机器人的预测控制方法及相关控制系统
文献发布时间:2023-06-19 11:26:00
技术领域
本公开涉及机器人控制方法,并且更特别地,涉及用于控制旨在与人类操作员协作的机器人,预测人类操作员将要执行的活动以便准备遵守此活动的方法,以及系统、机器人的控制微处理器和相关的计算机程序。
背景技术
随着机器人技术的发展,可以预见的是,在将来,被设计为与人类操作员合作的机器人的存在将会增加,以帮助操作员执行他们的工作。特别地,机器人可以方便地用于以基本上机械的方式快速完成任务,而人类操作员可以与机器人独立地完成要执行的最困难的任务。
由于工业机器人的改进的运动控制程序,因此有可能实现可以自主执行与一个或多个人类操作员共享工作空间的任务的机器人。这样的解决方案允许机器人与人类操作员在同一环境中共存,但是在该环境中,每个或两个主体必须独立于另一个主体完成其任务,以实现自己的目标。
但是,当要执行的工作由需要人类智慧的操作以及机械操作组成,而这些操作可以在不知道要完成的所有工作和要达到的目的的情况下被单独地执行时,这种类型的细分并不总是可行的。一般而言,在存在需要高度理解的操作的所有那些工作中,除非使用复杂且昂贵的技术,否则人类操作员可以轻松完成操作,而机器人不容易完成操作,这将需要大量投资并增加生产成本,因此将整个工作分配给人类操作员似乎是必不可少的。
为了克服此限制,实现了协作机器人,有时也称为新词“cobot”或“co-robot”,其可以与共享相同工作空间并与他们紧密协同地交互的人类操作员协作,以达到期望的结果。例如,可以由“cobot”执行的任务可以是图1中示意性说明的任务。人类操作员可以在以数字1到4标识的四个工作分区的一个中动作,在从1到3的分区中工作,并在分区4中释放一件,当人类操作员在分区1到3中工作时,机器人必须执行另一项任务,并且一旦件被放置,机器人中断他的任务以从分区4中取出该件并将其移到其他地方。
可以使用的解决方案基本上是基于对分配给人类操作员而非机器人的不同任务的仔细规划,但事实证明它们并不是特别灵活或高效。尤其是,机器人与人类操作员之间紧密合作的局限性在于,人类操作并非总是严格按照相同的方式或相同的持续时间重复。例如,人类操作员的规划工作时间的小延迟会导致机器人工作效率的损失,机器人可能在分区4中等待取件较长时间而保持静止,而不是仅在人类操作员实际释放工件时才中断其活动。
发明内容
为了克服这些限制,已经设计了一种用于预测人类操作员活动的程序,可用于机器人的控制方法中,以使得仅当人类操作员即将进入工作分区以与机器人协作执行任务时,才使机器人准备好与人类操作员协作来执行任务。
本公开的预测控制方法可以通过包括检测设备、存储器以及对微处理器的控制单元的控制系统来实现,检测设备例如是一个或多个相机或配备有传感器的垫,其检测工作空间中操作员的手或整个身体的位置,在存储器中存储人类操作员从事的工作的分区的标识数据,在分区中的停留时间的标识数据以及人类操作员在其中移动的后续工作分区的标识数据,控制单元根据本公开的方法处理存储在存储器中的这些数据,以预测操作员将在哪个工作领域中移动他的手以及将何时发生,并基于预测信息控制机器人。
可以通过由微处理器单元执行的软件来实现本公开的方法。
提交的权利要求是本公开的组成部分,并且通过明确引用并入本文。
附图说明
图1示出了由与操作员协作的机器人支持的人类操作员的工作站的示例。
图2示出了根据本公开的实施例的固定机械臂的控制系统,固定机械臂与工作台上的在两个工作分区之间仅移动他的手的操作员协作。
