一种用于伺服驱动器的远程调试系统
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及伺服驱动器远程调试领域,具体涉及一种用于伺服驱动器的远程调试系统。
背景技术
伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,是传动技术的高端产品。伺服驱动器实际应用环境往往比较恶劣,在使用过程中一旦出现异常,技术人员想获取伺服驱动器运行的实时数据较为困难,调试/排故过程艰辛且效率低;
现有的调试上位机通过调试线连接伺服驱动器,工作人员借助上位机获取伺服驱动器数据,并对其运行状态进行分析;但是,现有技术一般应用在伺服驱动器研发阶段或者应用环境适合外接调试线的特殊情况,并不适合大多数伺服驱动器的实际运用场景,一旦伺服驱动器出现异常情况,必须派遣有经验的技术人员到现场才能解决问题,伺服驱动器异常数据的捕捉是漫长的过程,现有技术解决问题的效率低,耗费人力严重,在恶劣环境下调试/排故存在危害技术人员人身安全的隐患,对于伺服驱动器的维护和调试/排故并不是一个最优的选择;
因此亟待设计一种新型的调试系统,使伺服驱动器、人、远程控制平台互联达到在极其恶劣的环境中伺服驱动器摆脱外部接线的束缚,实现工作人员在远程长时间、实时获取伺服驱动器运行状态数据的目的;进一步,随着研发人员的技术提升推动伺服驱动器性能的优化,远程调试系统还可以远程升级伺服驱动器应用程序,实现伺服驱动器产品的远程代码更迭。
发明内容
本发明的目的在于提供一种用于伺服驱动器的远程调试系统,该系统既能满足对伺服驱动器远程调试/排故的功能,又能保证技术人员人身安全。
实现本发明目的的技术方案是:一种用于伺服驱动器的远程调试系统,包括远程控制平台、远程调试设备、伺服驱动器以及执行电机;
所述远程控制平台包括计算机与远程控制单元,通过远程调试设备远程控制伺服驱动器完成调试/排故功能或者升级功能;
所述远程调试设备包括主控芯片以及与主控芯片电性连接的通信模块、模式选择模块、调试信息通信模块、CAN通信模块、外接SRAM、SD卡、FLASH、网络连接状态指示灯和升级状态指示灯;所述通信模块通过串口总线与主控芯片电性连接,用于主控芯片和远程控制平台之间的通信,完成远程控制平台下发的伺服驱动器远程控制、状态信息上传以及bin文件下载功能;所述模式选择模块,用于引导远程调试设备执行远程调试/排故功能或者升级功能;所述调试信息通信模块借助调试线将远程调试设备与伺服驱动器电性连接,用于远程调试设备与伺服驱动器之间的信息交互;所述CAN通信模块还与伺服驱动器电性连接,用于实时监听伺服驱动器接收上层控制器的CAN报文信息;所述外接SRAM用于缓存远程控制平台下发的bin文件;所述FLASH用于存储远程控制平台下发的bin文件;所述SD卡保存伺服驱动器的运行状态信息;所述网络连接状态指示灯用于显示通信模块与远程控制平台的网络连接状态;所述升级状态指示灯用于显示伺服驱动器的离线升级状态;
所述伺服驱动器与远程调试设备的调试信息通信模块、CAN通信模块连接,同时与执行电机连接,用于接收主控芯片发送的控制信息并控制执行电机,同时将电机和伺服驱动器的状态信息上传至主控芯片。
进一步的,所述通信模块包括但不限于5G通信模组、4G通信模组、3G通信模组、2G通信模组、NB通信模组和/或WIFI通信模组。
进一步的,所述主控芯片为单片机或微控制器单元。
进一步的,所述伺服驱动器支持单通道或者多通道执行电机控制。
进一步的,所述SD卡保存最近半个小时内伺服驱动器的运行状态信息。
进一步的,所述模式选择模块包括调试、排故、离线升级和在线升级的选择,所述调试包括控制伺服驱动器的位置、速度和转矩的选择,以及控制所述执行电机的启动/停止。
进一步的,所述SD卡保存的伺服驱动器的运行状态信息包括:伺服驱动器实时运行状态、伺服驱动器一段时间内运行状态的波形和伺服驱动器接收的CAN报文指令;其中:
