行动检测系统、接口装置和机器人
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及行动检测系统、接口装置和机器人。
背景技术
计算机为了得知人或物的位置,大多情况下使用对实物空间进行模拟的电子地图信息。而且,自走的机器人生成地图信息的技术正在普及。专利文献1的机器人在沿着自身的移动路径生成地图信息时,取得区域的特性。关于区域的特性,例如测定位于上部的障碍物与地面的距离、地面材质、灰尘污染度。专利文献2的地图生成装置,将在某一地点取得的周边的几何形状、与在另一地点取得的周边的几何形状合成而生成地图信息。专利文献2的地图生成装置在该合成时,使用2点间的距离、跨2点检测到的壁面的平行移动量等。
现有技术文献
专利文献
专利文献1:日本特开2007-323652号公报
专利文献2:日本特开2010-54315号公报
发明内容
发明要解决的课题
特别是在室内,在机器人这样的移动机器之外,大多也配置检测人或物的传感器。而且,有时需要以传感器和机器人共存为前提,由传感器和机器人分担地图信息的生成、人或物的检测、对人或物的干涉等。例如,对处于室内的老年人进行看护或援助的情况下,其必要性特别增加。专利文献1并没有提及机器人以外的传感器和对人等的看护或干涉。专利文献2也没有提及机器人以外的传感器和对人等的看护或干涉。
于是,本发明的目的在于在配置了传感器的环境中、由机器人准确地对人等进行干涉。
用于解决课题的技术方案
行动检测系统特征在于,包括:设置在室内的任意处的多个传感器装置,其具有检测信息的第一传感器和发送信息的第一通信单元;机器人,其具有检测信息的第二传感器、收发信息的第二通信单元和能够在室内移动的移动单元;服务器,其具有收发信息的第三通信单元,基于多个传感器装置所具有的第一传感器的检测信息和机器人所具有的第二传感器的检测信息,来检测移动体的行动;和接口装置,其接受用户在屏幕上输入多个传感器装置的设置位置。
关于其他技术方案,在具体实施方式中进行说明。
发明的效果
根据本发明,在配置了传感器的环境中,机器人能够准确地对人等进行干涉。
附图说明
图1是表示第一实施方式中的行动检测系统的结构的概略图。
图2是表示第一实施方式的行动检测系统设置在的居住房间的图。
图3是表示传感器设置信息(SI)的一例的图。
图4是表示事件信息(EI)的一例的图。
图5是表示传感器设置信息(SI)模式时的居住房间的图。
图6是表示传感器信息(GI)的图。
图7是表示传感器信息生成模式的处理的流程图。
图8是表示第一实施方式中的传感器设置信息模式的处理的流程图。
图9是表示事件信息模式下的居住房间的图。
图10是表示事件信息模式下的传感器信息(GI)的图。
图11是表示事件信息模式的处理的流程图。
图12是仅提取出事件信息的图。
图13是表示事件信息模式中的移动机器人尚未起动时的处理的流程图。
图14是表示事件信息模式中的移动机器人已起动时的处理的流程图。
图15是表示异常检测时的居住房间的图。
图16是提取出事件信息的缺失的图。
图17是表示异常检测模式的处理的流程图。
图18是表示第二实施方式中的行动检测系统的结构的概略图。
图19是表示第三实施方式中的行动检测系统的结构的概略图。
图20是接口屏幕的一例。
图21是表示第三实施方式中的传感器设置信息模式的处理的流程图。
图22是说明人的移动的图。
图23是说明异常发生时的人和机器人的移动的图。
具体实施方式
《第一实施方式》
对于第一实施方式的行动检测系统S,使用图1~图18在以下进行说明。
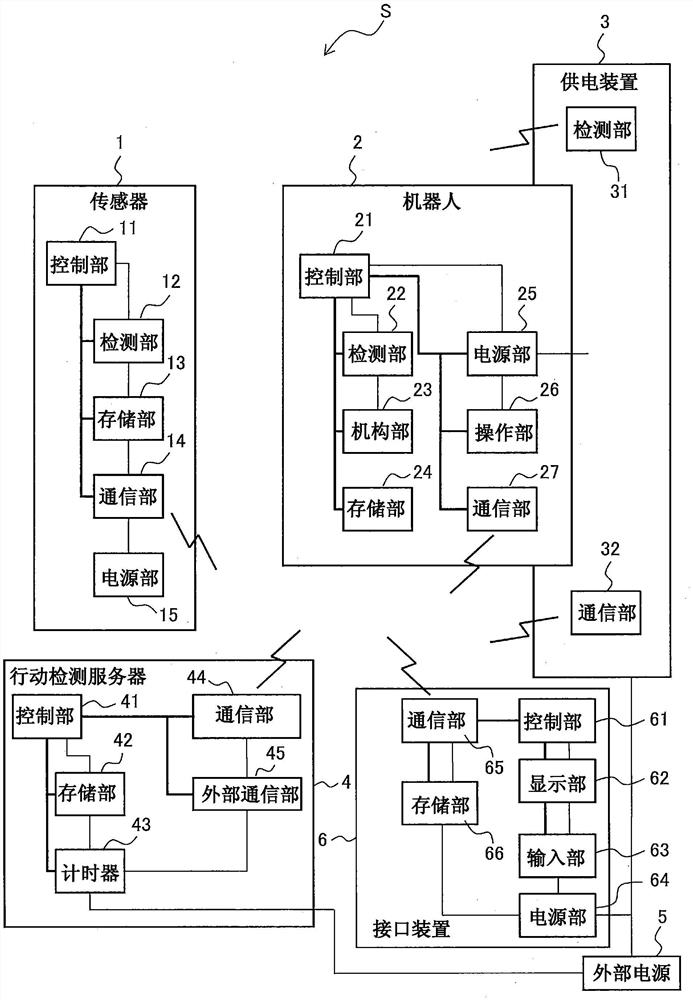
图1是表示行动检测系统S的结构的概略图。
如图1所示,行动检测系统S包括多个传感器装置1、移动机器人2、供电装置3和行动检测服务器4。
传感器装置1设置在室内并传感信息,用通信部14对外部发送信息。移动机器人2具有检测部22和机构部23等,是能够在室内移动的机器人。移动机器人2例如是具有清扫功能的机器人,但不限于此,也可以是玩具机器人或安防用机器人,并不限定。
供电装置3对该移动机器人2供电。行动检测服务器4的控制部41具有与多个传感器装置1和移动机器人2通信的通信部44。基于这些连接的传感器装置1和移动机器人2的检测信息,检测人或动物或其他机器人装置等移动体的行动和/或状态。
多个传感器装置1具有控制部11、检测部12(第一传感器)、存储部13、通信部14(第一通信单元)和电源部15,在图2所示的居住房间9内设置多个。
