一种陶缸自动生产系统联动换模机构及操作方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及陶瓷生产领域,具体涉及一种陶缸自动生产系统联动换模机构及操作方法。
背景技术
陶瓷产品的生产过程是指从投入原料开始,一直到把陶瓷产品生产出来为止的全过程。一般来说,陶瓷生产过程包括坯料制造、坯体成型、瓷器烧结等三个基本阶段。陶瓷酒缸作为一种陶瓷产品,被广泛应用于酿酒行业中。在大型的陶缸胚体生产过程中,先用泥料在陶缸模具上成型,待泥料硬化后进行脱模形成陶缸胚体。目前大型陶缸生产模具如图1所示,包括上盖模具01和下缸模具02,其中上盖模具01和下缸模具02从陶缸中上部分界,下缸模具02底部还滑配设有缸底模具03,成型的陶缸胚体位于上盖模具和下缸模具的内表面。
目前对于大型陶缸的生产基本都是采用传统工艺,大多是以单件小批量模式进行生产,主要依靠人工进行制胚。制胚过程大致为先在上盖模具和下缸模具内表面分别成型上盖胚体和下缸胚体,然后将成型工位上的上盖模具和下缸模具吊至合模工位,并将上盖模具翻转后与下缸模具进行合模,使上盖胚体与下缸胚体粘接形成整个陶缸胚体,然后再将待成型工位上的上盖模具和下缸模具分别吊至上盖成型工位和下缸成型工位上进行下一轮制胚。上述制胚过程中上盖模具和下缸模具的换模是由人工进行操作,换模吊运操作具有先后顺序,换模花费时间长、效率低,且人工吊运操作劳动强度大。因此,有必要对陶缸制胚过程中的换模工艺进行改进。
发明内容
本发明目的在于:针对目前陶缸制胚过程中换模工艺所存在的换模花费时间长、效率低及劳动强度大的问题,提供一种陶缸自动生产系统联动换模机构及操作方法,该机构通过在将成型工位的模具吊至合模工位时同步将待成型工位的模具吊至成型工位,极大地节约了换模时间,提高了生产效率,且相比传统人工换模降低了劳动强度。
为了实现上述目的,本发明采用的技术方案为:
一种陶缸自动生产系统联动换模机构,包括第一换模机构、第二换模机构和轨道架,所述第一换模机构用于夹持下缸成型工位和下缸待成型工位的两个下缸模具,且所述第一换模机构沿轨道架横移后能将下缸成型工位的下缸模具吊至合模工位且同步将下缸待成型工位的下缸模具吊至下缸成型工位,所述第二换模机构用于夹持上盖成型工位和上盖待成型工位的两个上盖模具,且所述第二换模机构沿轨道架横移后能将上盖成型工位的上盖模具吊至合模工位且同步将上盖待成型工位的上盖模具吊至上盖成型工位。
本发明通过设置第一换模机构、第二换模机构和轨道架,通过第一换模机构夹持下缸成型工位和下缸待成型工位的两个下缸模具,并使第一换模机构沿轨道架横移后能将下缸成型工位的下缸模具吊至合模工位且同步将下缸待成型工位的下缸模具吊至下缸成型工位,通过第二换模机构夹持上盖成型工位和上盖待成型工位的两个上盖模具,并使第二换模机构沿轨道架横移后能将上盖成型工位的上盖模具吊至合模工位且同步将上盖待成型工位的上盖模具吊至上盖成型工位;该联动换模机构极大地节约了换模时间,提高了生产效率,且相比传统人工换模降低了劳动强度。
作为本发明的优选方案,所述第一换模机构包括两个用于夹持下缸模具的下缸机械手,每个下缸机械手上方设有下缸机械手提升装置,两个下缸机械手提升装置设于轨道架上并能够沿轨道架同步横移,所述第二换模机构包括两个用于夹持上盖模具的上盖机械手,每个上盖机械手上方设有上盖机械手提升装置,两个上盖机械手提升装置设于轨道架上并能够沿轨道架同步横移。
