生物信号检测装置以及生物信号检测方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明有关于一种检测装置以及检测方法,特别是有关于一种生物信号检测装置以及生物信号检测方法。
背景技术
现在信号处理技术可以根据一待测者的生物医学信号(biomedical signal)提取有关于此待测者的身体信息。在现有的生物医学信号中,脉搏(pulse)是中医学(traditional Chinese medicine,TCM)中医生用以了解疾病情况的主要信号之一。
现在更有脉诊仪可以纪录中医所需的脉波图形,以利后续的分析。然而,现有的脉诊仪无法提供一般使用者准确的对位方法,无法让用户针对正确的位置施压,降低整体的检测分辨率以及准确度。现有的脉诊仪的对位方法也无法同时供使用者的左右手使用。基于上述理由,人们仍需要具有更佳对位方法以及分辨率的检测装置。
发明内容
本发明提供一种生物信号检测装置以及生物信号检测方法,其可以准确自用户量测生物信号。
本发明一实施例的生物信号检测装置包括支撑架、第一承载元件以及感测模块。支撑架包括底座、第一调整臂以及第二调整臂。第一调整臂连接底座以及第二调整臂。第一承载元件配置于支撑架的底座。第一承载元件包括第一凹槽以及第二凹槽,且第二凹槽配置于第一凹槽旁。第二调整臂连接感测模块至第一调整臂。感测模块包括第二承载元件以及压力感测元件。压力感测元件配置于第二承载元件。压力感测元件朝向第一凹槽或第二凹槽。第一调整臂沿着第三方向延伸。第二调整臂沿着第二方向延伸。第一凹槽以及第二凹槽沿着第一方向延伸。第一方向、第二方向和第三方向彼此垂直。
在本发明的一实施例中,在第一方向上,上述的压力感测元件和第一承载元件的边缘之间的最短距离不超过10毫米。
在本发明的一实施例中,上述的第一承载元件在第二方向上的宽度落在90毫米至160毫米的范围。
在本发明的一实施例中,在第二方向上,上述的压力感测元件和第二承载元件的边缘之间的最短距离不超过8毫米。
在本发明的一实施例中,上述的压力感测元件包括第一压力感测单元、第二压力感测单元、第三压力感测单元、第一气囊、第二气囊以及第三气囊。第一气囊配置于第一压力感测单元。第二气囊配置于第二压力感测单元。第三气囊配置于第三压力感测单元。第一压力感测单元、第二压力感测单元以及第三压力感测单元沿着第一方向排列。
在本发明的一实施例中,上述的第一气囊、第二气囊以及第三气囊的大小彼此不同。
在本发明的一实施例中,上述的第一气囊、第二气囊以及第三气囊中的气压彼此不同。
在本发明的一实施例中,上述的第一气囊、第二气囊和第三气囊中的气压落在80毫米汞柱至155毫米汞柱的范围。
在本发明的一实施例中,上述的第一凹槽和第二凹槽之间具有分隔脊。第一凹槽远离分隔脊的一侧具有第一深度,第一凹槽邻近分隔脊的一侧具有第二深度,第一深度大于第二深度。第二凹槽远离分隔脊的一侧具有第三深度,第二凹槽邻近分隔脊的一侧具有第四深度,第三深度大于第四深度。
在本发明的一实施例中,上述的第一凹槽在第一方向上的末端具有第一对位端,且上述的第二凹槽在第一方向上的末端具有第二对位端。第一对位端和第二对位端沿着第二方向排列。