图3示出了根据本公开的另一实施例的与操作员协作的移动机器人和固定机械臂的另一控制系统。
图4示出了示例性时间图,其中标识了人类操作员对工作分区的连续占用。
图5示出了可达树的示例,具有经过人类操作员的工作空间被划分为的其他工作分区通向感兴趣的工作分区的转移序列的代表性分支。
图6是流程图,其示出了用于在预定时间范围期满之前确定可达图的通向感兴趣分区的分支的过程。
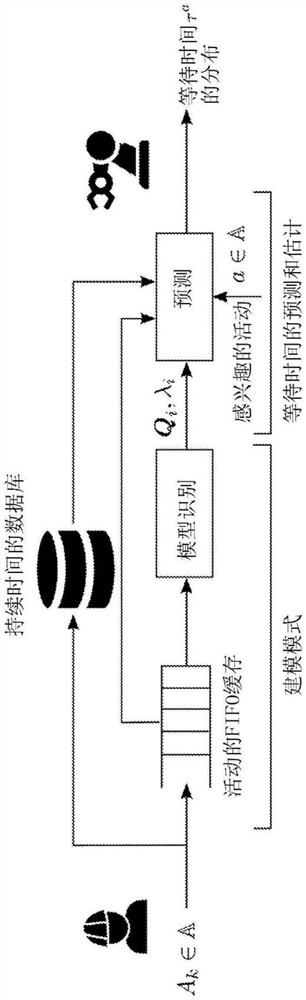
图7示出了框图,其综合地示出了根据本公开的控制方法的步骤的执行。
图8描述了人类操作员的示例性周期性工作序列,其顺序地占用图1中示出的工作分区1、2、3、4。
具体实施方式
为了改善需要人类操作员与协作机器人(“cobot”)协同合作的工作的性能,已经设计了一种方法来预测人类操作员的活动,以便机器人可以在操作员即将完成他的任务(使用剩余时间进行其他活动)时准备进行它的任务,并在操作需要由操作员和机器人同时进行(例如运输笨重的或沉重的物体)时做好准备。实质上,本公开的方法允许:
-预测人类操作员在当前活动结束时最有可能进行的活动;
-预测需要与其的机器人协助或同步的给定人类操作员活动何时开始。
例如,本公开的方法在组装任务中可以被有用地实现,在组装任务中,人类操作员和机器人都具有要执行的单独的子任务,以及必须执行以完成组装的联合动作。要协作执行的任务要求人类操作员和机器人同时可用,而单独分配给机器人和人类操作员的其他子任务可以在任何其他时间执行。
根据本公开,人类操作员的工作空间被划分为可以由操作员的手或操作员的整个身体占用的工作分区。它检测工作过程中手或操作员身体的位置,手(或操作员的整个身体)在特定工作分区中停留多长时间,以及当操作员离开当前的工作分区后将在其中移动的下一个任务的分区是哪个。观察在工作的操作员,将记录存储在数据库中,记录至少指示当前的工作分区及在其中花费的时间。
此方法通过如图2和图3所示的控制系统来实现,控制系统包括检测装置,检测手的位置或操作员的整个身体的位置。例如,图2示出了根据本公开的实施例的固定机械臂1的控制系统,固定机械臂1与操作员5协作,与工作台相比,操作员5的身体基本上是静止的,仅在用虚线界定的两个分区6之间移动他的手。一个或多个相机2检测人类操作员5的手的位置,以确定手在操作员的左边和右边的哪个分区6中。处理关于操作员或他的手的位置的数据,以便构成用于识别当前工作分区以及在其中花费的时间的记录,并且这些记录存储在数据库8中。微处理器的控制单元7使用本公开的方法处理存储在数据库8中的记录,以预测操作员将在哪个工作分区中移动他的手以及何时移动,以便命令机械臂1以尽可能长时间地执行其子任务,并且当操作员需要合作时不参与。
图3示出了根据本公开的另一实施例的固定机械臂1和移动机器人4的另一控制系统,固定机械臂1和移动机器人4与在虚线界定的各个工作分区6之间移动的操作员5协作。在这种情况下,人类操作员5必须执行某些任务,包括从由移动机器人4装满的一个或多个容器3中拾取物体,然后移动到其他工作分区(可能与固定机械臂1协作)中的一个。与先前的示例不同,人类操作员5不是坐在工作台旁而是从一个分区移动到另一个分区。可以利用一个或多个相机2或利用用于检测操作员的位置的其他设备(例如带有内置传感器的垫,其可以检测操作员5的脚部施加的压力)来检测操作员5的身体的位置。
除了操作员从一个分区移动到另一个分区或者静止不动并且仅移动他的手这个事实之外,无论用于检测操作员5或他的手的身体位置的检测器,存在包含当前工作分区以及在这个工作分区花费的时间的记录。
