一种柔性关节结构
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及医疗器械技术领域,具体涉及一种柔性关节结构。
背景技术
目前柔性关节大量应用于微创手术中,一方面主要用于驱动微创手术钳前端的夹头进行各个方向的运动,另一方面主要用于驱动医用内窥镜的摄像头对不同角度的拍摄。现有的柔性关节驱动线需从关节内部走,这样的走线设计减少了关节内部空间,增大了驱动这个关节需要的拉力,加大了对驱动线拉力强度的要求。且上述走线过程每段线都会和单个关节有接触,当柔性关节进行弯曲时,驱动线形成的曲线一个是由多段线段组成的曲线拉线,多线段之间的连接点为折点,折点会导致线段受力不均匀,驱动线的磨损较为严重,并且这个折点也会导致关节弯曲时候很难保证拉线是紧的,降低了整个关节的弯曲强度,使得关节弯曲不自然,不利于手术的进行,且上述情形会造成部分线段拉紧,部分线段松垮,使得整个骨架结构弯曲时不稳定,影响驱动线寿命。
发明内容
有鉴于此,有必要针对现有技术中存在的问题,提供一种柔性关节结构。
本发明的柔性关节结构,包括骨架结构、包裹在骨架结构外层的柔性调节层、与柔性调节层相适配的驱动线;所述骨架结构为在外力作用下进行弯曲及复位运动的部件;所述骨架结构内部设有贯通的容置腔,给驱动线施加外力,在外力的作用下驱动线驱动柔性调节层,从而带动骨架结构完成不同角度的弯曲运动;移除施加于驱动线上的外力,柔性调节层通过自身的回弹力,使得骨架结构完成复位动作。
作为本发明的进一步改进,所述柔性调节层为橡胶导管,所述橡胶导管包裹在骨架结构外层,所述橡胶导管上设有轴向的驱动线通孔,所述驱动线穿过驱动线通孔且一端固定于橡胶导管的一端部。
作为本发明的进一步改进,所述柔性调节层外部包裹有金属编织网,所述金属编制网能够在柔性关节结构进行复位动作时提供回弹力,金属编制网能够在柔性关节结构使用时起到屏蔽信号的作用。
作为本发明的进一步改进,所述骨架结构为柔性管件、弹性部件、串联连接的金属片或若干个关节连接形成的柔性关节。
作为本发明的进一步改进,所述骨架结构为若干个关节连接形成的柔性关节,所述柔性关节为蛇骨关节,蛇骨关节包括蛇骨节与连接节,所述蛇骨节与连接节内对应设有让位槽,所述让位槽用于工作通道以及方便医用内窥镜的走线;所述蛇骨节一端设有一级连接头,另一端设有二级连接头,所述一级连接头设有两个,对称设于蛇骨节上;所述二级连接头设有两个,对称设于蛇骨节上;对应设置的一级连接头的中心连线与对应设置的二级连接头的中心连线相互垂直设置;一级连接头之间通过一级弧段连接,所述一级弧段与连接节形成关节旋转让位间隙;二级连接头之间通过二级弧段连接,所述二级弧段与连接节形成关节旋转让位间隙;所述连接节上部设有一级限位孔和二级限位孔,所述一级限位孔与一级连接头相适配,所述二级限位孔与二级连接头相适配;所述蛇骨节设有至少两个,连接节设有至少两个;所述蛇骨节与连接节间隔设置形成活动连接。
作为本发明的进一步改进,一级限位孔为弧形孔,所述一级限位孔的两端与弧形孔的圆心连线形成的角,其角度>180°。
作为本发明的进一步改进,二级限位孔为弧形孔,所述二级限位孔的两端与弧形孔的圆心连线形成的角,其角度>180°。
作为本发明的进一步改进,所述万向蛇骨关节通过激光切割金属圆管,从而一体成型。
作为本发明的进一步改进,所述蛇骨节为波浪环状,所述蛇骨节一侧设有两个波峰,另一侧设有两个波峰,所述一级连接头和二级连接头均设于波峰处。
