无人航空器及检查方法
文献发布时间:2023-06-19 11:06:50
技术领域
本公开涉及封闭空间的检查技术,特别涉及使用无人航空器的检查技术。
背景技术
例如在火力发电厂中使用的锅炉等燃烧炉在运转开始后需要定期地停止运转,且需要作业者通过进入内部等来进行保养检查。在该保养检查时,需要使炉内的检查部位的位置(检查位置)明确,但燃烧炉的容量大而难以通过目视来正确地掌握检查位置。因此,以往存在通过利用卷尺对检查部位的高度位置及左右位置等进行测定并标记从而掌握检查位置的方法,但在该方法中,需要架设作业人员的脚手架或设置吊舱,而需要大量的劳力、成本以及查点期间。
另一方面,在对室外的构造物进行的检查中,也存在通过使用无人机及GPS(Global Positioning System)而能够不需要架设脚手架的无人查点技术。但是,即使想要将该方法应用于锅炉、烟囱等构造物的内部的查点,由于来自卫星的电波不能到达,也不能基于GPS掌握飞行位置,而不能进行稳定的操纵。因此,难以将这样的查点技术应用于构造物的内部的查点。
针对这样的课题,例如在专利文献1中公开了一种无人悬浮机(无人航空器),该无人悬浮机搭载有距离计测部(例如激光扫描仪、超声波传感器等)和拍摄部等且例如具备螺旋桨等悬浮机构,该距离计测部计测与锅炉(锅炉火炉)等构造物的内壁面之间的距离,该拍摄部拍摄构造物的壁面侧的构造体(例如配管、接头等)。并且,能够基于距离计测部的信息(信号)等来得到拍摄部的拍摄位置的信息,能够对构造物的内部进行无人的查点。
需要说明的是,在专利文献2中公开了能够适当地对在成为噪声源的物体的背后存在的监视对象物进行检测的扫描式测距装置的信号处理装置。另外,在非专利文献1中公开了能够用单一方向的激光来测定多个反射光的多回波传感器。在该非专利文献1中公开了如下主旨:相对于在以往的侧域传感器中根据最初返回的回波来算出距离值,当在多回波传感器中返回了多个回波(反射波)时,能够针对每个回波得到距离值,因此具有由光透过物质、物体的边界、雨、露水、雪等引起的噪声影响较强的这样的特征。
现有技术文献
专利文献
专利文献1:日本特开2016-15628号公报
专利文献2:日本特开2012-242189号公报
非专利文献
非专利文献1:佐藤功太、另一人著,《关于能够取得多回波的测域传感器的性质的研究》,2012年5月27日
发明内容
发明要解决的课题
然而,例如当对如燃烧炉的内部那样不能从外部利用GPS等位置捕捉用机构的空间(以下记为封闭空间)在运转开始后进行保养检查时,在燃烧炉等的内部堆积有由于此前的运转而产生的燃烧灰等煤尘。在使用具有螺旋桨等的无人航空器来进行这样的封闭空间的保养检查的情况下,由于由螺旋桨等产生的气流而使堆积的煤尘飞扬。因此,在以不存在这样的煤尘(反射源)为前提的侧域传感器中,重新了解到由于由悬浮在封闭空间内的无数的煤尘引起的反射波的影响,而不能适当地计测无人航空器与炉壁的内壁面之间的距离。另外,也考虑通过事先撒水等以使堆积的煤尘不会因无人航空器的飞行飞散,从而抑制堆积物的飞散,但需要这样的事先作业。
鉴于上述问题,本发明的至少一实施方式的目的在于提供一种即使是在封闭空间内存在煤尘等反射物的情况也能够精度良好地测定与静止物之间的距离的无人航空器。
用于解决课题的方案
(1)本发明的至少一实施方式的无人航空器构成为在封闭空间内飞行,
所述无人航空器具备:
机体;
推力产生机构,其构成为产生用于所述机体在空中飞行的推力;以及
测长机构,其搭载于所述机体,