使用时通过两个下缸机械手分别夹持两个下缸模具,利用下缸机械手提升装置提升下缸模具,并使两个下缸机械手提升装置沿轨道架同步横移,可以实现在将成型后的下缸模具移动至合模工位的同时将待成型的下缸模具放入成型工位;通过两个上盖机械手分别夹持两个上盖模具,利用上盖机械手提升装置提升上盖模具,并使两个上盖机械手提升装置沿轨道架同步横移,可以实现在将成型后的上盖模具翻转并移动至合模工位的同时将待成型的上盖模具放入成型工位,从而提高制胚过程中换模与合模的效率。
作为本发明的优选方案,所述下缸机械手和上盖机械手上均相对设有两个夹持头,所述夹持头相对于下缸模具和上盖模具的中心能够进行伸缩。通过在下缸机械手和上盖机械手上均相对设有两个夹持头,利用两个夹持头相对伸缩,可以实现对下缸模具和上盖模具的夹紧与松开。
作为本发明的优选方案,在靠近合模工位的上盖机械手上还设有翻转驱动件,所述翻转驱动件用于驱动夹持头绕水平轴线进行回转,从而实现对成型工位的上盖模具进行翻转,以便后续吊至下缸模具上方后直接下放合模。
作为本发明的优选方案,所述翻转驱动件为伺服电机,在夹持头将上盖模具夹紧后,所述伺服电机通过带动夹持头整体转动实现上盖模具的翻转。
作为本发明的优选方案,所述下缸机械手提升装置和上盖机械手提升装置上均设有升降机构,所述升降机构的下端与下缸机械手和上盖机械手的顶部连接,从而带动下缸机械手和上盖机械手整体升降运动,进而实现对下缸模具和上盖模具的提升与下放。
作为本发明的优选方案,所述升降机构为液压缸结构、气缸结构、丝杆螺母结构中的一种。
作为本发明的优选方案,所述下缸机械手提升装置和上盖机械手提升装置上均设有横移驱动件,所述横移驱动件用于驱动所述下缸机械手提升装置和上盖机械手提升装置在轨道架上进行整体横移运动。
作为本发明的优选方案,所述横移驱动件为伺服电机,所述伺服电机驱动下缸机械手提升装置和上盖机械手提升装置上的滚轮沿轨道架行走。
一种陶缸自动生产系统联动换模机构操作方法,包括以下步骤:
步骤一、通过两个下缸机械手分别夹持下缸成型工位和下缸待成型工位的两个下缸模具,利用下缸机械手提升装置提升两个下缸模具,并使两个下缸机械手提升装置沿轨道架同步横移将下缸成型工位的下缸模具吊至合模工位上方且同步将下缸待成型工位的下缸模具吊至下缸成型工位上方,再利用下缸机械手提升装置下放两个下缸模具至合模工位和下缸成型工位上;
步骤二、通过两个上盖机械手分别夹持上盖成型工位和上盖待成型工位的两个上盖模具,利用上盖机械手提升装置提升两个上盖模具,并对上盖成型工位的上盖模具进行翻转,然后使两个上盖机械手提升装置沿轨道架同步横移将上盖成型工位的上盖模具吊至合模工位上方且同步将上盖待成型工位的上盖模具吊至上盖成型工位上方,再利用上盖机械手提升装置下放两个上盖模具,使翻转后的上盖模具与合模工位上的下缸模具实现合模,另一个上盖模具则位于上盖成型工位上。
通过上述换模机构操作方法,可以实现在将成型工位的下缸模具和上盖模具吊至合模工位的同时同步将待成型工位的下缸模具和上盖模具吊至成型工位,极大地节约了换模时间,提高了生产效率,且相比传统人工换模降低了劳动强度,且操作控制简单容易。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
本发明通过设置第一换模机构、第二换模机构和轨道架,通过第一换模机构夹持下缸成型工位和下缸待成型工位的两个下缸模具,并使第一换模机构沿轨道架横移后能将下缸成型工位的下缸模具吊至合模工位且同步将下缸待成型工位的下缸模具吊至下缸成型工位,通过第二换模机构夹持上盖成型工位和上盖待成型工位的两个上盖模具,并使第二换模机构沿轨道架横移后能将上盖成型工位的上盖模具吊至合模工位且同步将上盖待成型工位的上盖模具吊至上盖成型工位;该联动换模机构极大地节约了换模时间,提高了生产效率,且相比传统人工换模降低了劳动强度。
附图说明
