制装置410来提供自不必说,还能作为系统来提供,该系统是由多个装置构成,且具备用以实现本实施例及本实施例的变化例1至11中任一例的功能的构成作为系统整体。
另外,通过程序的应用,还能使现有控制装置作为本实施例及本实施例的变化例1至10中任一例的控制装置200分别发挥功能。也就是说,通过将用以实现本实施例及本实施例的变化例1至10中任一例所例示的控制装置200的各功能构成的程序以控制现有控制装置的计算机(CPU等)可执行的方式应用,能够使现有控制装置作为本实施例及本实施例的变化例1至10中任一例的控制装置200分别发挥功能。
另外,通过程序的应用,还能使现有控制装置作为本实施例的变化例11的控制装置410发挥功能。也就是说,通过将用以实现本实施例的变化例11所例示的控制装置410的各功能构成的程序以控制现有控制装置的计算机(CPU等)可执行的方式应用,能够使现有控制装置作为本实施例的变化例11的控制装置410发挥功能。
这种程序的分配方法任意,例如可搭载于存储卡、CD-ROM(Compact Disc ReadOnly Memory,光盘只读存储器)或DVD-ROM(Digital Versatile Disk Read Only Memory,数字多功能盘只读存储器)等记录媒体进行分配,此外,还可经由因特网等通信媒体进行分配。另外,本发明的方法可使用本实施例及本实施例的变化例1至10中任一例的控制装置200、及本实施例的变化例11的控制装置410来实施。
以上对本发明的优选实施例进行了详细叙述,但本发明并不限定于所述指定实施例,可在权利要求书中记载的本发明的主旨的范围内进行多种变化、变更。
(附记)
(附记1)
一种控制装置,具备:
行驶体控制部,使行驶体在对象地域中行驶;
获取部,获取表示所述行驶体在所述对象地域中行驶期间所述对象地域的表面状态的状态信息;以及
判定部,基于所获取的所述状态信息,判定飞行器能否着陆到所述对象地域。
(附记2)
根据附记1所述的控制装置,其中
所述对象地域的所述表面由被覆体覆盖;
所述获取部利用拍摄覆盖所述表面的所述被覆体的摄像装置,获取表示所述行驶体在所述被覆体之上行驶期间拍摄所得的图像的信息,以此作为所述状态信息;
所述判定部基于根据所获取的所述状态信息指定的所述被覆体的变化,判定所述飞行器能否着陆到由所述被覆体覆盖的所述对象地域。
(附记3)
根据附记2所述的控制装置,其中
所述被覆体具有预先规定的花纹;
所述判定部基于根据所获取的所述状态信息指定的所述被覆体的所述花纹的变化,判定所述飞行器能否着陆到由所述被覆体覆盖的所述对象地域。
(附记4)
根据附记3所述的控制装置,其中
所述判定部是:
基于所述被覆体的所述花纹的所述变化,指定出由所述被覆体覆盖的所述对象地域的所述表面的特性;并
基于所指定的所述表面的所述特性,判定所述飞行器能否着陆到所述对象地域。
(附记5)
根据附记4所述的控制装置,其中
所述表面的所述特性包括所述表面具有的凹凸的大小、所述表面具有的倾斜的大小、及所述表面的柔软度中的任一种以上。
(附记6)
根据附记1所述的控制装置,其
还具备飞行器控制部,该飞行器控制部使搬运用飞行器一边在所述对象地域的上空飞行,一边让所述行驶体下降至所述对象地域,该搬运用飞行器是与所述飞行器相同或与所述飞行器不同的飞行器,与所述行驶体物理连接,且搬运所述行驶体;
所述行驶体控制部在所述行驶体下降至所述对象地域之后,在所述搬运用飞行器飞行期间,使所述行驶体在所述对象地域中行驶;
所述飞行器控制部在所述行驶体在所述对象地域中行驶之后,使所述搬运用飞行器一边飞行,一边将所述行驶体从所述对象地域上拉。
(附记7)
根据附记2至5中任一附记所述的控制装置,其