电源部15起动该传感器装置1并对各部供电。通信部14是无线或有线的通信模块,将传感器装置1的检测信息和传感器装置1的固有ID(IDentifier)发送至行动检测服务器4。存储部13例如是ROM(Read Only Memory)或闪存,存储传感器装置1的固有ID等。检测部12发挥检测室内的信息的第一传感器的功能。检测部12例如是用红外线或超声波等检测人等的人体传感器,能够检测人或移动机器人等移动体。控制部11控制检测部12的动作。
移动机器人2具有电源部25、机构部23(移动单元)、检测部22(第二传感器)、控制部21、存储部24、通信部27(第二通信单元)、和操作部26。移动机器人2在电源部25中具有二次电池(未图示),通过用供电装置3对该二次电池充电而进行动作。
电源部25使移动机器人2起动,并且对该移动机器人2的各部供电。机构部23是用于在室内移动的结构,例如由电动机和车轮构成。机构部23发挥能够在居住房间9的内部移动的移动单元的功能。
检测部22发挥检测室内的信息的第二传感器的功能。检测部22是检测移动机器人2的位置、或者检测人或动物等移动体的行动用的传感器组。控制部21例如是CPU(CentralProcessing Unit),分析检测部22的检测信息,基于该分析得到的信息控制移动机器人2的动作。存储部24例如是RAM(Random Access Memory)或闪存,存储控制部21分析得到的信息。通信部27例如是Wi-Fi(注册商标)的通信模块,在控制部21与行动检测服务器4之间发送接收信息。操作部26是使用者操作移动机器人2用的开关和按钮等。
供电装置3对移动机器人2供电。另外,供电装置3具有检测部31和通信部32。检测部31是检测移动机器人2的位置的传感器。通信部32例如是Wi-Fi(注册商标)的通信模块,在控制部21与行动检测服务器4之间发送接收信息。
另外,移动机器人2的检测部22包括红外线、超声波、激光、加速度、摄像机、声音识别等的传感器组、和检测机构部23的动作的传感器组。检测部22是包括检测自身所移动的空间的几何信息用的位置传感器的检测单元。由此,能够在室内移动。控制部21能够使用机构部23的动作信息和传感器组的检测信息识别自身位置。结果,移动机器人2的控制部21用检测部22分析居住房间9的几何信息,并使存储部24存储分析得到的几何形状的信息(居住空间地图)。由此,控制部21能够识别移动机器人2自身的位置。如果由通信部27接收目的地信息(几何信息),则移动机器人2能够向目的地移动。
另外,移动机器人2的控制部21能够经由通信部27对行动检测服务器4发送自身位置的空间信息(GI)。进而,移动机器人2的控制部21也具有用检测部22根据图像和声音识别人或动物等移动体的行动的识别单元。因此,移动机器人2的控制部21能够将检测到的移动体的状态的信息经由通信部27发送至行动检测服务器4。接收了状态的信息的行动检测服务器4的控制部41能够经由外部通信部45对外部发送该状态的信息。
行动检测服务器4包括控制部41、存储部42、计时器43、通信部44(第三通信单元)和外部通信部45。通信部44例如是Wi-Fi(注册商标)的通信模块,接收从传感器装置1和移动机器人2发送来的信息,并对移动机器人2发送信息。通信部44发挥能够与在室内设置的多个传感器装置1和移动机器人2通信的第三通信单元的功能。
外部通信部45例如是网络接口卡(NIC),与由传感器装置1和移动机器人2构建的网络以外的外部网络之间发送接收信息。控制部41分析从传感器装置1、移动机器人2和外部通信部45接收到的信息,基于其分析结果进行移动机器人2的控制。控制部41发挥基于多个传感器装置1检测到的传感器信息(第一检测信息)、和移动机器人2的检测部22检测到的信息(第二检测信息)、检测移动体的行动的控制单元的功能。
存储部42存储来自外部通信部45的输入信息和控制部41的控制信息。存储部42是存储表示设置有多个传感器装置1的位置的传感器位置信息、和移动机器人2所移动的空间的几何信息与多个传感器装置1所设置的位置的信息的对应关系的存储单元。控制部41将各传感器装置1所设置的位置作为在移动机器人2用位置传感器检测到的空间的坐标系中表达的位置信息存储在存储部42中。计时器43识别事件的发生时刻。
另外,行动检测服务器4的各功能也可以嵌入移动机器人2和传感器装置1中。
图2是表示第一实施方式的行动检测系统S所设置的居住房间9的图。
居住房间9是家庭等的室内,但除此以外也可以是公司的办公室或仓库等,并不限定。在居住房间9中,设置了7个传感器装置1-1~1-7和供电装置3,移动机器人2按粗线箭头的路径巡回。在粗线箭头的路径上,示出了各事件时刻Et1~Et8时的移动机器人2和人的位置。