所述测长机构具有:
发送部,其构成为发送测定波;
接收部,其构成为接收所述测定波的反射波;以及
距离算出部,其构成为基于由所述接收部多次接收的、从所述发送部发送出的所述测定波的所述反射波,来算出与存在于所述封闭空间内的静止物之间的距离。
根据上述(1)的结构,例如无人机等无人航空器具备测长机构,该测长机构基于从发送部发送出的例如脉冲激光、毫米波等测定波的反射波,来测定与静止物(内壁面)之间的距离,该静止物是例如形成锅炉等燃烧炉、烟囱等的壁面等。该测长机构能够基于针对发送出的测定波(脉冲)而接收多个反射波,来测定与静止物之间的距离。这样,通过基于多个反射波来测定与静止物之间的距离,即使是在测长机构(接收部)与静止物之间存在燃烧灰等煤尘的情况,也能够精度良好地测定与静止物之间的距离,也能够实现由无人航空器进行封闭空间内的检查。
即,例如当在燃烧炉运转后对燃烧炉等的内部空间(封闭空间)进行保养查点的情况下,因无人航空器飞行而使堆积在封闭空间的燃烧灰等煤尘飞扬,因此在测长机构与静止物之间存在悬浮的无数煤尘。因此,从发送部发送出的测定波除了从静止物反射之外,还从在与该静止物之间悬浮的煤尘反射,因此接收部接收(检测)在各种位置反射而得到的多个反射波。然而,若以在与静止物之间不存在煤尘且接收仅来自静止物的反射波的情况为前提来测定距离,则无法正确地测定与静止物之间的距离。然而,如上所述,测长机构通过基于多个反射波测定与静止物之间的距离,能够精度良好地测定与静止物之间的距离。
另外,若基于由测长机构测定出的距离来求出无人航空器在封闭空间内的位置,则能够精度良好地算出该位置,因此能够精度良好地求出检查位置、能够使无人航空器沿着通过预先决定等而得到的飞行路径自主地飞行。因此,也能够使由无人航空器进行的封闭空间内的检查高效化。
(2)在几个实施方式中,在上述(1)的结构的基础上,
所述测长机构测定至少水平方向上的到所述静止物的距离。
根据上述(2)的结构,由测长机构测定存在于至少水平方向上的与静止物之间的距离。由此,可以提供能够以无人的方式检查封闭空间的无人航空器。需要说明的是,对于铅垂方向的距离(高度),也可以使用例如气压计等其他机构。
(3)在几个实施方式中,在上述(1)或(2)的结构的基础上,
所述推力产生机构包括螺旋桨,
所述发送部包括水平发送部,所述水平发送部构成为在水平方向上发送所述测定波,
所述接收部包括水平接收部,所述水平接收部构成为接收从所述水平发送部发送出的所述测定波的所述反射波,
所述水平发送部以及所述水平接收部设置在比所述螺旋桨靠上方的位置。
根据上述(3)的结构,无人航空器是以螺旋桨为推力产生机构的、例如无人机等。另外,测长机构具有测定水平方向上的与静止物之间的距离的发送部(水平发送部)及接收部(水平接收部),并且该水平发送部及水平接收部以位于无人航空器的机体中的螺旋桨的上方的方式设置于机体。本发明人们发现,由于螺旋桨的旋转而悬浮的煤尘主要悬浮在螺旋桨的下方。因此,通过使测定水平方向上的与静止物之间的距离的测长机构位于螺旋桨的上方,能够在悬浮于与静止物之间的煤尘较少那样的环境下,测定位于水平方向上的与静止物之间的距离。因此,能够实现水平方向上的上述距离的测定精度的提高。
(4)在几个实施方式中,在上述(1)~(3)的结构的基础上,
所述发送部包括铅垂发送部,所述铅垂发送部构成为向铅垂方向的下方发送所述测定波,
所述接收部包括铅垂接收部,所述铅垂接收部构成为接收从所述铅垂发送部发送出的所述测定波的所述反射波。
