包装抓取器系统
文献发布时间:2023-06-19 11:27:38
技术领域
本发明基于根据权利要求1的一般术语定义的包装抓取器系统,其中,负荷承载装置是承载装卸站的一部分,通过该承载装卸站可实现单独的板式和单独的片式包装的抓取、夹紧、提升以及垂直定向地放置到保持和存储容器的适当尺寸以及尺寸仅略大的容器开口中。
背景技术
为此,负荷承载装置必须配备便捷的故障保护运动驱动器,该驱动器使抓取指能够执行水平定向的抓取和夹紧以及垂直定向的提升和放下操作。在这种情况下,负荷承载装置应被设计为外部抓取器,在其抓取指的内侧设置有垂直的夹紧面。
这种负荷承载装置的现有技术的特征在于不同类型和设计的运动驱动器以及不同的夹爪和抓取指布置。作为另外的特别是与负荷相关设计的负荷承载装置的示例,在下文所示的本发明公开中描述了一些公开的外部抓取器方案。
DE 10 2012 0 12 819 A1的主题是用于电池模块的抓取装置,并且出版物DE 19733 495 B4涉及一种用于提升和降低负荷、尤其是机电或电气部件的承载装置,其中,这些负荷的垂直运动需要将其中心环凸耳附接到起重机吊钩,或附接到带有起重机吊钩和水平抓取元件的单独的负荷悬挂齿轮,其调节和运动需要操作员手动操作。横梁布置使得阶梯式或枢转式抓取元件配置成为必要,并且这些负荷承载装置需要较大的空间要求。
根据出版物SU 878722中的描述的用于包装件货物的吊具系统的抓取指具有节省空间的设计。用于附接到起重机的负荷悬挂齿轮具有复杂的多部件结构,并且无法被无级地调节。
出版物DD 68 358中的主题是一对用来提升重物的钳子,其中,单个工件或工件包通过剪式杠杆系统被抓取,该杠杆系统使用旋转抓取器,其中,抓取器间距可被无级地调节。该抓取器系统设置有:液压运动缸,其使抓取器在垂直的主冲程方向上运动;以及所谓的气压缸,用于使抓取器在水平方向及其辅助冲程方向上的枢转运动,作为运动驱动的自主的独立能源。因此,其结构复杂且具有多部件设计。该负荷承载装置的抓取元件的布置和运动占据大量空间。
如出版物DE 20 2014 100 898U1中描述的电动自给式负载装卸齿轮的驱动元件是由电动机驱动的主轴,用于抓取器件的闭合和打开运动,该抓取器件被设计为带有枢转式夹爪的抓取钳。用于该负荷承载装置的电源是布置在单独横梁上的蓄电池。
这些现有技术的负荷承载装置的缺点被总结如下:
·旋转钳和多个抓取指布置所需的空间大,
·提升和夹紧力不可调节以及缺乏安全控制,尤其是在手动操作负荷承载装置时,以及抓取指的夹紧宽度无法被无级地调节以及相对于彼此重新调节的事实。
必须实现的目标是,在包装抓取器系统中设计负荷承载装置,以使它们
·具有结构简单、可无级调节的设计,以及
·设置有便捷的驱动系统,通过该驱动系统,能够对单独的板和单独的片的垂直夹紧面或者板和片的堆叠施加更大的夹爪和抓取指的夹持力和摩擦力;以及
·能够实现小型的旋转钳和多个抓取指布置。
发明内容
通过针对专利权利要求1所述的特征解决了在上文中所描述的现有技术的系统的问题,涉及负荷提升装置和作为外部抓取器的负荷承载装置的设计,所述负荷提升装置和所述负荷承载装置作用于板或片的垂直夹紧表面以及由单独的板和单独的片构成的板和片的包装上的垂直夹紧表面,以及用于需要提升的类似的单独的部件和部件包。