在居住房间9中的起居室中,设置了传感器装置1-7、1-1、1-2,在传感器装置1-7附近设置了供电装置3。进而,在厨房中设置了传感器装置1-3,在其远处的餐厅中设置了传感器装置1-4。在下楼梯后的走廊中设置了传感器装置1-5,在门厅中设置了传感器装置1-6。另外,在并不特别区分各传感器装置1-1~1-7时,单纯记作传感器装置1。
对于传感器装置1-7附加NS7作为固有ID。传感器装置1-7的检测范围即特征空间NR7如虚线所示是起居室的左侧。
对于传感器装置1-1附加NS1作为固有ID。传感器装置1-1的检测范围即特征空间NR1如虚线所示是起居室的右侧。
对于传感器装置1-2附加NS2作为固有ID。传感器装置1-2的检测范围即特征空间NR2如虚线所示是起居室的右侧。
对于传感器装置1-3附加NS3作为固有ID。传感器装置1-3的检测范围即特征空间NR3如虚线所示是厨房。
对于传感器装置1-4附加NS4作为固有ID。传感器装置1-4的检测范围即特征空间NR4如虚线所示是餐厅。
对于传感器装置1-5附加NS5作为固有ID。传感器装置1-5的检测范围即特征空间NR5如虚线所示是走廊。
对于传感器装置1-6附加NS6作为固有ID。传感器装置1-6的检测范围即特征空间NR6如虚线所示是门厅。
通过以上所述,在居住房间9内设置的多个传感器装置1-1~1-7能够将对于各传感器装置1的检测信息(SD)附加了该传感器装置1的固有ID(NS)后的信息发送至行动检测服务器4。
图3是表示传感器设置信息(SI)的一例的图。
行动检测服务器4中设置有存储部42。在存储部42中,预先存储了表示居住房间9的每个特征空间的个别ID(NR1~NR7)、与设置的传感器装置1的固有ID(NS)的关系的传感器设置信息(SI)。
在该传感器设置信息(SI)中,能够追加存储与检测区域信息(RS)关联的几何信息(GI)。进而,行动检测服务器4的控制部41因为设置了计时器43,所以能够追加存储接收到传感器装置1的数据(NSi,SDi)时的时刻作为事件发生时刻(Et)。
图4是表示事件信息(EI)的一例的图。
图4所示的事件信息(EI)能够作为关于人的行动的检测的数据存储、保持。事件信息(EI)被作为每个传感器固有ID(NS)的数据管理。事件信息(EI)通过存储、保持居住房间9的每个特征空间的ID(NRj)和各传感器装置1的数据(SD)、事件发生时刻(Et)而构成。另外,如图3所示,特征空间(NR)与传感器ID(NS)也可以不是一对一地对应。
关于对传感器设置信息(SI)追加空间信息(GI),基于图7和图8的流程图进行说明。图5示出了传感器设置信息生成时的传感器装置1和移动机器人2的动作的概要。图6图示了各传感器(NSi)的每个时序的检测信息。如图5和图6所示,行动检测服务器4经由外部通信部45接收传感器设置信息生成模式时,行动检测服务器4的控制部41设置传感器设置信息标志Sf。行动检测服务器4的控制部41在设置了传感器设置信息标志Sf时,对移动机器人2发送起动信号,在移动机器人2起动后,在接收传感器装置1和移动机器人2的响应的状态下待机。
如图5所示,随着移动机器人2的动作,传感器装置1-7(NS7)、传感器装置1-1(NS1)、……、传感器装置1-6(NS6)、传感器装置1-7(NS7)依次进行反应。
如图6所示,行动检测服务器4的控制部41根据各传感器装置1的反应,接收传感器检测数据(NSi,SDi)。控制部41在接收传感器检测数据(NSi,SDi)时,从计时器43取得事件发生时刻(Et),对移动机器人2请求发送自身的位置。
移动机器人2中,设置了检测相对于供电装置3的位置的检测部22,能够在图5所示的坐标系中识别自身的位置。接受了该请求的移动机器人2的控制部21用检测部22测定以供电装置3为原点的坐标(X,Y)和移动机器人2与供电装置3之间的绝对距离R。之后,控制部21对行动检测服务器4响应测定的坐标(X,Y)和绝对距离R。
如图7所示,行动检测服务器4的控制部41根据接收到的传感器检测数据(NSi,SDi)识别检测到该数据的传感器装置1的固有ID。控制部41读取传感器设置信息(SI)内的相当于传感器固有ID的传感器装置1的检测区域坐标信息。检测区域坐标信息包括绝对距离R的最小值Rmin和最大值Rmax、坐标X的最小值Xmin和最大值Xmax、坐标Y的最小值Ymin和最大值Ymax。
控制部41对读取的检测区域信息、与从移动机器人2接收到的坐标数据(GI(R,X,Y))进行比较(S10)。控制部41判断以下式(1)和式(2)是否成立,来确定反应范围(S11)。控制部41更新检测区域信息(Rmax,Rmin,Xmin,Xmax,Ymax,Ymin),对传感器设置信息(SI)赋予几何信息(S12)。