本发明一实施例的生物信号检测方法用以对一用户撷取生物信号。此生物信号检测方法包括:提供一生物信号检测装置;放置用户的手腕于生物信号检测装置的第一承载元件,并以第一承载元件决定手腕于第一方向上的位置;调整感测模块在第二方向上的位置;调整感测模块在第三方向上的位置,并使感测模块接触手腕以及以感测模块读取生物信号。
在本发明的一实施例中,上述以第一承载元件决定手腕于第一方向上的位置的步骤包括:将第一承载元件的边缘对齐手腕邻近手掌的第一腕横纹。
在本发明的一实施例中,上述以支撑架调整感测模块在第二方向的位置的步骤包括:将感测模块的第二承载元件的边缘对齐手腕的桡侧腕屈肌肌腱外侧,使感测模块位于手腕之寸口上方。
在本发明的一实施例中,上述以支撑架调整感测模块在第三方向的位置的步骤包括:自感测模块的压力感测元件撷取压力数值;以及当压力数值自一初始压力值到达一目标压力值时,决定感测模块在第三方向上的位置。
在本发明的一实施例中,上述的初始压力值落在80至110毫米汞柱的范围,且目标压力值落在120至155毫米汞柱的范围。
在本发明的一实施例中,上述的目标压力值和初始压力值之间的差值落在5毫米汞柱至40毫米汞柱的范围。
在本发明的一实施例中,在上述的支撑架调整感测模块在第二方向上的位置的步骤中,感测模块和第一承载元件的边缘在第一方向上的最短距离不超过10毫米。
由上述可知,本发明实施例的生物信号装置以及生物信号检测方法可以借由第一承载元件固定用户的手腕,使感测模块可以在适当的位置侦测生物信号。
以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
图1是本发明一实施例中生物信号检测装置的立体示意图;
图2至图4是本发明一实施例中生物信号检测装置于不同操作状态的俯视示意图;
图5是本发明一实施例中第一承载元件的立体示意图;以及
图6及图7是本发明一实施例中生物信号检测装置于不同操作阶段的侧面示意图。
其中,附图标记:
P:水平面
d1:第一方向
d2:第二方向
d3:第三方向
g1:最短距离
g2:最短距离
g3:最短距离
h1:第一深度
h2:第二深度
h3:第三深度
h4:第四深度
w1:宽度
w2:宽度
w3:宽度
w4:宽度
50:手腕
51:第一腕横纹
52:手掌
53:手腕
54:第一腕横纹
55:手掌
56:桡侧腕屈肌肌腱
57:桡侧腕屈肌肌腱
100:生物信号检测装置
110:第一承载元件
111:第一凹槽
112:第二凹槽
113:边缘
114:分隔脊
115:第一对位端
116:第二对位端
120:支撑架
121:底座
122:第一调整臂
123:第二调整臂
130:感测模块
131:第二承载元件
131S1:边缘
131S2:边缘
132:压力感测元件
132S1:边缘
133:第一压力感测单元
134:第二压力感测单元
135:第三压力感测单元
136:第一气囊
137:第二气囊
138:第三气囊
具体实施方式
本发明提出的生物信号检测装置以及生物信号检测方法可以应用在脉诊仪或其他用以侦测人体的生物信号的设备,上述的生物信号例如是脉搏,本发明不限于此。
应当理解,尽管术语「第一」、「第二」、「第三」等在本文中可以用于描述各种元件、部件、区域、层或部分,但是这些元件、部件、区域、层或部分不应受这些术语的限制。这些术语仅用于将一个元件、部件、区域、层或部分与另一个元件、部件、区域、层或部分区分开。因此,下面讨论的「第一元件」、「部件」、「区域」、「层」或「部分」可以被称为第二元件、部件、区域、层或部分而不脱离本文的教导。