根据本公开的方法,用A
P(A
其中a、k
为了简化如上所述的转移概率的计算,在通过引用并入本文的AE Raftery的文章“A model for high-order Markov chains”,杂志Royal Statistical Society,Series B(Methodological),528-539页,1985年中,提出了以下近似:
其中,确定参数λ
也就是说,转移到通用分区A
用{A
其中Q是转移概率的矩阵
Q={{P(A
根据WK Ching等人在文章“Higher-order Markov Chain models forcategorical data sequences”,Naval Research Logistics(NRL),51卷,4期,557-574页,2004年(通过引入并入本文)中提出的更灵活的数学模型,在每个步i处更新转移概率矩阵Q:
在根据本公开的方法中,通过适当地选择参数λ
对于每个数据库条目,条件是
一旦估计了操作员在通用工作分区中移动的概率分布
根据本公开的方法,在通用步k处可以估计概率分布
由前两个公式总结的数学模型仅允许预测从一个工作分区转移到另一个工作分区的概率,并且没有考虑操作员在工作分区中花费的时间。必须估计这些停留时间,以便机器人可以中断其独立执行的子任务,并可以在操作员即将移动时及时准备与操作员协作。为此,估计在通用工作分区“a”中的停留时间,即在分区“a”中执行任务所需的时间,作为不能小于正值
目标是估计通用等待时间τ
P(τ
从理论上讲,有必要构建可达树,描述从一个工作分区到另一分区的所有连续的转移,并以占用工作分区“a”以执行相关活动为结束。由于此可达树可以是无限的,因此时间范围ΔT是有限的,即,上述指示的概率被计算到时刻
通常,可以使用允许识别可达树的通向感兴趣分区“a”的所有分支的任何过程,在感兴趣分区“a”中,人类操作员必须执行需要机器人的合作的活动。根据本公开的实施例,这种过程可以由图6的流程图综合示出,其中数字标识下表中指示的操作:
一旦找到通向感兴趣分区的可达树的分支,通过将由被考虑的分支描述的从分区i到分区j的每个转移p(i,j)的概率相乘,计算与可达树的每个弧相关联的概率:
到达考虑的分支末端的估计等待时间由分支的各个分区(从分区i到分区j)的预期停留时间的和给出:
给定与每个分支相关联的时间分布,可以将需要机器人的协作的工作分区“a”中要执行的任务的等待时间的总体分布计算为与通向分区“a”的每个分支(在时间范围ΔT内)相关联的等待时间的加权和,即:
当以某一频率连续执行本公开的方法时,可以迭代地更新等待时间的估计和从一个工作分区到另一工作分区的转移的概率。
在图7中示出了说明上述方法的框图。通过相机或其他检测装置来识别工作分区A
例如,假设机器人必须与人类操作员一起工作的感兴趣分区是工作分区编号4,那么人类操作员的活动可以通过图8的时间图来表示,图中描述了涉及图1中的工作分区1、2、3、4的周期性工作序列,具有相关持久时间并按以下顺序:
1-2-3-1-4
根据本公开的方法允许在人类操作员进入工作分区4以执行需要机器人的协作的活动之前即时估计等待时间τ
由于所提出的方法是通过由微处理器单元执行的软件实现的,因此可以控制机器人停止或以其他方式组织其自主活动,以准备及时与人类操作员协作,从而最小化机器人或人类操作员停下来以等待其他对象准备好进行协作活动的停工期。
- 机器人的预测控制方法及相关控制系统
- 模型预测控制装置、模型预测控制程序、模型预测控制系统及模型预测控制方法