根据上述(4)的结构,测长机构具有用于测定铅垂方向上的与静止物之间的距离(高度)的发送部(铅垂发送部)及接收部(铅垂接收部)。由此,能够测定铅垂方向上的上述距离。
(5)在几个实施方式中,在上述(4)的结构的基础上,
所述推力产生机构包括螺旋桨,
所述铅垂发送部以及所述铅垂接收部设置在比所述螺旋桨靠下方的位置。
根据上述(5)的结构,无人航空器是以螺旋桨为推力产生机构的、例如无人机等。另外,测长机构具有用于测定铅垂方向上的与静止物之间的距离(高度)的发送部(铅垂发送部)及接收部(铅垂接收部),并且该铅垂发送部及铅垂接收部以位于比螺旋桨靠下方的位置的方式设置于机体。由此,在位于铅垂方向上的与静止物之间的距离的测定中,能够免受来自螺旋桨的反射波的影响。因此,能够实现铅垂方向上的上述距离的测定精度的提高。
(6)在几个实施方式中,在上述(1)~(5)的结构的基础上,
所述无人航空器还具备位置算出部,所述位置算出部构成为基于所述距离来算出所述无人航空器的位置。
根据上述(6)的结构,无人航空器基于与静止物之间的距离来算出飞行中的位置。这样,通过基于上述距离L求出飞行中的无人航空器的位置,能够精度良好地求出在拍摄机构进行拍摄时的位置。因此,在通过基于图像进行的检查而需要实际的保养作业的情况下,能够迅速地确定与该图像的拍摄位置对应的、应进行保养作业的封闭空间内的位置并接近该位置。另外,能够使无人航空器沿着通过编程等而预先决定的飞行路径自主地飞行。因此,无需人从远程地点操纵无人航空器就能够进行检查作业(沿着飞行路径的飞行、图像的拍摄等),而能够实现检查作业的容易化及高效化。
(7)在几个实施方式中,在上述(1)~(6)的结构的基础上,
所述无人航空器还具备搭载于所述机体的拍摄机构。
根据上述(7)的结构,无人航空器具备相机等拍摄机构。由此,能够得到检查对象的拍摄图像。另外,若与拍摄图像一起得到位置信息,则在根据图像确认出检查对象的破损等不良状况的情况下,能够容易地确定产生不良状况的位置,且能够实现基于检查进行的保养作业的容易化。
(8)在几个实施方式中,在上述(1)~(7)的结构的基础上,
所述静止物是形成所述封闭空间的壁,所述封闭空间是燃烧炉的内部空间。
根据上述(8)的结构,能够利用无人航空器容易地进行由于运转而堆积有燃烧灰等的燃烧炉的炉内的保养检查。例如由于能够不需要脚手架、架设,因此也能够实现用于此的劳力、成本、查点期间的削减。
(9)本发明的至少一实施方式的检查方法是使用了无人航空器的封闭空间内的检查方法,
所述检查方法包括:
飞行步骤,使所述无人航空器在所述封闭空间内飞行;以及
测长步骤,在所述无人航空器的飞行中测定所述无人航空器与存在于所述封闭空间内的静止物之间的距离,
所述测长步骤包括:
发送步骤,发送测定波;
接收步骤,接收所述测定波的反射波;以及
距离算出步骤,基于在所述接收步骤中多次接收的、在所述发送步骤中发送出的所述测定波的所述反射波,来算出与所述静止物之间的距离。
根据上述(9)的结构,起到与上述(1)相同的效果。
(10)在几个实施方式中,在上述(9)的结构的基础上,
所述检查方法还包括基于所述距离来算出所述无人航空器的位置的位置算出步骤。
根据上述(10)的结构,起到与上述(6)相同的效果。
(11)在几个实施方式中,在上述(9)或(10)的结构的基础上,
所述检查方法还包括对存在于所述封闭空间内的检查对象物的至少一个部位进行拍摄的拍摄步骤。
根据上述(11)的结构,起到与上述(7)相同的效果。
发明效果