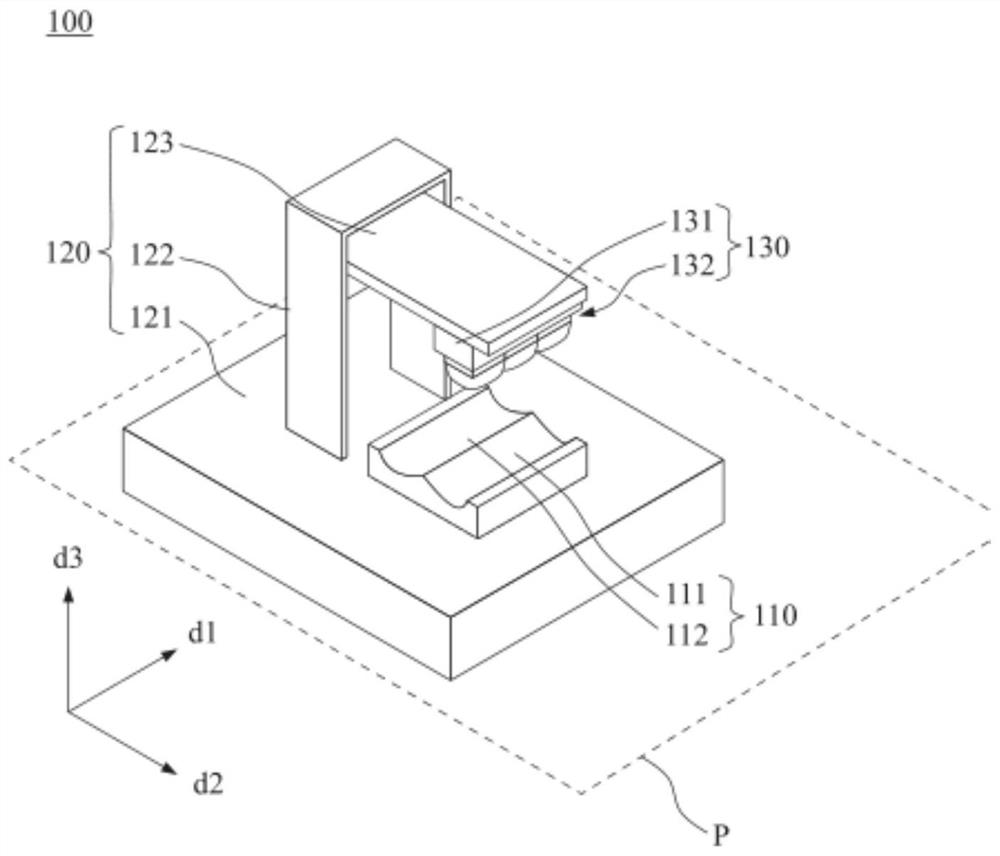
图1是本发明一实施例中生物信号检测装置的立体示意图。请参照图1,在本实施例中,生物信号检测装置100包括第一承载元件110、支撑架120以及感测模块130。支撑架120连接感测模块130,且第一承载元件110配置于支撑架120上。换句话说,支撑架120连接感测模块130以及第一承载元件110。
具体而言,支撑架120包括底座121、第一调整臂122以及第二调整臂123。底座121适于配置于桌面或地面等坚固的水平面上,本发明不限于此。第一调整臂122连接底座121以及第二调整臂123。第一调整臂122沿着第三方向d3延伸,且第二调整臂123沿着第二方向d2延伸。第一调整臂122可以沿着第三方向d3调整第二调整臂123的高度。
第一承载元件110配置于支撑架120的底座121。第一承载元件110包括第一凹槽111以及第二凹槽112,且第一凹槽111配置于第二凹槽112旁。第一凹槽111和第二凹槽112都沿着第一方向d1延伸,使使用者的手腕可以沿着第一方向d1放置。
具体而言,在本实施例中,当支撑架120的底座121放置在一水平面P上时,第三方向d3实质上垂直于水平面。第一方向d1和第二方向d2都垂直于第三方向d3,因此沿着第一方向d1延伸的第一凹槽111和第二凹槽112都可以让使用者的手腕沿着第一方向d1水平放置。
第二调整臂123沿着第二方向d2连接感测模块130,且第一方向d1垂直于第二方向d2。因此,感测模块130可以借由第二调整臂123移动至对应到第一凹槽111的位置或对应到第二凹槽112的位置。换句话说,第二调整臂123可以沿着第二方向d2调整感测模块130,使感测模块130可以跨过第一凹槽111和第二凹槽112上方移动。
第一调整臂122沿着第三方向d3连接底座121以及第二调整臂123,因此第一调整臂122可以调整并决定第一承载元件110和感测模块130之间的距离。当用户的手腕放在第一承载元件110时,第一调整臂122可以调整感测模块130的位置使感测模块130可以手腕。
感测模块130包括第二承载元件131以及压力感测元件132。第二承载元件131连接第二调整臂123,且压力感测元件132配置于第二承载元件131。压力感测元件132朝向第一凹槽111和第二凹槽112,第二承载元件131位于第二调整臂123和压力感测元件132之间。
因此,第二调整臂123可以沿着第二方向d2调整压力感测元件132,使压力感测元件132可以朝向第一凹槽111或第二凹槽112。第一调整臂122可以让压力感测元件132沿着第三方向d3调整其与和第一承载元件110之间的距离,使压力感测元件132朝第一凹槽111或第二凹槽112移动。
举例而言,本实施例中用以对用户撷取生物信号的生物信号检测方法包括:提供上述的生物信号检测装置100;放置用户的手腕于生物信号检测装置100的第一承载元件110,并以第一承载元件110决定手腕于第一方向d1上的位置。换句话说,使用者可以借由手腕上的横纹对齐第一承载元件110上的元件以决定手腕于第一方向d1上的位置。
