一种基于通信技术的橡胶垫自动化翻面调节装置
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及通信与自动控制技术领域,具体为一种基于通信技术的橡胶垫自动化翻面调节装置。
背景技术
通信与自动控制技术是通信技术与机械技术结合的一种现代技术,可使机械设备实现自动化运行的效果,有利于提高机械设备生产加工的效率。随着通信技术与机械技术的快速发展,越来越多的产品已经实现的自动化生产,但是对于一些需要双面加工的表面质软的橡胶产品,由于其表面质地较软,不易利用机械机构对其表面进行操作。因此该类产品在生产时,则需要工作人员手动对产品进行翻面操作,该橡胶产品的自动化程度不高,翻面操作效率较低。
为解决以上问题,我们提出了一种基于通信技术的橡胶垫自动化翻面调节装置,具备了可对橡胶垫进行自动化翻面操作,橡胶垫翻面效果好,翻面输送效率高的优点,可有效提高橡胶垫的自动化程度,提高橡胶垫生产的效率。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种基于通信技术的橡胶垫自动化翻面调节装置,具备可对橡胶垫进行自动化翻面操作,橡胶垫翻面效果好,翻面输送效率高的优点,解决了现有橡胶垫在进行双面加工时,不易对橡胶垫进行翻面操作,橡胶垫翻面操作不方便,翻面效率不高的问题。
(二)技术方案
为实现上述可对橡胶垫进行自动化翻面操作,橡胶垫翻面效果好,翻面输送效率高的目的,本发明提供如下技术方案:一种基于通信技术的橡胶垫自动化翻面调节装置,包括机体,所述机体的内部设置有传动轴,所述传动轴的表面设置有滚筒,所述滚筒的侧面设置有输入装置,所述滚筒远离输入装置的一侧设置有输出装置,所述传动轴的表面设置有支板,所述支板的内部活动连接有齿杆,所述支板的表面活动连接有主夹杆,所述主夹杆靠近支板的一端设置有齿轮,所述主夹杆远离齿轮的一端设置有夹板,所述支板的表面活动连接有副夹杆,所述齿杆靠近机体的一端活动连接有拉杆,所述机体的内表面设置有固定盘,所述固定盘的内部设置有环形块。
优选的,所述滚筒的表面开设有V形槽。
优选的,所述输入装置位于滚筒转动方向的上表面,输出装置位于滚筒的下部。
优选的,所述支板有两个,对称分布在滚筒的两侧,与滚筒表面的V形槽相对应。
优选的,所述齿杆采用双齿面设计,齿轮与齿杆的齿面相适配。
优选的,所述副夹杆位于齿杆远离主夹杆的一侧,靠近支板的一端亦设计有半齿面的齿轮,与齿杆表面的齿面相适配,远离支板的一端亦设计有夹板,与主夹杆表面的夹板相对应,副夹杆位于滚筒表面V形槽的内部。
优选的,所述拉杆与齿杆之间为活动连接,与支板之间设计有缓冲件,拉杆远离齿杆的一端设计有球形块。
优选的,所述固定盘有两个,对称分布在滚筒的两侧,与机体之间均为固定连接,表面开设有环形滑槽。
优选的,所述环形块靠近机体一侧的表面采用上下坡面设计,拉杆位于固定盘表面环形滑槽的内部,与环形块的表面相适配。
(三)有益效果
与现有技术相比,本发明提供了一种基于通信技术的橡胶垫自动化翻面调节装置,具备以下有益效果:
1、该基于通信技术的橡胶垫自动化翻面调节装置,通过传动轴与滚筒和支板的配合使用,环形块与拉杆的配合使用,齿杆与齿轮的配合使用,主夹杆与副夹杆的配合使用,夹板与滚筒的配合使用,可对橡胶垫进行自动化翻面夹送操作,橡胶垫翻面效果好。
2、该基于通信技术的橡胶垫自动化翻面调节装置,通过滚筒与输入装置和输出装置的配合使用,夹板与滚筒的配合使用,可对橡胶垫进行连续自动化翻面输送操作,无需对橡胶垫进行原位置停止翻面,可有效提高橡胶垫翻面输送的效率,有利于提高橡胶垫生产加工的效率。
附图说明
图1为本发明俯视结构示意图一;
图2为本发明图1中A处结构示意图;
图3为本发明图1中B处结构示意图;
图4为本发明俯视结构示意图二;
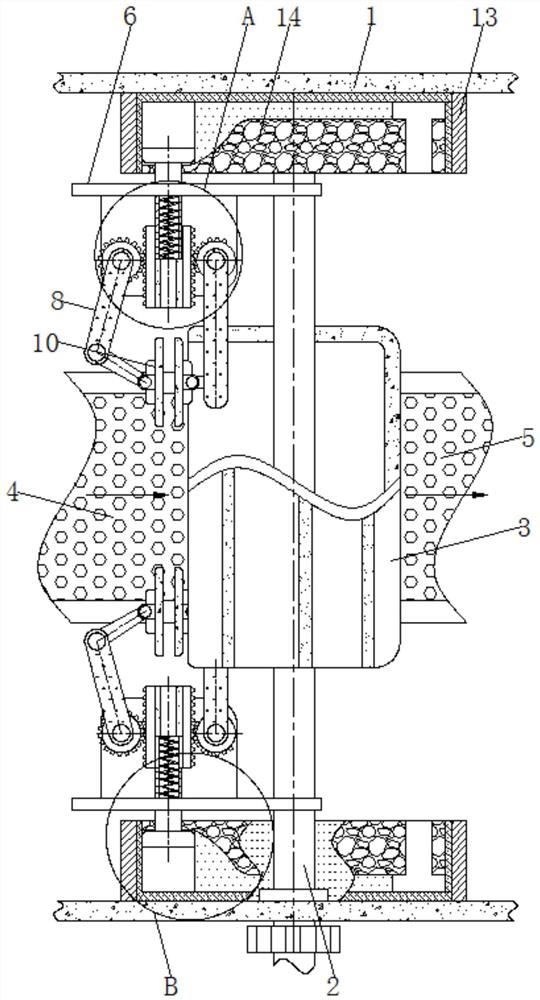