根据本发明的至少一实施方式,提供即使是在封闭空间内存在煤尘等反射物的情况也能够精度良好地测定与静止物之间的距离的无人航空器。
附图说明
图1是概要示出本发明的一实施方式的无人航空器的图。
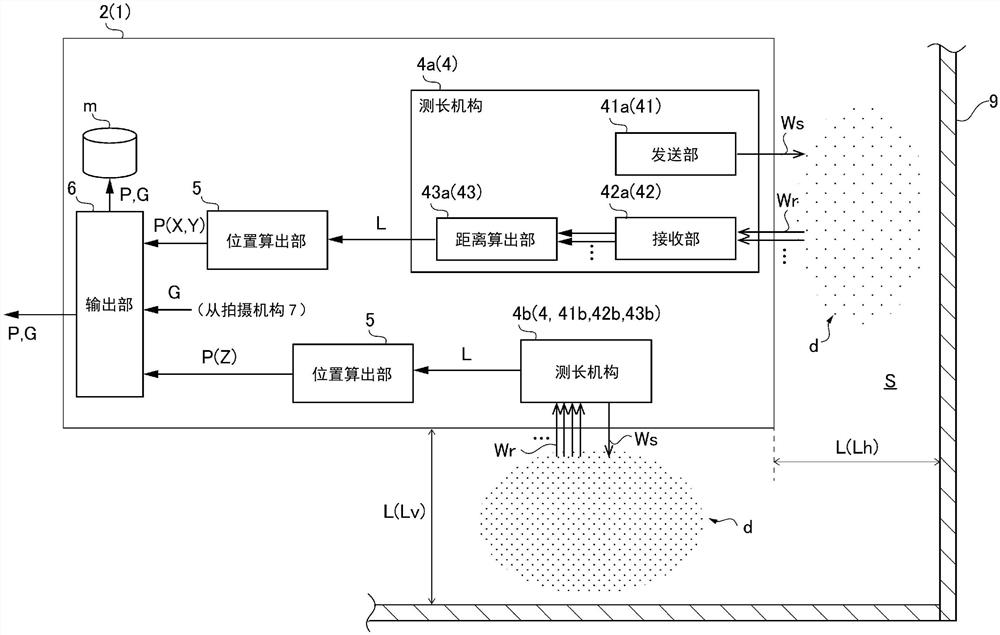
图2是概要示出本发明的一实施方式的测长机构的结构的图。
图3是示出本发明的一实施方式的检查方法的图。
具体实施方式
以下,参照附图对本发明的几个实施方式进行说明。但是,作为实施方式而记载或者附图所示的构成部件的尺寸、材质、形状、其相对的配置等并不意在将本发明的范围限定于此,而只不过是单纯的说明例。
例如,“在某个方向上”、“沿某个方向”、“平行”、“正交”、“中心”、“同心”或者“同轴”等表示相对或绝对的配置的表达不仅表示严格上那样的配置,还表示具有公差或者能够得到相同功能的程度的角度、距离而相对位移了的状态。
例如,“相同”、“等同”以及“均质”等表示事物是等同状态的表达不仅表示严格上等同的状态,还表示存在公差或者能够得到相同功能的程度的差的状态。
例如,表示四边形状、圆筒形状等形状的表达不仅表示在几何学上严格意义下的四边形状、圆筒形状等形状,还表示在能够得到相同效果的范围内包括凹凸部、倒角部等的形状。
另一方面,“具备”、“具有”、“配备”、“包括”或者“有”一个构成要素这样的表达并不是将其他构成要素的存在排除在外的排他性表达。
图1是概要示出本发明的一实施方式的无人航空器1的图。无人航空器1例如是具备螺旋桨的无人机等构成为在封闭空间S内飞行的无人的航空器(UAV:Unmanned AerialVehicle)。上述封闭空间S是在构造物的内部形成的空间。具体而言,例如是锅炉、垃圾焚烧炉等燃烧炉、烟囱等的内部空间,且是堆积有燃烧灰等煤尘d那样的空间。该封闭空间S也可以具有用于使该封闭空间S的一部分与其他空间连通的连通部。例如,水平方向的剖面形状为矩形那样的锅炉(火炉)的内部空间是包括用于使燃料燃烧的燃烧空间的空间,且由以上述剖面呈矩形的方式配置的侧壁部、与该侧壁部的上部相连的顶部以及与侧壁部的下部相连的底部形成,但例如在侧壁部的上部形成有用于与锅炉的烟道连通的连通部。另外,烟囱的内部空间为了形成供废气通过的流路而具有侧壁部,但上部与外部(大气)连通,并且下部与连接于废气处理装置等的配管的内部连通。
并且,如图1所示,上述无人航空器1具备:机体2;推力产生机构3,其构成为产生用于该机体2在空中飞行的推力;以及测长机构4,其搭载(设置)于机体2。并且,无人航空器1也可以具备拍摄机构7等检查信息取得机构。另外,无人航空器1也可以具备位置算出部5。
详细而言,机体2是除无人航空器1的推力产生机构3、以及测长机构4等搭载于机体2的物体以外的部分。在图1所示的实施方式中,机体2具备机体主体21以及以防护机体主体21的周围的方式设置的机体防护部22(前方侧防护部22A、左侧防护部22B、右侧防护部22C、后方侧防护部22D)。另外,推力产生机构3是螺旋桨(旋转叶片),且在机体防护部22的四角的上表面分别设置(合计4个)。需要说明的是,螺旋桨的数量不限定于本实施方式,可以是任意的数量。
另外,在机体2搭载有为了对封闭空间S内进行检查所需的检查信息取得机构(物体),该封闭空间S内是形成封闭空间S的壁等构造物(静止物9)的内壁面等。具体而言,如图1所示,也可以在机体2设置能够对静止图像、构成动态图像的各帧等图像G进行拍摄的拍摄机构7。在图1所示的实施方式中,拍摄机构7包括在上述前方侧防护部22A的一部分设置的第一相机7a以及经由支承部24而设置于后方侧防护部22D的第二相机7b。另外,第一相机7a拍摄静止画面,第二相机7b拍摄动态画面。