图1为现有的大型陶缸模具示意图。
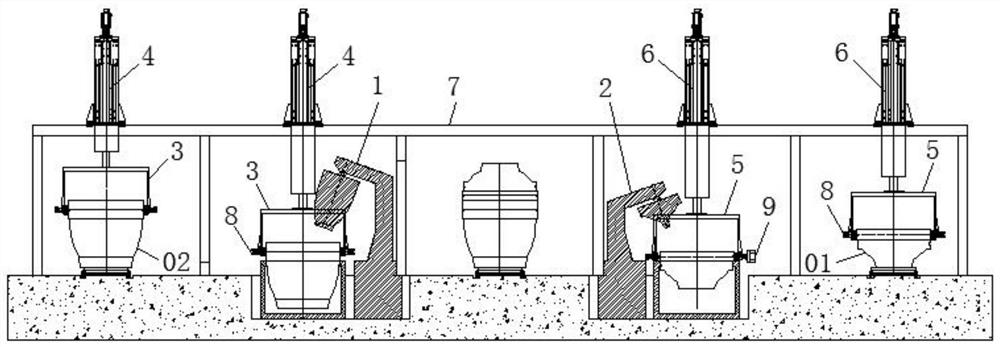
图2为本发明中的陶缸自动生产系统联动换模机构立面图。
图3为本发明中的陶缸自动生产系统联动换模机构平面图。
图中标记:01-上盖模具,02-下缸模具,03-缸底模具,1-下缸成型机,2-上盖成型机,3-下缸机械手,4-下缸机械手提升装置,5-上盖机械手,6-上盖机械手提升装置,7-轨道架,8-夹持头,9-翻转驱动件。
具体实施方式
下面结合附图,对本发明作详细的说明。
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
实施例1
本实施例提供一种陶缸自动生产系统联动换模机构;
如图1-图3所示,本实施例中的陶缸自动生产系统联动换模机构,包括第一换模机构、第二换模机构和轨道架7,所述第一换模机构用于夹持下缸成型工位和下缸待成型工位的两个下缸模具02,且所述第一换模机构沿轨道架7横移后能将下缸成型工位的下缸模具吊至合模工位且同步将下缸待成型工位的下缸模具吊至下缸成型工位,所述第二换模机构用于夹持上盖成型工位和上盖待成型工位的两个上盖模具01,且所述第二换模机构沿轨道架7横移后能将上盖成型工位的上盖模具吊至合模工位且同步将上盖待成型工位的上盖模具吊至上盖成型工位。
本发明通过设置第一换模机构、第二换模机构和轨道架,通过第一换模机构夹持下缸成型工位和下缸待成型工位的两个下缸模具,并使第一换模机构沿轨道架横移后能将下缸成型工位的下缸模具吊至合模工位且同步将下缸待成型工位的下缸模具吊至下缸成型工位,通过第二换模机构夹持上盖成型工位和上盖待成型工位的两个上盖模具,并使第二换模机构沿轨道架横移后能将上盖成型工位的上盖模具吊至合模工位且同步将上盖待成型工位的上盖模具吊至上盖成型工位;该联动换模机构极大地节约了换模时间,提高了生产效率,且相比传统人工换模降低了劳动强度。
本实施例中,所述第一换模机构包括两个用于夹持下缸模具02的下缸机械手3,每个下缸机械手3上方设有下缸机械手提升装置4,两个下缸机械手提升装置4设于轨道架7上并能够沿轨道架7同步横移,所述第二换模机构包括两个用于夹持上盖模具01的上盖机械手5,每个上盖机械手5上方设有上盖机械手提升装置6,两个上盖机械手提升装置6设于轨道架7上并能够沿轨道架7同步横移。
使用时通过两个下缸机械手分别夹持两个下缸模具,利用下缸机械手提升装置提升下缸模具,并使两个下缸机械手提升装置沿轨道架同步横移,可以实现在将成型后的下缸模具移动至合模工位的同时将待成型的下缸模具放入成型工位;通过两个上盖机械手分别夹持两个上盖模具,利用上盖机械手提升装置提升上盖模具,并使两个上盖机械手提升装置沿轨道架同步横移,可以实现在将成型后的上盖模具翻转并移动至合模工位的同时将待成型的上盖模具放入成型工位,从而提高制胚过程中换模与合模的效率。
需要加以说明的是,下缸成型机1与上盖成型机2之间区域为合模工位,下缸成型机1旁边与合模工位相对的区域为下缸待成型工位,上盖成型机2旁边与合模工位相对的区域为上盖待成型工位。同时,下缸成型工位到合模工位的距离与下缸待成型工位到下缸成型工位的距离相同;上盖成型工位到合模工位的距离与上盖待成型工位到上盖成型工位的距离相同。
本实施例中,所述下缸机械手3和上盖机械手5上均相对设有两个夹持头8,所述夹持头8相对于下缸模具和上盖模具的中心能够进行伸缩。通过在下缸机械手和上盖机械手上均相对设有两个夹持头,利用两个夹持头相对伸缩,可以实现对下缸模具和上盖模具的夹紧与松开。所述夹持头8可以为气缸夹持头或者液压缸夹持头。