图5为本发明主视结构示意图;
图6为本发明固定盘内部结构示意图。
图中:1、机体;2、传动轴;3、滚筒;4、输入装置;5、输出装置;6、支板;7、齿杆;8、主夹杆;9、齿轮;10、夹板;11、副夹杆;12、拉杆;13、固定盘;14、环形块;
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-6,一种基于通信技术的橡胶垫自动化翻面调节装置,包括机体1,机体1的内部设置有传动轴2,用于带动滚筒3和支板6转动,传动轴2的表面设置有滚筒3,滚筒3的表面开设有V形槽,用于对橡胶垫进行翻面输送,滚筒3的侧面设置有输入装置4,输入装置4位于滚筒3转动方向的上表面,用于将橡胶垫输送到滚筒3的表面,滚筒3远离输入装置4的一侧设置有输出装置5,输出装置5位于滚筒3的下部,用于橡胶垫的输送。
传动轴2的表面设置有支板6,支板6有两个,对称分布在滚筒3的两侧,与滚筒3表面的V形槽相对应,用于带动主夹杆8和副夹杆11转动,支板6的内部活动连接有齿杆7,齿杆7采用双齿面设计,与齿轮9啮合,带动齿轮9转动,支板6的表面活动连接有主夹杆8,用于带动夹板10移动,主夹杆8靠近支板6的一端设置有齿轮9,齿轮9与齿杆7的齿面相适配,用于带动主夹杆8和副夹杆11转动,主夹杆8远离齿轮9的一端设置有夹板10,用于对橡胶垫进行夹紧输送。
支板6的表面活动连接有副夹杆11,副夹杆11位于齿杆7远离主夹杆8的一侧,靠近支板6的一端亦设计有半齿面的齿轮9,与齿杆7表面的齿面相适配,远离支板6的一端亦设计有夹板10,与主夹杆8表面的夹板10相对应,副夹杆11位于滚筒3表面V形槽的内部,与主夹杆8配合,对橡胶垫进行夹送,齿杆7靠近机体1的一端活动连接有拉杆12,拉杆12位于固定盘13表面环形滑槽的内部,与环形块14的表面相适配,用于带动齿杆7移动。
机体1的内表面设置有固定盘13,固定盘13有两个,对称分布在滚筒3的两侧,与机体1之间均为固定连接,表面开设有环形滑槽,固定盘13的内部设置有环形块14,环形块14靠近机体1一侧的表面采用上下坡面设计,用于带动拉杆12移动。
工作原理:在对橡胶垫进行生产时,可使用该装置对橡胶垫进行自动化翻面操作输送,具体操作步骤如下:
首先利用输入装置4对橡胶垫进行输送,输入装置4会将橡胶垫输送到滚筒3的上表面,通过相关驱动设备使传动轴2转动,传动轴2会同时带动滚筒3和支板6转动,支板6会带动拉杆12一起转动,拉杆12靠近固定盘13的一端会在环形块14的表面滑动。
当支板6带动主夹杆8和副夹杆11转动到输入装置4的位置时,此时拉杆12在环形块14表面上下坡面的作用下,会向机体1的方向移动,拉杆12会带动齿杆7一起移动,齿杆7通过与齿轮9啮合,带动齿轮9转动,副夹杆11表面的齿轮9会带动副夹杆11小幅度转动,主夹杆8表面的齿轮9回带动主夹杆8向副夹杆11的方向转动,主夹杆8带动夹板10一起转动。
当主夹杆8转动到输入装置4的表面时,会将输入装置4表面的橡胶垫夹紧在主夹杆8与副夹杆11表面夹板10之间,随着传动轴2的转动,主夹杆8和副夹杆11会带动橡胶垫一起转动,橡胶垫的另一端会在滚筒3的表面转动,当主夹杆8和副夹杆11将橡胶垫夹送到输出装置5的位置时,此时橡胶垫的另一端会掉落在输出装置5的表面,同时拉杆12在环形块14和其表面缓冲件的作用下,会向支板6的方向移动,同时带动齿杆7一起移动。
齿杆7反向移动并与齿轮9啮合,相应地,主夹杆8与副夹杆11会反向转动,使其对应表面的两个夹板10相互分离,不再对橡胶垫进行夹紧,橡胶垫即被放置在输出装置5的表面,此时橡胶垫的上下面与其在输入装置4表面时的上下面的位置相反,以此即完成了对橡胶垫的自动化翻面操作。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种基于通信技术的橡胶垫自动化翻面调节装置
- 一种自动翻面定位自动化机械夹具