并且,通过利用拍摄机构7获取对位于静止物9的内表面侧的配管、接头等拍摄到的图像G,能够基于该图像G来进行静止物9有无损伤这样的外观检查等检查。为了这样的检查而拍摄的图像G也可以存储在搭载于拍摄机构7、机体2的存储介质m中。该存储介质m也可以是以能够装卸的方式搭载于拍摄机构7等的闪存器等。此时,也可以在存储介质m中与图像G一起存储飞行位置P(后述)。或者,也可以通过向设置于构造物外部的计算机(未图示)发送,而向未图示的显示器的画面进行显示或向存储装置(未图示)保存。也可以执行这两者。
但是,本发明不限定于本实施方式。在其他几个实施方式中,机体2也可以不具备防护机体主体21那样的机体防护部22。例如,也可以在如下棒状构件的前端侧设置螺旋桨等推力产生机构3,该棒状构件设置为以具有铅垂方向成为长度方向等任意形状的机体主体21为中心,从机体主体21向多个方向(例如四个方向等)分别延伸。此时,机体主体21也可以具备用于无人航空器1独自站立的腿部。另外,推力产生机构3也可以是进行喷射推进等其他公知的推力产生装置。拍摄机构7也可以具有一台以上的相机,各相机能够对静止画面和动态画面中至少一方进行拍摄即可。
具备如上述那样的结构的无人航空器1的测长机构4如图2所示,具有:发送部41,其构成为发送测定波Ws,该测定波Ws例如是激光、毫米波这样的具有指向性的电磁波等;接收部42,其构成为接收(检测)该测定波Ws的反射波Wr;以及距离算出部43,其构成为基于由接收部42多次接收的、从发送部41发送出的测定波Ws的反射波Wr,来算出与存在于封闭空间S内的静止物9之间的距离L。换言之,上述距离L是与静止物9之间的相对距离。也就是,测长机构4是能够适当地对在成为噪声源的物体的背后存在的监视对象物进行检测的扫描式测距装置的信号处理装置(参照专利文献2)、或者是不根据最初返回的回波(反射波Wr)来算出距离L而是基于多个回波来算出距离L的多回波传感器(参照非专利文献1)。
通过这样的测长机构4,即使在封闭空间S内悬浮有燃烧灰等煤尘d,在测长机构4与静止物9之间存在无数的煤尘d,也能够精度良好地测定与静止物9之间的距离L。即,本发明人们发现,当使无人航空器1在堆积有燃烧灰等煤尘d那样的封闭空间S内飞行时,由于由螺旋桨等推力产生机构3产生的气流,而使封闭空间S成为悬浮有无数的煤尘d的状态。另外发现,在这样的状态下,即使欲使用根据最初返回的反射波Wr算出距离值那样的侧域传感器来测定与静止物9之间的距离L,也无法利用从存在于测长机构4与静止物9之间的无数的煤尘d反射而得到的测定波Ws的反射波Wr来算出距离值,而无法测定出到静止物9的距离L。然而,确认了通过使用上述测长机构4,能够精度良好地将无人航空器1与静止物9之间的距离L测定到实用上没有问题的水平。
根据上述结构,例如无人机等无人航空器1具备测长机构4,该测长机构4基于从发送部41发送出的例如脉冲激光、毫米波等测定波Ws的反射波Wr,来测定与静止物9(内壁面)之间的距离L,该静止物9(内壁面)例如是形成锅炉等燃烧炉、烟囱等的壁面等。该测长机构4能够基于针对发送出的测定波Ws(脉冲)接收的多个反射波Wr,来测定与静止物9之间的距离L。这样,通过基于多个反射波Wr来测定与静止物9之间的距离L,即使是在测长机构4(接收部42)与静止物9之间存在燃烧灰等煤尘d的情况,也能够精度良好地测定与静止物9之间的距离L,也能够实现由无人航空器进行的封闭空间内的检查。