负荷承载装置在本文中被称为包装抓取器系统,其被设计用于将先前被抓取、夹紧和提升的板或片的包装或堆叠垂直定向地放置到具有适当尺寸以及尺寸仅略大的容器开口的存放容器中。所述包装抓取器系统包括框架式机架,其中,驱动模块布置在该机架的上侧。驱动模块被设计为电动缸的形式,并且包括线性驱动器,该线性驱动器由电动机驱动并且在两个端部位置之间在垂直方向上往复运动。该线性驱动器通过多个剪式接头杠杆组件运动地连接到抓取指承载装置,该多个剪式接头杠杆组件对称地布置在彼此下方并且附接到框架式机架的前部。抓取指负载承载装置附接到框架式机架的下侧。所述装置配备有两个水平定向的抓取指支架,这两个抓取指支架在存放容器上突出并且可在水平方向上运动。每个抓取指支架支撑至少三个条状或杆状的抗弯曲刚性抓取指,这些抓取指垂直定向地布置在两侧并且附接到两个支架,并且通过它们,紧靠抓取指平放并位于抓取指之间的板和片的包装或堆叠在驱动器模块施加的保持力和压紧力下被夹紧在抓取指之间,保持垂直和水平定向,并且准确地下降到位并固定在存放容器中。
补充特征在专利权利要求2至4中进行了说明,并且涉及
·剪式接头杠杆组件的配置和结构,
·可调性,以及
·抓取指支架和抓取指之间相对于彼此的距离/间隙的尺寸调节。
附图说明
通过附图中的实施例阐述了所提出的发明,并且在下面的描述中进行更详细的说明,其中
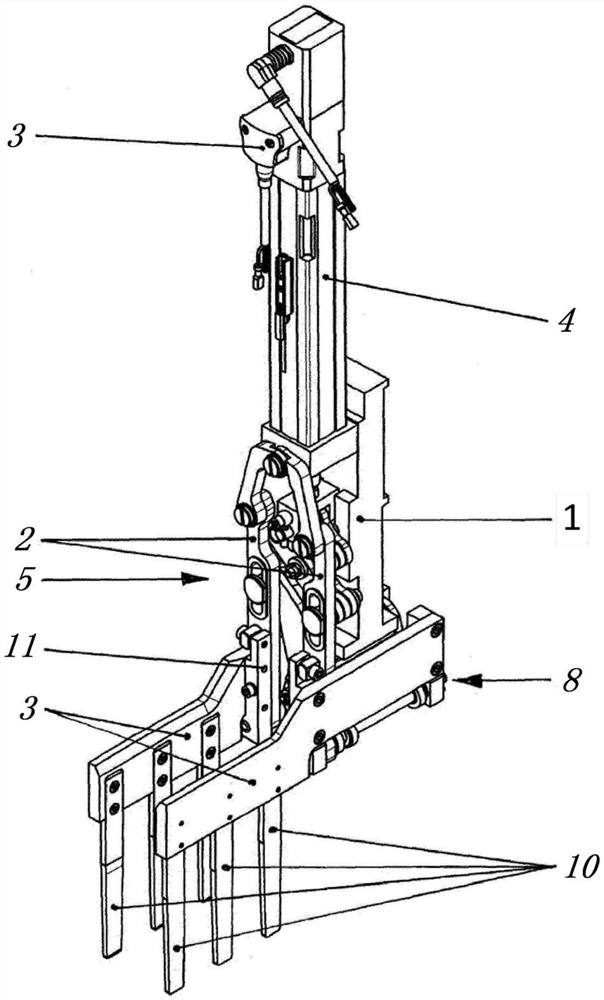
图1示出了包装抓取器系统的负荷承载装置的3D局部视图,
图2描绘了根据图1的负荷承载装置的前侧视图,以及
图3示出了图1所示的包装抓取器系统的角度和剪式接头杠杆组件的前侧视图。
具体实施方式
图1所示的负荷承载装置构成包装抓取器系统的一部分,其基本上由框架式机架1组成。驱动模块3附接到框架式机架1的上侧,所述驱动模块被设计为电动缸的形式并且包括可垂直运动的线性驱动器4,该线性驱动器由电动机驱动。剪式接头杠杆组件5在框架式机架的前侧对称地安装在彼此下方;通过这些组件,线性驱动器4的垂直运动作为水平和垂直定向的运动被传递到位于框架下侧的抓取指负荷承载装置8的抓取指10。通过同样布置在框架式机架前侧的两个平行的保持和导向杆2,在升高和降低的包装位置处,抓取指10的夹紧宽度以及夹紧位置和开口宽度通过剪式接头杠杆组件5被设置和调节,以改变距离/间隙。两个抓取指支架9分别用于三个布置的抓取指10,并且分别通过上部连接部件11支撑在保持和导向杆2上。
在图2中,包装抓取器系统的负荷承载装置被显示为处于降低的位置。板和片的包装12的两侧被布置在抓取指支架9上的抓取指10夹紧,并且被下降到存放容器13的略大的容器开口中,放下并由此装箱。在由线性驱动器4的运动和剪式接头杠杆组件5的枢转运动引起的保持和导向杆2的垂直下降运动之后,位于抓取指支架9上的抓取指10与板和片的包装12处于下部夹紧位置。
在图3中另外示出了四个剪式接头杠杆组件5的结构,通过剪式接头杠杆组件5,由线性驱动器4驱动的抓取指10以垂直指向的方式下降并被调节成以夹紧宽度14间隔开。以下接头通过接头销7连接到线性驱动器4:
·两个成角度的打开和关闭的枢转接头,以及
·在万向节中前后枢转的两个接头,
每一个配备有两个剪式接头连杆6,并且每一个配备有
·处于对称中心位置的接头销7,以及
·在两个平行的保持和导向杆2中布置的长孔中的两侧的接头销7
以上各个接头中,一个布置在另一个的下方,从而可枢转地运动以及以垂直指向的方式纵向引导地运动,并且与抓取指10可运动地连接。
在附图中未示出包装抓取器系统的另外的模块,该系统具有作为复杂的承载装卸站的一部分的负荷承载装置,通过负荷承载装置,可以完成例如电池模块的联接、装箱和运输,该电池模块包括作为适当尺寸设计的电池容器中的单个板的机加工的包装/堆叠。
附图标记列表
1 框架式机架
2 固定和导向杆 在1上
3 驱动模块
4 线性驱动器 3的
5 剪式接头杠杆组件
6 剪式接头连杆 5的
7 接头销 用于5
8 抓取指负荷承载装置
9 抓取指支架 在8上
10 抓取指 在8上
11 上部连接部件 在9和2之间
12 板和片的包装
13 存放容器 用于12
14 (可调)夹紧宽度 在10之间
- 包装抓取器系统
- 一种用于包装机的抓袋转运系统