[式1]
|R-R
[式2]
|R-R
如上所述,通过使传感器装置1的检测信息与坐标信息关联,能够使各传感器装置1的检测区域与移动机器人2生成的居住空间地图(LS)的空间坐标关联。
图8是表示传感器设置信息(GI)模式的处理的流程图。
在传感器设置信息模式下,如下所述地进行处理。行动检测服务器4的控制部41接收了传感器设置模式之后,设置传感器设置信息标志Sf(S40)。
在步骤S41中,行动检测服务器4的控制部41判断移动机器人2是否处于供电状态。行动检测服务器4的控制部41如果判断为移动机器人2处于供电状态(是),则前进至步骤S43的处理,如果判断为移动机器人2正在起动中(否),则前进至步骤S42的处理。
在步骤S42中,行动检测服务器4的控制部41指示移动机器人2向供电位置移动,并返回步骤S41的处理。由此,控制部41待机至移动机器人2成为供电状态。
在步骤S43中,行动检测服务器4的控制部41用计时器43取得事件发生时刻(Et),用各传感器装置1取得传感器检测数据(NSi,SDi)。控制部41将取得的传感器数据作为(Et,NSi,SDi)保持,前进至步骤S44的处理。
在步骤S44中,行动检测服务器4的控制部41对移动机器人2请求空间信息,从移动机器人2取得空间信息(GI(R,X,Y)),前进至步骤S45的处理。
在步骤S45中,行动检测服务器4的控制部41调用作为检测对象的传感器ID(NSi)的传感器设置信息,前进至步骤S451的处理。
在步骤S451中,行动检测服务器4的控制部41读取检测区域信息(RS)之后,前进至步骤S46的处理。该检测区域信息(RS)包括(Rmax,Rmin,Xmin,Xmax,Ymax,Ymin)的信息。
在步骤S46中,行动检测服务器4的控制部41判断检测区域信息(RS)中是否输入、存储了检测值。控制部41在不存在检测区域信息(RS)的情况下(否),前进至步骤S48的处理。控制部41在检测区域信息(RS)中存储了检测值的情况下(是),前进至步骤S47的处理。
在步骤S47中,行动检测服务器4的控制部41对检测区域信息(RS)与空间信息(GI,(R,X,Y))进行比较。控制部41确认移动机器人2的位置信息(GI,(R,X,Y))是否在检测区域信息(RS)的范围内、即过去的几何信息范围内。不在过去的几何信息范围内的情况下(否),行动检测服务器4的控制部41前进至步骤S48的处理。在过去的几何信息范围内的情况下,行动检测服务器4的控制部41前进至步骤S50的处理。
在步骤S48中,行动检测服务器4的控制部41将所存储的检测区域信息(RS)置换为来自移动机器人2的空间信息(GI(R,X,Y))而更新数据,前进至步骤S49的处理。
在步骤S49中,行动检测服务器4的控制部41累加计算探索区域面积,前进至步骤S50的处理。
在步骤S50中,行动检测服务器4的控制部41评价探索区域的累加值是否与探索空间的总面积一致。探索区域的累加值与探索空间的总面积一致的情况下(是),行动检测服务器4的控制部41前进至步骤S51的处理。探索区域的累加值与探索空间的总面积不一致的情况下(否),行动检测服务器4的控制部41返回步骤S41的处理。
在步骤S51中,行动检测服务器4的控制部41清除传感器设置信息标志Sf,结束传感器设置信息模式。
通过使用上述传感器设置信息(SI),行动检测服务器4的控制部41分离地检测传感器装置1对于移动机器人2的反应和传感器装置1对于人或动物等移动体的行动的反应。由此,控制部41能够将传感器装置1对于移动体的行动的检测信息作为事件信息(EI)存储。以下,基于图11和图13、图14的流程图说明将传感器装置1检测到的信息分离为移动体的行动和除此以外的数据的流程。
图9示出了移动机器人2和人同时行动时的传感器装置1的反应的概要。
在居住房间9中,设置了7个传感器装置1-1~1-7和供电装置3,移动机器人2按粗线箭头的路径巡回,在粗线箭头的路径上,示出了各事件时刻Et1~Et8的位置。图9所示的移动机器人2的路径与图2所示的路径不同。这是因为传感器设置信息模式已完成、已转移至事件信息模式。
图10图示了检测到的传感器(NSi)的每个时序的检测信息。
如图10所示,每当移动机器人2移动时,各传感器装置1在各事件时刻进行反应。即,在事件时刻Et1,传感器1-7(NS7)进行反应。在事件时刻Et2,传感器装置1-1(NS1)进行反应。在事件时刻Et3,传感器装置1-2(NS2)进行反应。在事件时刻Et4,传感器装置1-3(NS3)进行反应。在事件时刻Et5,传感器装置1-4(NS4)进行反应。在事件时刻Et6,传感器装置1-5(NS5)进行反应。在事件时刻Et7,传感器装置1-6(NS6)进行反应。在事件时刻Et8,传感器装置1-7(NS7)进行反应。