另外,如后述那样,若基于由测长机构4测定出的距离L来求出无人航空器1在封闭空间S内的位置,则能够精度良好地算出该位置,因此能够精度良好地求出检查位置、能够使无人航空器1沿着通过预先决定等而得到的飞行路径自主地飞行。因此,也能够使由无人航空器1进行的封闭空间S内的检查高效化。
在几个实施方式中,上述测长机构4基于上述那样的多次接收的反射波Wr,测定至少水平方向(例如,沿着水平面而设定的相互正交的X方向及Y方向)上的到静止物9的距离L即可。即,在几个实施方式中,如图1~图2所示,测长机构4也可以构成为分别测定分别位于水平方向及铅垂方向(与X方向及Y方向正交的方向即Z方向)上的、到静止物9的距离L(Lh、Lv)。
在图1~图2所示的实施方式中,如图1~图2所示,测长机构4具备:水平测长机构4a,其用于测定位于水平方向上的与静止物9之间的距离Lh;以及铅垂测长机构4b,其用于测定位于铅垂方向上的与静止物9之间的距离Lv。
水平测长机构4a至少具有:水平发送部41a,其构成为在水平方向上发送测定波Ws;以及水平接收部42a,其构成为接收从水平发送部41a发送出的测定波Ws的反射波Wr。
另一方面,铅垂测长机构4b具有:铅垂发送部41b,其构成为向铅垂方向的下方发送测定波Ws;以及铅垂接收部42b,其构成为接收从铅垂发送部41b发送出的测定波Ws的反射波Wr。
需要说明的是,为了水平测长机构4a对水平方向上的两个方向(X方向、Y方向)进行长度测量,水平发送部41a和水平接收部42a也可以构成为一起旋转等。或者,水平测长机构4a也可以具有用于对水平方向上的两个方向分别进行测定的水平发送部41a及水平接收部42a。另外,在图2中,水平测长机构4a与铅垂测长机构4b虽然测长方向不同但结构相同,因此在图2中省略了铅垂测长机构4b的详细说明。
如图2所示,上述水平测长机构4a也可以还具备水平距离算出部43a,该水平距离算出部43a构成为基于由水平接收部42a多次接收的、从水平发送部41a发送出的测定波Ws的反射波Wr,来算出与存在于封闭空间S内的静止物9之间的距离Lh。另外,铅垂测长机构4b也可以还具备铅垂距离算出部43b,该铅垂距离算出部43b构成为基于由铅垂接收部42b多次接收的、从铅垂发送部41b发送出的测定波Ws的反射波Wr,来算出与存在于封闭空间S内的静止物9之间的距离Lv。或者,测长机构4所具备的距离算出部43也可以构成为分别与水平距离算出部43a及铅垂距离算出部43b连接,并算出水平方向及铅垂方向这两个方向上的距离L(Lh、Lv)。
另外,在图1所示的实施方式中,水平测长机构4a设置在比螺旋桨(推力产生机构3)靠上方的位置。另外,铅垂测长机构4b设置在比螺旋桨靠下方的位置。
本发明人们发现,由于螺旋桨的旋转而悬浮的煤尘d主要悬浮在螺旋桨的下方。因此,通过使测定水平方向上的与静止物9之间的距离L(Lh)的测长机构4位于螺旋桨的上方,能够在悬浮于与静止物9之间的煤尘d较少的环境下,测定位于水平方向上的与静止物9之间的距离L。因此,能够实现水平方向上的上述距离L(Lh)的测定精度的提高。
另外,通过将铅垂发送部41b及铅垂接收部42b以位于比螺旋桨靠下方的位置的方式设置于机体2,能够在位于铅垂方向上的与静止物9之间的距离L(Lv)的测定中,免受来自螺旋桨的反射波Wr的影响。因此,能够实现铅垂方向上的上述距离L(Lv)的测定精度的提高。