接着,本实施例的生物信号检测方法以支撑架120调整感测模块130在第二方向d2上的位置。举例而言,本实施例支撑架120的第二调整臂123将感测模块130移动至实质上朝向部分第一凹槽111的位置。
在决定感测模块130在第二方向d2上的位置后,支撑架120的第一调整臂122调整感测模块130在第三方向d3上的位置,并使感测模块130接触手腕。
接着,生物信号检测装置100可以借由感测模块130读取生物信号。具体而言,感测模块130的压力感测元件132适于在接触用户的手腕时测量脉搏信号,进而传递至一电性连接至感测模块130的处理单元(未绘示于图1)并记录。进一步而言,支撑架120亦可以电性连接至处理单元,进而借由处理单元控制支撑架120的第一调整臂122和第二调整臂123。
因此,本实施例的生物信号检测装置100的第一承载元件110调整并固定手腕,且手腕可以对准第一承载元件110的边缘。生物信号检测装置100的第二调整臂123可以移动感测模块130到对应至手腕所放置的第一凹槽111或第二凹槽112的位置,再借由第一调整臂122移动感测模块130至可以接触手腕的位置。因此,本实施例的生物信号检测装置100以及生物信号检测方法可以让用户准确量测生物信号。
图2是本发明上述实施例中生物信号检测装置100的俯视示意图,其中被第二调整臂123遮蔽的压力感测元件132以虚线绘制。请参照图2,在第一方向d1上,压力感测元件132和第一承载元件110之间的最短距离g1不超过20毫米。详细而言,在第一方向d1上,压力感测元件132和第一承载元件110之间的最短距离g1落在1毫米至20毫米的范围。
具体而言,第一承载元件110具有边缘113。在第一方向d1上,第一承载元件110的边缘113和感测模块130之间的最短距离g1落在1毫米至20毫米的范围。举例而言,第一承载元件110的边缘113为第一承载元件110接近手掌一侧的边缘,压力感测元件132亦具有接近于接近手掌一侧的边缘132S1,第一承载元件110的边缘113与压力感测元件132的边缘132S1之间的最短距离g1落在1毫米至20毫米的范围。
图3以及图4是本发明上述实施例中生物信号检测装置100于不同操作状态的俯视示意图,其中第二调整臂123和压力感测元件132都以虚线绘制,且图3是使用者的手腕放置在第一凹槽111的俯视示意图,图4是使用者的另一手腕放置在第二凹槽112的俯视示意图。举例而言,请一并参照图2至图4,在本实施例中,因为压力感测元件132的位置与第一承载元件110的边缘113的位置在第一方向d1上相近,因此当使用者的手腕50放置于第二凹槽112时,第一承载元件110的边缘113可以对齐手腕50邻近手掌52的第一腕横纹51,使手腕50的寸口位于压力感测元件132的移动范围中。此处所指的第一腕横纹51为使用者手腕朝上时以肉眼所能观察到的腕横纹中最接近手掌的那条腕横纹。
当使用者的另一手腕53放置于第一凹槽111时,第一承载元件110的边缘113可以对齐手腕53邻近手掌55的第一腕横纹54,使手腕53的寸口位于压力感测元件132的移动范围中。
换句话说,在本实施例的生物信号检测方法中,以第一承载元件110决定手腕50于第一方向d1上的位置的步骤包括:将第一承载元件110的边缘113对齐手腕50邻近手掌52的第一腕横纹51。因此使用者的手腕50可以借由上述步骤将寸口的位置放置在适于供感测模块130量测的位置。