同样地,在人行动时,在事件时刻Et3传感器装置1-5(NS5)进行反应。在事件时刻Et4传感器装置1-6(NS6)进行反应。
如图11所示,行动检测服务器4的控制部41每当接收传感器装置1-i(NSi)的检测信息时,接收移动机器人2的自身位置的空间信息(GI(R,X,Y))。之后,控制部41对传感器设置信息(SI)中存储的检测区域(RS)与空间信息(GI(R,X,Y))进行比较(S20)。由此,控制部41生成对因移动机器人2的动作而反应的数据和除此以外的数据进行鉴别得到的事件信息(EI)(S21),并作为事件信息(EI)存储在存储部42中(S22)。
图12是仅提取了事件信息(EI)的图。
如图12所示,在事件时刻Et3传感器装置1-5(NS5)进行反应。在事件时刻Et4传感器装置1-6(NS6)进行反应。这是排除了检测到移动机器人2的信息后的检测信息,是表示检测到人或动物等的信息。这样,控制部41能够检测人或动物等移动体的行动。
以上事件信息模式在以下图13和图14中被处理。
图13是表示事件信息(EI)模式中的移动机器人2尚未起动时的处理的流程图。
在事件信息(EI)模式下,行动检测服务器4的控制部41在步骤S60中,从传感器装置1接收传感器检测信息(NSi,Et,SD),前进至步骤S61的处理。
在步骤S61中,行动检测服务器4的控制部41对移动机器人2确认是否起动。移动机器人2尚未起动时(否),前进至步骤S62的处理。移动机器人2已起动时(是),前进至图14所示的步骤S70。
在步骤S62中,行动检测服务器4的控制部41判断是否处于传感器设置信息模式。设置了传感器设置信息标志Sf的情况下,控制部41判断为处于传感器设置信息模式,返回步骤S60的处理。清除了传感器设置信息标志Sf的情况下,控制部41前进至步骤S63的处理。
在步骤S63中,行动检测服务器4的控制部41对事件信息(EI)请求对象的传感器(NSi)的过去的存储数据,前进至步骤S631的处理。
在步骤S631中,行动检测服务器4的控制部41从事件信息(EI)读取对象的传感器(NSi)的过去的存储数据,前进至步骤S64的处理。
在步骤S64中,行动检测服务器4的控制部41根据过去的存储数据计算比较数据,前进至步骤S65的处理。控制部41例如对于接收到的检测信息(NSi,Et,SD)进行平均化,由此计算比较数据。
在步骤S65中,行动检测服务器4的控制部41对检测信息(NSi,Et,SD)与比较数据(CD)进行比较。其差超过阈值ε
其差在阈值ε
图14是表示事件信息(EI)模式中的移动机器人2已起动时的处理的流程图。
在步骤S70中,行动检测服务器4的控制部41根据是否设置了异常模式标志EMf,确认是否处于异常处理模式。控制部41判断为处于异常处理模式的情况下(是),转移至图17的异常模式。控制部41判断为不处于异常处理模式的情况下(否),前进至步骤S71的处理。
在步骤S71中,行动检测服务器4的控制部41判断是否处于传感器设置信息模式。设置了传感器设置信息标志Sf的情况下(是),控制部41判断为处于传感器设置信息模式,返回步骤S60的处理。清除了传感器设置信息标志Sf的情况下(否),控制部41前进至步骤S72的处理。
在步骤S72中,行动检测服务器4的控制部41对移动机器人2请求自身位置信息GI(R,X,Y)。控制部41从移动机器人2取得自身位置信息GI(R,X,Y)时,前进至步骤S73的处理。
在步骤S73中,行动检测服务器4的控制部41根据移动机器人2的自身位置信息GI(R,X,Y)和传感器设置信息(SI),判别因移动机器人2而进行了反应的传感器装置1的检测信息。控制部41将因移动机器人2而进行了反应的传感器装置1以外的其他传感器装置1的检测信息判别为人或动物等移动体的行动检测信息(MI),前进至步骤S74的处理。
在步骤S74中,行动检测服务器4的控制部41对事件信息(EI)请求与行动检测信息(MI)进行比较的数据。
在步骤S741中,控制部41取得请求的数据,前进至步骤S75的处理。
在步骤S75中,行动检测服务器4的控制部41根据从事件信息(EI)得到的数据计算比较数据(CD),前进至步骤S76的处理。
在步骤S76中,行动检测服务器4的控制部41对行动检测信息(MI)与比较数据(CD)进行比较。比较的结果超过阈值ε
在步骤S77中,行动检测服务器4的控制部41将行动检测信息(MI)追加至事件信息(EI),返回步骤S60的处理。
