一种潜艇的转向装置
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及船舶领域的一种潜艇,特别涉及一种潜艇的转向装置。
背景技术
潜艇实现水平面转向运动与垂直面潜浮运动,都主要是通过舵的作用实现的。打舵时,舵上的水动力提供了垂直于艇体的垂向力或横向力,从而使潜艇实现运动状态的改变。舵的水动力性能直接影响潜艇的操纵性,因此舵的性能研究与优化设计始终是潜艇操纵性研究中的热点问题。舵的剖面翼型优化设计是提供舵水动力性能的重要途径,应用较广的翼型剖面主要有包括NACA系列、儒柯夫斯基НЕЖ系列和ЦАГИ系列、 Gottigen系列以及JFS系列等。
目前现有的潜艇尾翼包括两个水平尾翼和两个竖直尾翼,潜艇尾翼过大,耗材多,成本高;潜艇在转向过程中,转向速度慢,转向时间长,转向半径大,晃动幅度高,操作复杂,需要反复调整,若在潜艇遭遇与其他船舶及障碍物发生碰撞或被袭击等危险时,常使潜艇不能及时规避,从而造成事故,甚至造成人员伤亡,现有潜艇在转向过程中,桨盘面处流场具有强烈的周向不均匀性,会使潜艇发生转向漂移,危险系数高。
发明内容
为了解决上述技术问题,本发明实施例提供了一种潜艇的转向装置,包括第一稳定翼、第一转动舵、第二稳定翼、第二转动舵、第三稳定翼、第三转动舵、第四稳定翼和第四转动舵,所述第一稳定翼、第二稳定翼、第三稳定翼和第四稳定翼与艇身连接,所述第一稳定翼与水平面呈45°,所述第一稳定翼、第二稳定翼、第三稳定翼和第四稳定翼呈十字型分布,所述第一稳定翼与所述第一转动舵铰接,所述第二稳定翼与所述第二转动舵铰接,所述第三稳定翼与所述第三转动舵铰接,所述第四稳定翼与所述第四转动舵铰接。
进一步地,所述第一稳定翼与所述第一转动舵通过第一舵机的转动轴铰接,所述第二稳定翼与所述第二转动舵通过第二舵机的转动轴铰接,所述第三稳定翼与所述第三转动舵通过第三舵机的转动轴铰接,所述第四稳定翼与所述第四转动舵通过第四舵机的转动轴铰接。
进一步地,所述第一舵机、第二舵机、第三舵机和第三舵机与控制器连接。
实施本发明实施例,具有如下有益效果:通过第一转动舵、第二转动舵、第三转动舵和第四转动舵与水平面呈45°,潜艇在转向过程,转向速度提升,转向时间缩短,转向半径大大缩短,转向平畅,晃动弧度小,操作方便,从而使潜艇快速规避障碍物及船舶,或在遭遇袭击时快速逃离敌方射击范围和射击角度;第一稳定翼、第一转动舵、第二稳定翼、第二转动舵、第三稳定翼、第三转动舵、第四稳定翼和第四转动舵长度小于现有技术的水平竖直尾翼,材料消耗减少,节约成本,降低阻力,提升潜艇速度;本发明还可使潜艇在悬停状态下进行转向上下浮运动。
附图说明
为了更清楚地说明本发明所述的潜艇的转向装置,下面将对实施例所需要的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
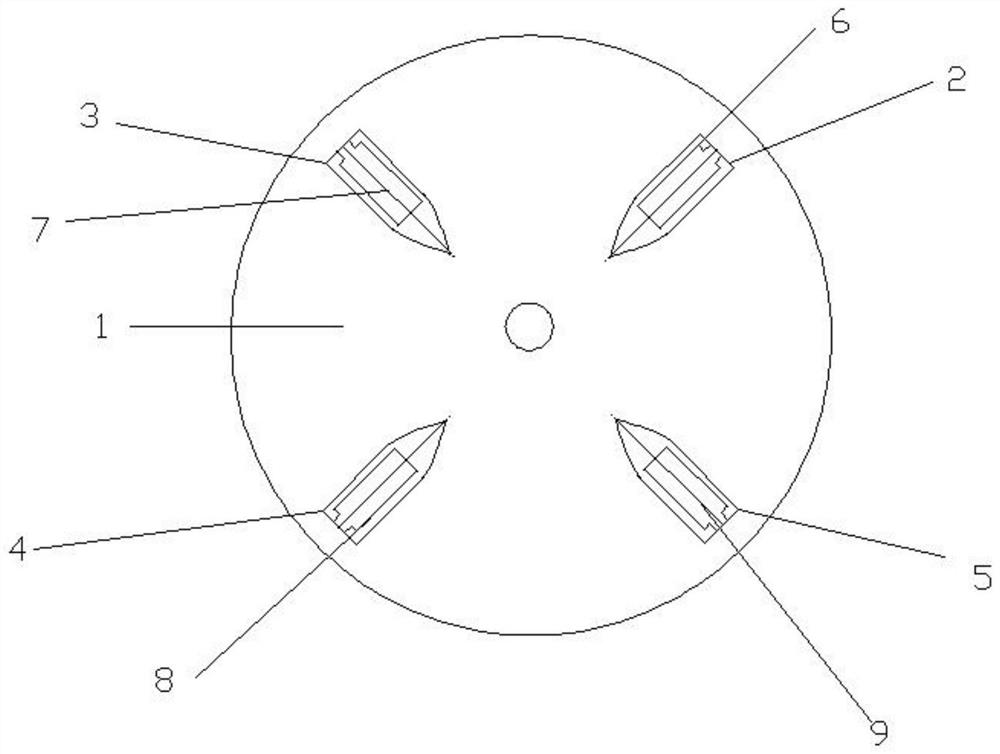
图1为本发明所述潜艇的转向装置后视图;
图2为本发明所述潜艇的转向装置俯视图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例:
如图1至图2所示,一种潜艇的转向装置,包括第一稳定翼2、第一转动舵6、第二稳定翼3、第二转动舵7、第三稳定翼4、第三转动舵8、第四稳定翼5和第四转动舵9,所述第一稳定翼2、第二稳定翼3、第三稳定翼 4和第四稳定翼5与艇身1连接,所述第一稳定翼2与水平面呈45°,所述第一稳定翼2、第二稳定翼3、第三稳定翼4和第四稳定翼5呈十字型分布,所述第一稳定翼2与所述第一转动舵6铰接,所述第二稳定翼3与所述第二转动舵7铰接,所述第三稳定翼4与所述第三转动舵8铰接,所述第四稳定翼5与所述第四转动舵9铰接。
具体地,所述第一稳定翼2、第二稳定翼3、第三稳定翼4和第四稳定翼5呈十字型固定在艇身1固定连接,所述第一稳定翼2与水平面呈45°,所述第一稳定翼2与第三稳定翼4呈一条直线,所述第二稳定翼3与第四稳定翼5呈一条直线,所述第一稳定翼2、第二稳定翼3、第三稳定翼4和第四稳定翼5相邻两个之间呈垂直分布。
具体地,所述第一转动舵6与水平面呈45°,第一转动舵6、第二转动舵7、第三转动舵8和第四转动舵9呈十字型分布,所述第一转动舵6与第三转动舵8呈一条直线,所述第二转动舵7与第四转动舵9呈一条直线,所述第一转动舵6、第二转动舵7、第三转动舵8和第四转动舵9相邻两个之间呈垂直分布。
优选地,所述第一稳定翼2与所述第一转动舵6通过第一舵机的转动轴铰接,所述第二稳定翼3与所述第二转动舵7通过第二舵机的转动轴铰接,所述第三稳定翼4与所述第三转动舵8通过第三舵机的转动轴铰接,所述第四稳定翼5与所述第四转动舵9通过第四舵机的转动轴铰接。
具体地,所述第一舵机工作,第一转动舵6相对与第一稳定翼2转动,所述第二舵机工作,第二转动舵7相对与第二稳定翼3转动,所述第三舵机工作,第三转动舵8相对与第三稳定翼4转动,所述第四舵机工作,第四转动舵9相对与第四稳定翼5转动。
优选地,所述第一舵机、第二舵机、第三舵机和第三舵机与控制器连接。通过控制器控制第一舵机、第二舵机、第三舵机和第三舵机工作,控制第一转动舵6、第二转动舵7、第三转动舵8和第四转动舵9的转动幅度,通过第一转动舵6、第二转动舵7、第三转动舵8和第四转动舵9转动,控制潜艇左右转向上下浮。
现有技术中十字型潜艇尾翼,两个尾翼为水平状,两个尾翼呈竖直状,所述现有尾翼包括稳定翼和转动舵,现有转动舵长度为D,与转动舵连接处艇身1半径为R,本技术中第一转动舵6、第二转动舵7、第三转动舵8和第四转动舵9长度相同,由于本技术中第一转动舵6与水平面呈45°,第一转动舵6、第二转动舵7、第三转动舵8和第四转动舵9长度d为现有技术十字型潜艇尾翼末端连接成正方形的内切圆半径r减去与转动舵连接处艇身1半径为R,d<D,潜艇在上下浮和转向过程中,第一转动舵6、第二转动舵7、第三转动舵8和第四转动舵9都发生转动,使潜艇尾部流场更加均匀,稳定好,螺旋桨噪声降低。在相同的速度下,与现有技术潜艇转向装置相比,现有技术共翼型尾翼的竖直转动舵转动5°,本发明第二转动舵 7和第四转动舵9转动5°,第一转动舵6和第三转动舵8转动5°,所述本发明转角速度快,潜艇尾部偏转力矩和漂角水动力大,使潜艇转向快,转向时间短,转向半径小,转向平畅,晃动弧度小,操作方便。
上述说明已经充分揭露了本发明的具体实施方式。需要指出的是,熟悉该领域的技术人员对本发明的具体实施方式所做的任何改动均不脱离本发明的权利要求书的范围。相应地,本发明的权利要求的范围也并不仅仅局限于前述具体实施方式。
- 一种潜艇的转向装置
- 一种转向装置及使用该转向装置的转向总成和工件周转车