所述伺服驱动器实时运行状态包括:故障代码、位置信息、速度信息、转矩信息、三相电流信息、驱动器温度信息、母线电压信息和驱动器型号;
所述伺服驱动器一段时间内运行状态的波形包括:三相电流波形、位置指令值与位置实际值波形、速度指令值与速度实际值波形、转矩指令值与转矩实际值波形。
进一步的,所述系统支持远程在线升级功能和离线升级功能。
进一步的,所述在线升级功能具体为:远程控制平台下发bin文件至远程调试设备的外接SRAM中,当远程调试设备接收到完整的bin文件时,远程控制平台显示文件下载完毕;远程调试设备将外接SRAM数据通过调试线发送给伺服驱动器,待伺服驱动器接收完整bin文件时,远程控制平台显示伺服驱动器更新成功;在远程更新过程中,任意异常,远程控制平台均会显示伺服驱动器更新失败。
进一步的,所述离线升级功能具体为:伺服驱动器与远程调试设备连接,模式选择模块状态为离线升级,此时远程调试设备将预先存有bin文件的FLASH内容写入外接SRAM中,远程调试设备通过调试线将外接SRAM数据发送给伺服驱动器,待伺服驱动器接收完整bin文件时,升级状态指示灯会慢频率的亮灭交替闪烁,否则,升级状态指示灯会快频率的亮灭交替闪烁。
与现有技术相比,本发明具有如下有益效果:该系统借助物联网技术将传统的伺服驱动器调试系统迁移至服务器中实现远程调试/排故功能,既实现伺服驱动器在有网络连接的情况下的任意工况远程调试/排故功能,又能保证技术人员人身安全;该系统可远程实现伺服驱动器调试上位机的所有功能,同时还补充在线升级、离线升级、日志保存等功能,需要人力少且效率高;该系统实现工作人员在远程长时间、实时获取伺服驱动器运行状态数据的目的。
附图说明
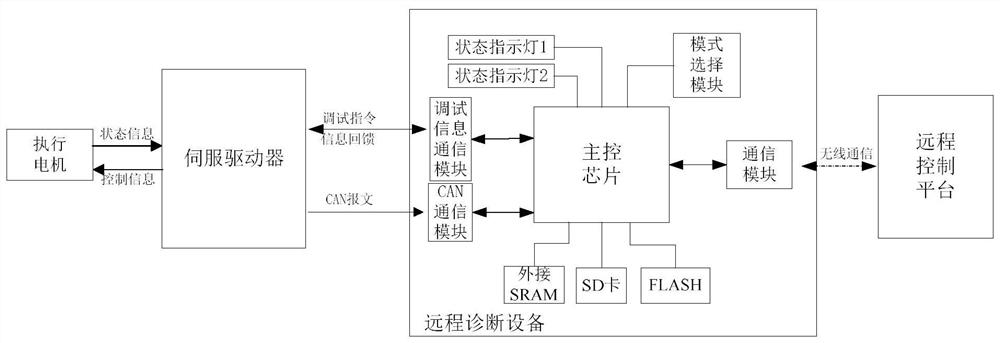
图1为本发明一种用于伺服驱动器的远程调试系统的结构示意图。
具体实施方式
上述说明仅是本发明技术方案的概述,为能够更清楚地了解发明的技术手段,可依照说明内容进行实践,并为了更好地展示本发明的设计原理、工作特点和特征优势,以下将结合附图对其进行详细说明。
本发明借助物联网技术将伺服驱动器、远程调试设备与远程控制平台通过无线网络形成一个智能网络,如图1所示,本发明提出一种用于伺服驱动器的远程调试系统,由远程控制平台、远程调试设备(图1中远程诊断设备)、伺服驱动器以及执行电机组成。
所述远程控制平台包含计算机与远程控制软件,所述远程调试设备预先知道所述远程控制软件服务端IP地址和端口号,发起通信请求;一旦所述远程调试设备与所述远程控制软件服务端建立连接,即可实现所述远程控制平台对所述远程调试设备以及所述伺服驱动器的无线控制;
所述远程调试设备包含主控芯片、通信模块、模式选择模块、调试信息通信模块、CAN通信模块、外接SRAM、SD卡、FLASH、网络连接状态指示灯和升级状态指示灯;
所述伺服驱动器支持单通道或者多通道电机控制;
所述主控芯片为微型控制器MCU(Micro Controller Unit,简称:MCU,中文名称:单片机)或者微处理器MPU(Micro Control Unit,简称:MPU,中文名称:微控制器单元);
所述通信模块与所述主控芯片通过串口总线电性相连,用于实现所述伺服驱动器远程控制、状态信息上传以及bin(binary,简称:bin,中文名称:二进制文件)文件下载功能,所述通信模块包括但不限于5G通信模组、4G通信模组、3G通信模组、2G通信模组、NB通信模组和/或WIFI通信模组;
所述模式选择模块与所述主控芯片电性连接,所述远程选择模块实际为拨码开关,所述远程调试设备通过读取拨码开关状态引导所述远程调试设备执行远程调试功能还是离线升级功能;
所述调试信息通信模块借助调试线将所述远程调试设备与所述伺服驱动器电性连接,用于所述远程调试设备与所述伺服驱动器之间的信息交互;