使处理转移至异常模式后的行动检测服务器4的控制部41使用图15至图17和图18进行如下所述的处理。
图15示出了在日常行动(事件信息(EI))中、在Et3-Et4之间发生了NS5(传感器装置1-5)的反应的情况下、在Et4-Et5之间没有NS6(传感器装置1-6)的反应这样的异常状态时的处理的流程。
图16图示了检测到的传感器(NSi)的每个时序的检测信息。
如图16所示,在Et4-Et5之间没有传感器检测反应的情况下,行动检测服务器4的控制部41对事件信息(EI)与检测信息(NSi,SD)进行比较。事件信息(EI)与检测信息(NSi,SD)的差超过了阈值的情况下,控制部41判断为异常行动,对移动机器人2发送传感器设置信息(SI(R,X,Y))以使其前往发现了异常行动的(NSi)。事件信息(EI)与检测信息(NSi,SD)一致的情况下,行动检测服务器4的控制部41使检测模式继续。
以上移动诊断模式在图17中如下所述地处理。
行动检测服务器4的控制部41在步骤S80中,请求移动机器人2的自身位置(GI(R,X,Y)),取得移动机器人2的当前位置,前进至步骤S81的处理。
在步骤S81中,行动检测服务器4的控制部41与异常模式标志相应地多重分支。异常模式标志EMf是1的情况下,行动检测服务器4的控制部41前进至步骤S82的处理。异常模式标志EMf是2的情况下,行动检测服务器4的控制部41前进至步骤S85的处理。异常模式标志EMf是3的情况下,行动检测服务器4的控制部41前进至步骤S87的处理。
在步骤S82中,行动检测服务器4的控制部41对移动机器人2发送处于异常状态诊断模式的状况,发送目标坐标GIo(NSi,R,X,Y)和预测通过传感器(PS)(S83)。进而,控制部41将异常模式标志EMf设定为2(S84),转移至事件信息模式。
在步骤S85中,行动检测服务器4的控制部41通过对移动机器人2的自身位置(GI)与目标坐标(GIo)进行比较,而判断移动机器人2是否存在于异常探索区域。自身位置(GI)与目标坐标(GIo)的差不足阈值ε
在步骤S87中,行动检测服务器4的控制部41判断为处于异常探索模式,确认是否存在异常。关于是否存在异常的确认,可以使用移动机器人2的检测部22中设置的图像传感器和声音传感器得到的图像和声音,检测异常。在步骤S87中检测到异常的情况下(是),控制部41前进至步骤S88的处理而生成异常报告,用行动检测服务器4中设置的外部通信部45对外部的服务通知异常(S88),转移至事件信息模式。
在步骤S87中未检测到异常的情况下(否),控制部41前进至步骤S89的处理而生成探索报告,用行动检测服务器4中设置的外部通信部45对外部的服务器发送探索报告。发送探索报告之后,行动检测服务器4的控制部41前进至步骤S90的处理,重置异常诊断模式(S90),转移至事件信息模式。
本发明的行动检测系统S使在居住房间9内设置的多个传感器装置1与具有在居住房间9内移动的移动单元的移动机器人2协作。由此,行动检测系统S能够防止因传感器装置1的误动作而发生的错误信息的发送,同时确保使用者的隐私。
《第二实施方式》
图18是表示第二实施方式中的行动检测系统的结构的概略图。第二实施方式中,代替多个传感器装置1地在居住房间中设置多个家用电器8,代替传感器装置的检测信息地检测家用电器的操作信息和检测信息,由此检测人的行动。该多个家用电器8在第一实施方式中的传感器装置1的功能之外,也具备作为家用电器的各种功能。
如图18所示,行动检测系统S包括多个家用电器8、移动机器人2、供电装置3和行动检测服务器4。
家用电器8设置在居住房间内,实现各种功能,例如是电视机或照明或空调机等。家用电器8用通信部14对外部发送自身被操作时的操作信息。
多个家用电器8具有控制部81、检测部82、存储部83、通信部84、电源部85、无线标签86。电源部85起动该家用电器8,对家用电器8的各部供电。通信部84是无线或有线的通信模块,将对于家用电器8的操作信息和家用电器8的固有ID发送至行动检测服务器4。存储部83例如是ROM或闪存,存储家用电器8的固有ID。
《第三实施方式》
第一实施方式和第二实施方式以传感器装置1的位置固定为前提。但是,因为室内的扩建和改建、房间的用途的更改等,传感器装置1的个数、位置和它们监视的空间变化的情况较多。发生了这样的变化的情况下,第一(第二)的实施方式的行动检测系统也能够通过使机器人2运转,而生成反映了变更后的传感器装置1的位置和个数的传感器设置信息(SI)和事件信息(EI)。这样,第一(第二)实施方式的行动检测系统也能够生成传感器装置1的位置与机器人2所移动的空间的几何信息的对应关系。