另一方面,以第一承载元件110决定另一手腕53于第一方向d1上的位置的步骤包括:将第一承载元件110的边缘113对齐手腕53邻近手掌55的第一腕横纹54。因此使用者的手腕53可以借由上述步骤将寸口的位置放置在适于供感测模块130量测的位置。
具体而言,手腕50是使用者的左手手腕,且放置于第二凹槽112时手掌52的掌面朝上。手腕53是使用者的右手手腕,且放置在第一凹槽111时手掌55的掌面朝上。
另一方面,本实施例的生物信号检测方法中,以支撑架120调整感测模块130在第二方向d2的位置的步骤包括将感测模块130的第二承载元件131的边缘对齐手腕50的桡侧腕屈肌肌腱56外侧或手腕53的桡侧腕屈肌肌腱57外侧,使感测模块130位于手腕50或手腕53之寸口上方,以利感测模块130量测手腕50或手腕53的生物信号。
详细而言,请参照图4,在第二方向d2上本实施例的压力感测元件132和第二承载元件131的边缘131S1之间的最短距离g2不超过8毫米。举例而言,本实施例的最短距离g2落在0毫米至20毫米的范围,但本发明不限于此。
在本实施例中,第一承载元件110在第二方向d2上的宽度w1落在90毫米至160毫米的范围,因此具有足够的空间配置第一凹槽111和第二凹槽112。
图5是本发明一实施例中第一承载元件110的立体示意图。请参照图5,第一承载元件110在第一方向d1上的宽度w2落在40毫米至80毫米的范围,因此第一承载元件110可以适当地承载上述的手腕50(请参照图3)或手腕53(请参照图4)。
详细而言,本实施例的第一承载元件110的第一凹槽111在第二方向d2上的宽度w3落在15毫米至60毫米的范围,因此适于承载使用者的手腕53(请参照图4)。举例而言,第一凹槽111可以承载使用者的右手腕。第二凹槽112在第二方向d2上的宽度w4落在15毫米至60毫米的范围,因此适于承载使用者的手腕50(请参照图3)。举例而言,第二凹槽112可以承载使用者的左手腕。
另一方面,第一凹槽111和第二凹槽112之间具有分隔脊114。第一凹槽111远离分隔脊114的一侧具有第一深度h1,第一凹槽111邻近分隔脊114的一侧具有第二深度h2,并且第一深度h1大于第二深度h2。第二凹槽112远离分隔脊114的一侧具有第三深度h3,第二凹槽112邻近分隔脊114的一侧具有第四深度h4,并且第三深度h3大于第四深度h4。具体而言,本实施例的第一凹槽111的最大深度h1落在5毫米至30毫米的范围,第二凹槽112的最大深度h3落在5毫米至45毫米的范围。因此,手腕50(请参照图3)放在第二凹槽112时可以让手腕50的寸口朝上,以利量测。手腕53(请参照图4)放在第一凹槽111时可以让手腕53的寸口朝上,以利量测。
本实施例的第一凹槽111在第一方向d1上的末端具有第一对位端115,且第二凹槽112在第一方向d1上的末端具有第二对位端116。第一对位端115和第二对位端116沿着第二方向d2排列,因此第一凹槽111的第一对位端115可以让手腕53对齐,第二凹槽112的第二对位端116可以让手腕50对齐。
图6以及图7是本发明一实施例中生物信号检测装置于不同操作阶段的侧面示意图,其中图6是在第三方向d3调整感测模块130的位置前的侧面示意图,图7是在第三方向d3调整感测模块130的位置后的侧面示意图。