在其他几个实施方式中,也可以构成为,测长机构4仅测定位于水平方向上的与静止物9之间的距离Lh,对于位于铅垂方向上的与静止物9之间的距离Lv,例如利用气压计等其他机构来测定。
根据上述结构,由测长机构4来测定存在于至少水平方向上的与静止物9之间的距离L。由此,可以提供能够以无人的方式检查封闭空间S的无人航空器1。
另外,在几个实施方式中,如图2所示,无人航空器1也可以还具备位置算出部5,该位置算出部5基于由测长机构4测定出的到静止物9的距离L,来算出无人航空器1在进行距离L的测定时的位置(以下,飞行位置P)。由此,无人航空器1能够得到飞行中的飞行位置P。需要说明的是,本发明人们确认了能够将这样算出的飞行位置P精度良好地求出到在检查方面或者实现自主飞行(后述)的方面没有问题的水平。
在图2所示的实施方式中,无人航空器1还具备输出部6,该输出部6以将由位置算出部5算出的拍摄机构7进行拍摄时的飞行位置P与由拍摄机构7拍摄到的图像G建立关联的方式,向设置于构造物的外部的上述计算机(未图示)、存储介质m等进行输出。该输出部6通过与上述位置算出部5连接,而求出由X方向、Y方向、Z方向的位置确定的封闭空间S内的三维位置。需要说明的是,输出部6向存储介质m和上述计算机(未图示)中的至少一方进行输出即可。
根据上述结构,无人航空器1基于与静止物9之间的距离L来算出飞行中的位置。这样,通过基于上述距离L求出飞行中的无人航空器1的位置,能够精度良好地求出在拍摄机构7进行拍摄时的位置。因此,在通过基于图像G进行的检查而需要实际的保养作业的情况下,能够迅速地确定与该图像G的拍摄位置对应的、应进行保养作业的封闭空间S内的位置并接近该位置。另外,能够使无人航空器1沿着通过编程等而预先决定的飞行路径自主地飞行。因此,无需人从远程地点操纵无人航空器1就能够进行检查作业(沿着飞行路径的飞行、图像的拍摄等),而能够实现检查作业的容易化及高效化。需要说明的是,无人航空器1也可以由人一边从构造物的外部观察显示于画面的图像G(动态画面等)一边通过手动远程操纵。
以下,使用图3说明使用上述无人航空器1进行的检查方法。图3是示出本发明的一实施方式的检查方法的图。
该检查方法是使用无人航空器1进行的封闭空间S内的检查方法。如图3所示,检查方法包括:飞行步骤(S1),使无人航空器1在封闭空间S内飞行;以及测长步骤(S3),在无人航空器1的飞行中,测定无人航空器1与存在于封闭空间S内的上述静止物9之间的距离L。另外,上述测长步骤(S3)具有:发送步骤(S31),发送上述测定波Ws;接收步骤(S32),接收测定波Ws的反射波Wr;以及距离算出步骤(S33),基于在上述接收步骤(S31)中多次接收的、在上述发送步骤(S32)中发送出的测定波Ws的反射波Wr,来算出与静止物9之间的距离L。
上述的测长步骤(S3)以及该测长步骤(S3)所具有的发送步骤、接收步骤、距离算出步骤分别与已经说明的测长机构4、发送部41、接收部42、距离算出部43所执行的处理内容相同,因此省略详细说明。另外,飞行步骤(S1)通过使用已经说明的推力产生机构3使机体2飞行来执行。
在图3所示的实施方式中,在步骤S1中执行飞行步骤。例如也可以在预先决定的飞行路径飞行。在步骤S2中,确认在沿着飞行路径飞行时,是否到达了在飞行路径上确定的至少一处停止位置。然后,在到达了停止位置的情况下,在使无人航空器1在空中停止的状态下执行测长步骤(S3)。即,当在步骤S2中到达了停止位置的情况下,在步骤S3中,在无人航空器1在空中停止的状态下执行测长步骤(S3)。具体而言,在步骤S3中执行上述的发送步骤(S31)、接收步骤(S32)以及距离算出步骤(S33)。这样,在测长步骤(S3)中,通过基于多个反射波Wr来测定与静止物9之间的距离L,即使在存在煤尘d的情况下,也能够分别精度良好地测定水平方向的两个方向(X方向、Y方向)、铅垂方向(Z方向)上的距离L等。