但是,也能够由用户手动地输入传感器设置信息(SI)的一部分初始值,进而在改变传感器装置1的位置、个数等之后,再次手动地对传感器设置信息(SI)输入其变更内容。取决于用户,存在认为即使略微费事、灵活地进行该输入也会对于之后的行动检测系统的动作(发生异常时可靠地到达现场等)更具有安心感的情况。于是,第三实施方式的行动检测系统在传感器装置1、机器人2和行动检测服务器4之外也具有接口装置6。随着追加该结构,传感器设置信息(SI)的结构的一部分与第一(第二)实施方式相比变更(详情后述)。
图19是表示第三实施方式中的行动检测系统的结构的概略图。行动检测系统S具有接口装置6。接口装置6例如是便携式的计算机,在室内等由用户操作。接口装置6具有控制部61、显示器等显示部62、键盘、鼠标、触摸面板等输入部63、存储部66、与行动检测服务器4等通信用的通信部65、以及电源部64。存储部66存储传感器设置信息(SI)等。电源部64对控制部61等供给从外部电源5接受的电力。
图20是接口装置6的显示部62显示的接口屏幕71的一例。接口屏幕71在栏72中显示居住空间地图(LS),在栏73中显示传感器设置信息(SI)。此处显示的居住空间地图(LS)与图2中说明的表示居住房间9的图在以下方面不同。
·居住空间地图(LS)整体上被网格线(虚线)覆盖。
·居住空间地图(LS)示出了在起居室设置了传感器装置NS1和NS2、图2中的传感器装置NS2尚未配置的状态。
此处显示的传感器设置信息(SI)与图3中说明的传感器设置信息(SI)在以下方面不同。
·图20的传感器设置信息(SI)代替图3的传感器设置信息(SI)的事件发生时刻(Et)栏地,具有传感器种类(Type)、传感器ID(ID)、和检测范围(Area)各栏。
传感器种类是传感器装置1的检测部12的种类(红外线式、超声波式等)。
检测范围是1个传感器装置可以可靠地检测人等的空间的大小,此处是地板面上的面积。“Spot”表示不定义面积的情况(门厅的锁等)。
当前,用户有以下想法。
·在起居室的右侧部分,需要追加新的传感器装置NS2。
·该传感器装置NS2的传感器种类是“Oc”。
·该传感器装置NS2的检测范围以居住空间地图(LS)的网格的数量计是约16个。
·今后要将该传感器装置NS2的检测范围作为“NR2”管理。
此时,用户用鼠标等输入部63指定16个网格,在该指定的区域中,放置表示“NR2”的图标和表示“NS2”的图标。对于表示“NS2”的图标,关联该传感器装置的传感器ID和传感器种类。这样,接口装置的控制部61生成传感器设置信息(SI)的新记录74,在接口屏幕71的栏73中显示。
该处理是追加传感器装置的情况下的例子,但像行动检测系统S的使用开始时这样,也存在一次进行关于多个传感器装置的输入的情况(传感器初始信息输入)。但是,在初始输入的阶段,居住空间地图(LS)尚未存在,所以用户并非使用图标等,而是对于传感器设置信息(SI)直接输入字符串等。随着这样的处理发生,第一实施方式中的传感器设置信息模式的流程图(图8)被部分变更。
图21是表示传感器设置信息模式的处理的流程图。图21中,对于图8追加了步骤S40b,图8的步骤S43、S44和S45分别被置换为步骤S43b、S44b和S45b。以下,说明步骤S40b、S43b、S44b和S45b。
在步骤S40b中,接口装置6的控制部61接受传感器初始信息(NS,Type,ID,Area)的输入。具体而言,控制部61在显示部62上显示接口屏幕71的栏73,接受用户对NS、ID、Type、Area和NR各栏经由输入部63输入数据。用户对于全部传感器装置1反复该输入操作。控制部61将关于全部传感器装置1的记录作为传感器设置信息(SI)存储在存储部66中。
在步骤S43b中,接口装置6的控制部61对移动机器人请求空间信息。具体而言,控制部61对移动机器人2请求空间信息(GI(R,X,Y))。
在步骤S44b中,接口装置6的控制部61从移动机器人取得空间信息,接受用户输入传感器装置的位置的变更。具体而言,首先,控制部61从移动机器人2取得空间信息(GI(R,X,Y))。
第二,控制部61使用步骤S44b的“首先”中取得的空间信息,在接口屏幕71的栏72中显示居住空间地图(LS),对用户提示输入传感器位置的变更。这样,用户如上所述,在栏72中显示的居住空间地图(LS)上,进行关于发生了变化的传感器装置的输入操作。
在步骤S45b中,接口装置6的控制部61对于各NS定义检测区域。具体而言,控制部61将与步骤S44b的“第二”中输入的数据对应的记录显示在接口屏幕71的栏74中。控制部61将变更后的记录作为传感器设置信息(SI)的一部分存储在存储部66中。