请参照图6,在本实施例中,压力感测元件132和第二承载元件131的边缘131S2之间在第一方向d1上的最短距离g3不超过20毫米。举例而言,本实施例的最短距离g3落在1毫米至20毫米的范围,因此感测模块130可以量测手腕50寸口的生物信号。
具体而言,压力感测元件132包括第一压力感测单元133、第一气囊136、第二压力感测单元134、第二气囊137、第三压力感测单元135以及第三气囊138。第一气囊136配置于第一压力感测单元133,且第一压力感测单元133位于第二承载元件131和第一气囊136之间。第二气囊137配置于第二压力感测单元134,且第二压力感测单元134位于第二承载元件131和第二气囊137之间。第三气囊138配置于第三压力感测单元135,且第三压力感测单元135位于第二承载元件131和第三气囊138之间。
第一压力感测单元133、第二压力感测单元134以及第三压力感测单元135沿着第一方向d1排列,因此第一气囊136、第二气囊137以及第三气囊138也沿着第一方向d1排列。因此,当压力感测元件132对应至手腕50的寸口位置时,第一气囊136、第二气囊137以及第三气囊138可以各自对应到手腕50的尺、关、寸的位置。
进一步而言,在本实施例中,当压力感测元件132尚未接触手腕50时,第一气囊136、第二气囊137以及第三气囊138中的气压能够彼此相同或彼此不同。因此,第三气囊138、第二气囊137以及第一气囊136可以各自量测寸、关、尺的生物信号,且此生物信号例如是脉搏信号。
举例而言,第一气囊136、第二气囊137以及第三气囊138中的气压落在80毫米汞柱至155毫米汞柱的范围。
在本实施例的生物信号检测方法中,以支撑架120调整感测模块130在第三方向d3的位置的步骤包括:自感测模块130的压力感测元件132撷取压力数值。接着,当压力数值自一初始压力值到达一目标压力值时,决定感测模块130在第三方向d3上的位置。
换句话说,当感测模块130尚未接触第一承载元件110上的手腕50时,第一气囊136、第二气囊137以及第三气囊138中的气压为初始压力值,且此初始压力值落在80毫米汞柱至110毫米汞柱的范围。
请参照图7,当感测模块130接触手腕50且压力感测元件132所撷取的压力数值到达一目标压力值时,支撑架120可以停止调整第三方向d3上的位置。举例而言,目标压力值落在120至155毫米汞柱的范围。
在本实施例中,目标压力值和初始压力值之间的差值落在5毫米汞柱至40毫米汞柱的范围,因此感测模块130可以适当地接触手腕50以撷取生物信号。
举例而言,第一压力感测单元133、第二压力感测单元134以及第三压力感测单元135可以包含压电传感器、压阻传感器或电容传感器等可挠式压感传感器,本发明并不限于此。
综上所述,本发明实施例的生物信号检测装置以及生物信号检测方法可以利用支撑架让感测模块对准第一承载元件上的位置,因此当用户放置手腕于第一承载元件上时,生物信号检测装置可以精准量测生物信号。
当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明权利要求的保护范围。
- 生物信号检测装置以及生物信号检测方法
- 生物信号检测电极及配备其的生物信号检测装置