一种远心相机参数超定方程求解方法
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及立体视觉领域,具体涉及一种远心相机参数超定方程求解方法。
背景技术
在立体视觉领域中,相机的内外参数的求解结果的好坏直接影响成像以及测量的质量与精度。而在求解相机的内外参数过程中往往离不开求解超定方程。
相机标定的常用方法主要是由张正友在2000年提出的针孔相机模型的标定方法(Zhang Z.A Flexible New Technique for Camera Calibration[J].IEEE Transactionson Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.)。上述方法的远心相机成像模型较复杂,在存在旋转角以及倾斜角的情况下相机参数超定方程求解的求解复杂,求解速度受限。
发明内容
本发明的目的在于提供一种远心相机参数超定方程求解方法,在降低计算的复杂程度的同时达到标定的要求。
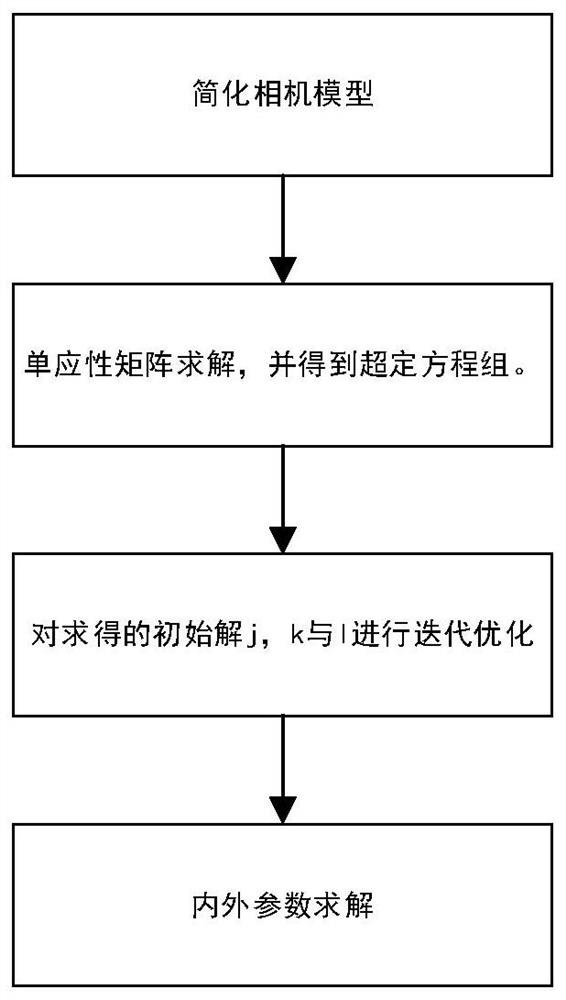
本发明的技术方案如下:一种远心相机参数超定方程求解方法,实现的步骤如下:步骤一,简化相机模型的超定方程组,
远心相机参数求解方程组如下,
其中,[u v 1]
得到简化的方程组为,
步骤二,将内参数以及外参数矩阵相乘得到单应性矩阵,利用N组相对应的像素以及世界坐标求解出单应性矩阵,并由
步骤三,对关系式中求解出来的初始解j,k与l进行迭代优化,最后得到最优的j,k与l的值;
步骤四,利用j,k与l之间的关系可以求解出α,β与m。
优选的,步骤二中,将公式(3)的方程组带入N组对应坐标得到,
求解得单应性矩阵H
步骤三中j,k,l三个参数的求解过程如下,
由,
整理得,
令,
根据目标方程优化初始解,目标方程为F
其中,
由公式(11)解出方程的初始解,
给定允许误差为ε,ε为一个极小数,且大于0,计算
其中n为迭代次数,初始值为1,每迭代一次,n的值加1,若
其中,
A((j,k,l)
E为单位矩阵,λ为阻尼因子,当每得到一组解时,重新计算
优选的,步骤四中,由公式(2)可得,
由公式(16)便可以解出α的值,m与β的值也可由公式(2)求解得出。
本发明与传统方法相比,提出了一种新的更加简洁的远心相机参数超定方程的求解方法,比以往的求解方法更加简单,降低了计算的复杂程度。
附图说明
图1为本发明实施例中远心相机参数超定方程求解方法的流程图。
图2为本发明实施例中远心相机成像模型。其中,l
图3为本发明实施例中远心相机的坐标系。通过将旋转矩阵添加到理想的双远心相机成像模型中,将倾斜传感器的成像坐标(对应于捕获的图像)与理想(非倾斜)成像坐标相关联。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本申请,并不用于限定本申请。
本实施例的方法,可简单描述为:首先简化超定方程组,将u0、v0设置为0,将内参矩阵的第三列以及世界坐标的z轴去掉,并分别令j,k与l等于m/cosβ,m/cosα以及-mtanαtanβ,即得到简化后的方程组。然后利用N组相对应的像素以及世界坐标求解出单应性矩阵,并由
步骤一,简化相机模型的参数方程。
相机模型的参数方程如下所示,
其中,[u v 1]
首先简化外参矩阵,将u0、v0设置为0。
其次将内参矩阵的第三列以及世界坐标的z轴删除,并且令,
可以得到简化的方程为:
步骤二,求解单应性矩阵。将上述方程组并带入N组对应坐标就可以得到:
求解就可以得到单应性矩阵H
步骤三,求解j,k,l三个参数并进行迭代优化。
由,
整理得,
令,
根据目标方程优化初始解,目标方程为F
其中,
由公式(11)解出方程的初始解,
给定允许误差为ε,ε为一个极小数,且大于0,计算
其中n为迭代次数,初始值为1,每迭代一次,n的值加1,若
其中,
A((j,k,l)
E为单位矩阵,λ为阻尼因子,当每得到一组解时,重新计算
步骤四,求解α,β与m。
由公式(2)可得,
由此便可以解出α的值。m与β的值也可由公式(2)求解得出。
- 一种远心相机参数超定方程求解方法
- 一种时变超定线性方程组的最小二乘解求解方法