(人和机器人的移动)
图22是说明人的移动的图。此处,设想起居室1、厕所5和浴室8被走廊2、走廊3、走廊4、走廊6和走廊7连结的居住空间地图81。它们对应于传感器装置NSi(i=1,2,……,8)。另外,此处的编号(1,2,……)是专门为了图22中的说明目的的编号,与图1中的相同编号并不具有直接的关系。传感器装置NSi检测某1天的人的移动的结果是图表82。图表82的横轴是时间,纵轴是各传感器装置的个别ID(NSi)。某一传感器装置检测到人时,在该时段该传感器装置的“图线(粗实线)”凸状地变化。
传感器装置1多次反复这样的检测时,人的通常时的移动在图表82中表现为“模式”。例如,模式1是人从起居室1移动至厕所5、之后返回起居室1的情况下的图线的组合。模式1在1天中例如周期性地出现5、6次。NS1、NS2、NS3、NS4和NS5各自的凸部的时间宽度每次大致相同。
模式2是人从起居室1移动至浴室8、之后返回起居室1的情况下的图线的组合。模式2在1天中例如在夜间周期性地出现1次。NS1、NS2、NS3、NS4、NS6、NS7和NS8各自的凸部的时间宽度每次大致相同。
图23是说明异常发生时的人和机器人的移动的图。关注模式1b时,在走廊3(NS3)处,图线的凸部的时间宽度与图22的时间宽度相比显著变长。行动检测服务器4的控制部41在时刻t1检测到异常,对于机器人2发送目标坐标GIo。这样,机器人2向人摔倒的可能性高的位置(走廊3)移动。
关注模式1c时,在走廊4(NS4)处,通常的时间宽度的凸部出现后,在任意NSi中都没有出现凸部。行动检测服务器4的控制部41在时刻t2检测到异常,对机器人2发送目标坐标GIo。这样,机器人2向人被绑架的可能性高的位置(走廊4)移动。
关注模式2b时,在浴室8(NS8)处,图线的凸部的时间宽度与图22的时间宽度相比显著变长。行动检测服务器4的控制部41在时刻t3检测到异常,对于机器人2发送目标坐标GIo。这样,机器人2向人晕倒的可能性高的位置(浴室8)移动。
(变形例)
本发明不限定于上述实施方式,包括各种变形例。例如,上述实施方式是为了易于理解地说明本发明而详细说明的,并不限定于必须具备说明的全部结构。另外,能够将某个实施方式的结构的一部分置换为其他实施方式的结构,也能够在某个实施方式的结构上添加其他实施方式的结构。另外,对于各实施方式的结构的一部分,能够追加、删除、置换其他结构。
对于上述各结构、功能、处理部、处理单元等,例如可以用集成电路等硬件实现其一部分或全部。上述各结构、功能等,也可以通过处理器解释、执行实现各功能的程序而用软件实现。实现各功能的程序、表、文件等信息,能够放置在存储器、硬盘、SSD(Solid StateDrive)等记录装置、或者闪存卡、DVD(Digital Versatile Disk)等记录介质中。
各实施方式中,控制线和信息线示出了认为说明上必要的,并不一定示出了产品上全部的控制线和信息线。实际上也可以认为几乎全部结构都相互连接。
作为本发明的变形例,例如有如以下(a)~(e)所述的例子。
(a)可以不设置行动检测服务器4,由移动机器人2执行事件信息模式的处理和异常模式的处理。
(b)可以不设置行动检测服务器4,由各传感器装置1自主地执行事件信息模式的处理和异常模式的处理。
(c)行动检测服务器4的通信部44与外部通信部45可以是共用的。
(d)第一实施方式的移动机器人2可以具有无线标签,由传感器装置1检测该无线标签。由此,传感器装置1能够可靠地检测移动机器人2。
(e)即使传感器设置信息模式结束之后,也可以在检测到传感器位置的变更时,修正存储部中存储的传感器位置信息。
附图标记说明
S 行动检测系统
1,1-1~1-7 传感器装置
11 控制部
12 检测部(第一传感器)
13 存储部
14 通信部(第一通信单元)
15 电源部
2 移动机器人
21 控制部
22 检测部(第二传感器)
23 机构部
24 存储部
25 电源部
26 操作部
27 通信部(第二通信单元)
3 供电装置
31 检测部
32 通信部
4 行动检测服务器
41 控制部
42 存储部
43 计时器
44 通信部(第三通信单元)
45 外部通信部(外部通信单元)
5 外部电源
6 接口装置
61 控制部
62 显示部
63 输入部
64 电源部
65 通信部
66 控制部
8,8-1~8-7 家用电器(传感器装置)
81 控制部
82 检测部(第一传感器)
83 存储部
84 通信部(第一通信单元)
85 电源部
9 居住房间。
- 行动检测系统、接口装置和机器人
- 行动检测系统、行动检测装置、行动检测方法以及行动检测程序