本实施例中,在靠近合模工位的上盖机械手5上还设有翻转驱动件9,所述翻转驱动件9用于驱动夹持头8绕水平轴线进行回转,从而实现对成型工位的上盖模具进行翻转,以便后续吊至下缸模具上方后直接下放合模。
本实施例中,所述翻转驱动件9为伺服电机,在夹持头8将上盖模具夹紧后,所述伺服电机通过带动夹持头8整体转动实现上盖模具的翻转,同时采用伺服电机带动上盖模具翻转,便于精确控制上盖模具的翻转角度,有利于提高后续合模操作的精确度。
本实施例中,所述下缸机械手提升装置4和上盖机械手提升装置6上均设有升降机构,所述升降机构的下端与下缸机械手和上盖机械手的顶部连接,从而带动下缸机械手和上盖机械手整体升降运动,进而实现对下缸模具和上盖模具的提升与下放。为了便于换模操作,每个下缸机械手3和上盖机械手5的升降运动可以单独控制,即两个下缸机械手无需同步升降,两个上盖机械手也无需同步升降。
本实施例中,所述升降机构为液压缸结构、气缸结构、丝杆螺母结构中的一种。采用液压缸结构和气缸结构时,液压缸和气缸的活塞杆与下缸机械手和上盖机械手的顶部连接,控制活塞杆向下伸缩运动,实现下缸机械手和上盖机械手的上下升降;采用丝杆螺母结构时,电机带动丝杆转动,而丝杆上的螺母通过连接件与下缸机械手和上盖机械手的顶部连接,螺母沿丝杆上下直线运动带动下缸机械手和上盖机械手的上下升降。
本实施例中,所述下缸机械手提升装置4和上盖机械手提升装置6上均设有横移驱动件,所述横移驱动件用于驱动所述下缸机械手提升装置4和上盖机械手提升装置6在轨道架7上进行整体横移运动。
本实施例中,所述横移驱动件为伺服电机,所述伺服电机驱动下缸机械手提升装置和上盖机械手提升装置上的滚轮沿轨道架行走,同时采用伺服电机驱动后,便于精确控制下缸机械手提升装置和上盖机械手提升装置的横移位置。当然,也可以先调整好两个下缸机械手提升装置的横向位置后,将两个下缸机械手提升装置进行刚性连接,通过一个下缸机械手提升装置横移来带动另一个下缸机械手提升装置同步横移。同理,两个上盖机械手提升装置也可以采用上述同步横移方案。
实施例2
本实施例提供一种如实施例1中所述的陶缸自动生产系统联动换模机构的操作方法,包括以下步骤:
步骤一、通过两个下缸机械手3分别夹持下缸成型工位和下缸待成型工位的两个下缸模具02,利用下缸机械手提升装置4提升两个下缸模具02,并使两个下缸机械手提升装置4沿轨道架7同步横移将下缸成型工位的下缸模具吊至合模工位上方且同步将下缸待成型工位的下缸模具吊至下缸成型工位上方,再利用下缸机械手提升装置4下放两个下缸模具至合模工位和下缸成型工位上;
步骤二、通过两个上盖机械手5分别夹持上盖成型工位和上盖待成型工位的两个上盖模具01,利用上盖机械手提升装置6提升两个上盖模具01,并对上盖成型工位的上盖模具进行翻转,然后使两个上盖机械手提升装置6沿轨道架7同步横移将上盖成型工位的上盖模具吊至合模工位上方且同步将上盖待成型工位的上盖模具吊至上盖成型工位上方,再利用上盖机械手提升装置6下放两个上盖模具,使翻转后的上盖模具与合模工位上的下缸模具实现合模,另一个上盖模具则位于上盖成型工位上。
通过上述换模机构操作方法,可以实现在将成型工位的下缸模具和上盖模具吊至合模工位的同时同步将待成型工位的下缸模具和上盖模具吊至成型工位,极大地节约了换模时间,提高了生产效率,且相比传统人工换模降低了劳动强度,且操作控制简单容易。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的原理之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种陶缸自动生产系统联动换模机构及操作方法
- 一种陶缸自动生产系统联动换模机构