所述CAN通信模块与所述伺服驱动器电性连接,用于实时监听所述伺服驱动器接收上层控制器的CAN报文信息,所述远程调试设备每监听到10个CAN报文信息按照协议上报一次CAN报文数据;
所述外接SRAM与所述主控芯片电性连接,用于缓存所述远程控制平台下发的所述bin文件,实现所述伺服驱动器的远程升级功能;
所述FLASH与所述主控芯片电性连接,存储所述远程控制平台下发的所述bin文件,实现所述伺服驱动器的离线升级功能;
所述网络连接状态指示灯(图1中状态指示灯1)与所述主控芯片电性连接,用于显示所述通信模块与所述远程控制平台的网络连接状态;
所述升级状态指示灯(图1中状态指示灯2)与所述主控芯片电性连接,用于显示所述伺服驱动器离线升级状态;
应用现场在具备网络的环境下,所述用于伺服驱动器的远程调试系统可适应任意工况的远程调试/排故工作,技术人员通过操作所述远程控制平台下发调试/排故指令,借助所述远程调试设备透传指令的方式,实现远程监测所述伺服驱动器运行状态,控制所述伺服驱动器的运行模式;
技术人员通过所述远程控制平台对所述伺服驱动器运动控制,具体包括:所述伺服驱动器位置/速度/转矩模式选择,控制所述执行电机启动/停止;
技术人员通过所述远程控制平台对所述伺服驱动器伺服参数导入,重启以及故障清除功能;
技术人员通过所述远程控制平台对所述伺服驱动器运行状态监测,具体有以下三个部分:
监测所述伺服驱动器实时运行状态,其中包括:故障代码、位置信息、速度信息、转矩信息、三相电流信息、驱动器温度信息、母线电压信息、驱动器型号;具体操作为:技术人员控制所述远程控制平台实时下发数据采集指令,所述远程调试设备接收到数据采集指令后与所述伺服驱动器进行数据交互,并将获取到的所述伺服驱动器运行状态信息上传给所述远程控制平台,实现远程监测所述伺服驱动器实时运行状态;
监测所述伺服驱动器一段时间的运行状态的波形,具体包括:三相电流波形,位置指令值与位置实际值、速度指令值与速度实际值、转矩指令值与转矩实际值;具体操作为:技术人员控制所述远程控制平台实时下发数据追踪指令,所述远程调试设备接收到数据追踪指令后与所述伺服驱动器进行数据交互,并将获取到的所述伺服驱动器数据追踪信息存于所述外接SRAM中,待数据追踪数据获取完毕后统一上传给所述远程控制平台,实现快速监测所述伺服驱动器一段时间的运行状态的波形;
监听所述伺服驱动器接收的CAN报文指令,所述远程调试设备可实时监听所述上层控制器发送的CAN报文,所述远程控制平台实时显示监听的CAN报文信息;
所述SD卡保存最近半个小时内所述伺服驱动器的运行状态信息;
所述用于伺服驱动器的远程调试系统,在网络通信正常情况下,支持远程升级功能;所述远程控制平台下发所述bin文件至所述远程调试设备的所述外接SRAM中,当所述远程调试设备接收到完整的所述bin文件时,所述远程控制平台显示文件下载完毕;所述远程调试设备继续将所述外接SRAM数据通过所述调试线发送给所述伺服驱动器,待所述伺服驱动器接收完整所述bin文件时,所述远程控制平台显示所述伺服驱动器更新成功;在远程更新过程中,任意异常,所述远程控制平台均会显示所述伺服驱动器更新失败;
所述用于伺服驱动器的远程调试系统,在网络通信受限制的情况下,支持离线升级功能;具体的,技术人员将所述伺服驱动器与所述远程调试设备连接,选择所述模式选择模块状态为所述离线升级模式,此时所述远程调试设备将预先存有所述bin文件的所述FLASH内容写入所述外接SRAM中,所述远程调试设备通过所述调试线将所述外接SRAM数据发送给所述伺服驱动器中,待所述伺服驱动器接收完整所述bin文件时,所述升级状态指示灯会慢频率的亮灭交替闪烁,否则,所述升级状态指示灯会快频率的亮灭交替闪烁;现场技术人员可通过所述升级状态指示灯的闪烁情况确定所述伺服驱动器离线下载成功/失败。
- 一种用于伺服驱动器的远程调试系统
- 一种应用于采煤机的远程调试系统