在几个实施方式中,如图3所示,检查方法也可以还具备基于上述距离L来算出无人航空器1的位置(飞行位置P)的位置算出步骤(S4)。由于位置算出步骤(S4)与已经说明的位置算出部5所执行的处理内容相同,因此省略详细说明。在图3所示的实施方式中,在步骤S4中执行位置算出步骤。此时,存储通过执行位置算出步骤(S4)而算出的飞行位置P。
另外,在几个实施方式中,如图3所示,检查方法也可以还具备对存在于封闭空间S内的检查对象物的至少一个部位进行拍摄的拍摄步骤(S5)。检查对象物例如是上述静止物9(内壁面)等。拍摄步骤(S5)通过使用已经说明的无人航空器1所具备的拍摄机构7来进行。在图3所示的实施方式中,在步骤S5中执行拍摄步骤。此时,存储通过执行拍摄步骤(S5)而拍摄到的图像G。
另外,在图3所示的实施方式中具备输出步骤(S6),该输出步骤(S6)在步骤S5的执行后,以将通过执行位置算出步骤(S4)而得到的飞行位置P与通过执行拍摄步骤(S5)而得到的图像G建立关联的方式进行输出。该输出步骤(S6)在几个实施方式中,也可以向上述存储介质m进行输出,并将图像G与飞行位置P建立关联而存储。在其他几个实施方式中,输出步骤(S6)也可以通过无线通信等通信向封闭空间S外的计算机等进行输出。在该情况下,也可以将飞行位置P和图像G同时输出在同一画面上。也可以进行上述实施方式这两方。
之后,在步骤S7中,确认是否到达了在飞行路径上设定的全部的停止位置。然后,当未在全部的停止位置停止过的情况下,在步骤S8中,再次开始基于飞行的移动,并返回即将进行步骤S2之前(S1与S2之间)。另一方面,当在全部的停止位置停止过的情况下,停止飞行(着陆)等。之后,在步骤S9中,基于图像G来检查(check)检查对象物的破损等的有无。此时,在存在确认有破损等的图像G的情况下,由于飞行位置P与该图像G建立了关联,因此能够基于拍摄到图像G的飞行位置P,来确定封闭空间S内的实际位置,而能够进行保养作业。
需要说明的是,在图3所示的实施方式中,在位置算出步骤(S4)执行后执行拍摄步骤(S5),但该顺序也可以相反。另外,也可以在飞行中(在步骤S7中成为“是”之前)并行地进行步骤S9。
本发明不限定于上述实施方式,还包括对上述实施方式施加变形而得到的方式、将这些方式适当组合而得到的方式。
附图标记说明:
1 无人航空器
2 机体
21 机体主体
22 机体防护部
22A 前方侧防护部
22B 左侧防护部
22C 右侧防护部
22D 后方侧防护部
24 支承部
3 推力产生机构
4 测长机构
4a 水平测长机构
4b 铅垂测长机构
41 发送部
41a 水平发送部
41b 铅垂发送部
42 接收部
42a 水平接收部
42b 铅垂接收部
43 距离算出部
43a 水平距离算出部
43b 铅垂距离算出部
5 位置算出部
6 输出部
7 拍摄机构
7a 第一相机
7b 第二相机
9 静止物
S 封闭空间
L 距离
Lh 水平方向的距离
Lv 铅垂方向的距离
Ws 测定波
Wr 反射波
P 飞行位置
m 存储介质
d 煤尘。
- 无人航空器及检查方法
- 无人航空器控制系统、无人航空器控制方法、及程序