还具备飞行器控制部,该飞行器控制部使搬运用飞行器一边在所述对象地域的上空飞行,一边让所述行驶体下降至所述对象地域,该搬运用飞行器是与所述飞行器相同或与所述飞行器不同的飞行器,与所述行驶体物理连接,且搬运所述行驶体;
所述行驶体控制部在所述行驶体下降至所述对象地域之后,在所述搬运用飞行器飞行期间,使所述行驶体在所述对象地域中行驶;
所述飞行器控制部在所述行驶体在所述对象地域中行驶之后,使所述搬运用飞行器一边飞行,一边将所述行驶体从所述对象地域上拉。
(附记8)
根据附记7所述的控制装置,其中
所述搬运用飞行器具备拍摄所述被覆体的所述摄像装置;
所述获取部从搬运所述行驶体的所述搬运用飞行器,获取表示所述行驶体在所述被覆体之上行驶期间拍摄所得的所述图像的所述信息,以此作为所述状态信息。
(附记9)
根据附记1至8中任一附记所述的控制装置,其中
所述行驶体具备检测部,该检测部在所述行驶体在所述对象地域中行驶期间,检测所述行驶体的姿势;
所述获取部获取表示检测出的所述行驶体的所述姿势的信息,以此作为所述状态信息;
所述判定部基于所获取的所述状态信息所表示的所述行驶体的所述姿势,判定所述飞行器能否着陆到所述对象地域。
(附记10)
根据附记1至9中任一附记所述的控制装置,其中
所述判定部基于所获取的所述状态信息,进一步判定所述飞行器能否从所述对象地域起飞。
(附记11)
一种系统,
具备在对象地域中行驶的行驶体、及控制装置;
该控制装置具有:
获取部,获取表示所述行驶体在所述对象地域中行驶期间所述对象地域的表面状态的状态信息;以及
判定部,基于所获取的所述状态信息,判定飞行器能否着陆到所述对象地域。
(附记12)
一种方法,具有以下步骤:
使行驶体在对象地域中行驶;
获取表示所述行驶体在所述对象地域中行驶期间所述对象地域的表面状态的状态信息;以及
基于所获取的所述状态信息,判定飞行器能否着陆到所述对象地域。
[符号说明]
1 配送系统
110 被覆体
190 移动终端
191、201、381、411 CPU
192、202、382、412 RAM
193a、203a、383a、413a ROM
193b、383b、413b 快闪存储器
194a、204a、384b 数据通信电路
194b 声音通信电路
195a、205a 视频卡
195b、205b 显示装置
195c、205c 输入装置
196、416 GPS电路
199a 扬声器
199b 麦克风
200、380、410、510 控制装置
203b 硬盘
210 获取部
220 飞行器控制部
230 行驶体控制部
240 判定部
250 更新部
260 通知部
290 信息存储部
300 行驶体
301、302 车轮
310 底盘
320、451、452、551 摄像装置
387 检测部
388、418 输入输出端口
389、419 驱动电路
390 固定金属件
400 搬运用飞行器
405 绞车
405a 滚筒
405b 支撑部件
414a 第1数据通信电路
414b 第2数据通信电路
421~424、521~524 螺旋桨臂
431~434、531~534 螺旋桨
443、543 支撑脚
500 配送用飞行器
541a 第1围持框
541b 第2围持框
542a、542b 导轨
H 高度
IN 因特网
p1~p12 点
pf1、pf2、ps1、ps2 花纹
sf 基准第1边
sf' 与基准第1边对向的边
ss 基准第2边
ss' 与基准第2边对向的边
vm 基准顶点
W 金属线。
- 控制装置、控制装置的控制程序、控制装置的控制方法、控制系统、终端装置、以及被控制装置
- 通信系统、用户设备、控制装置、通信系统控制方法、用户设备控制方法、以及控制装置控制方法