作为本发明的进一步改进,所述蛇骨节或连接节上设有开口通道,所述开口通道用于医用内窥镜的走线或调整,所述开口通道通过冲压一级切痕和二级切痕形成。
作为本发明的进一步改进,所述骨架结构为柔性管件,所述柔性管件为柔性管,所述柔性管的管壁上设有让位调节孔。所述让位调节孔的形状为不规则或规则的形状,数量也无特殊要求;能够达到支撑作用,且能够完成弯曲和复位运动即可,即让位调节孔的存在可以为柔性管件的弯曲和复位的提供让位及管件变形的余量空间。
作为本发明的进一步改进,所述的柔性关节结构,所述让位调节孔的数量设有至少两个。
作为本发明的进一步改进,所述的柔性关节结构,所述驱动线设有至少三条。
作为本发明的进一步改进,所述的柔性关节结构,所述弹性部件为弹簧。
作为本发明的进一步改进,所述容置腔的两端设有开口,用于工作通道以及方便医用内窥镜的走线。
作为本发明的进一步改进,所述柔性调节层为橡胶导管,所述橡胶导管包裹在骨架结构外层,所述橡胶导管外表面均匀的设置有至少三道让位凹槽,所述驱动线设于让位凹槽内且一端固定于橡胶导管的一端部,所述柔性调节层外部包裹有金属编织网。
作为本发明的进一步改进,所述柔性调节层为包含有金属网骨架的橡胶导管,所述橡胶导管包裹在骨架结构外层,所述橡胶导管上设有至少三个轴向的驱动线通孔,所述驱动线穿过驱动线通孔且一端固定于橡胶导管的一端部。
作为本发明的进一步改进,所述柔性调节层为金属编织网,所述驱动线设有至少三根,均匀的分布在骨架结构的外侧,驱动线一端固定于骨架结构的一端部,另一端穿过骨架结构另一端部的固定孔,所述金属编织网包裹在骨架结构和驱动线外侧,驱动线通过金属编织网限位在骨架结构的外侧。
本发明与现有技术相比,具有以下优点:
本发明给出了一种新的柔性关节实现方式,降低柔性关节对驱动线拉力强度的要求,减少柔性关节中驱动线的磨损,增加整个柔性关节的弯曲强度,使得柔性关节弯曲运动时更加的流畅,在柔性关节的内部预留更多的空间,从而延长整个关节的使用寿命,且本发明的结构方便组装,能够实现工艺化流程。
本发明中的骨架结构起到主要支撑导向的作用,这个导向主要是指整个柔性关节的弯曲半径。驱动线起到牵引的作用,负责牵引骨架结构向需要运动的方向运动。柔性调节层包裹层起到限位,弹性支撑作用,它可以保证驱动线的位置为均匀分布,拉动牵引线时,也保证了牵引线为连续曲线,使得整个关节弯曲更加顺畅;并且由于骨架结构没有回弹能力,外部包裹一层具有弹性的柔性调节层时,就能给骨架结构提供一定回弹能力,使关节运动顺畅,使用关节时候手感更加顺畅。
本发明中提及的金属编织网能够起到屏蔽信号以及辅助回弹的作用,由于我们的柔性关节内部需要走信号传输的线缆,此时对外部干扰的屏蔽也是需要考虑的,它也能起到屏蔽作用,保证信号稳定传输;并且由于金属编织网有一定的弹性,它也可以起到辅助回弹的作用。
将驱动线设置在柔性调节层即弹性材料,保证整个柔性关节运动时,驱动线是圆滑的曲线,弹性材料内部去填充骨架结构,用骨架结构去很好的控制整个柔性关节的弯曲半径,以及弯曲表现。
附图说明
图1为发明的一种实施方式的结构示意图。
图2为本发明的实施方式之一的分解图。
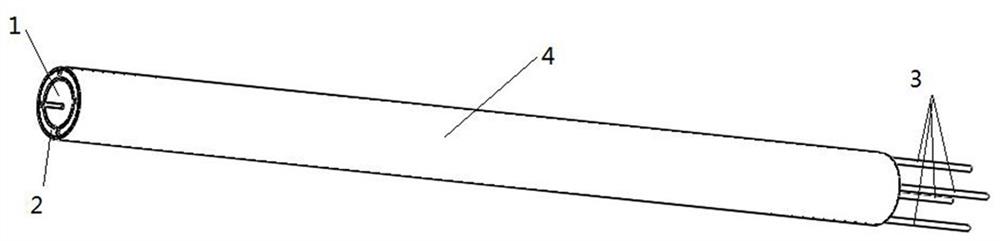
图3为实施例18的示意图。
图4为图3的另一方向视图。
图5为实施例2或实施例17的示意图。
图6为实施例16的示意图。
图7为实施例6的蛇骨关节的示意图。
图8为实施例11的蛇骨关节示意图。
图9为一级连接头的结构示意图。
图10为一级连接头的主视图。
图11为二级连接头的结构示意图。
图中:1-骨架结构,101-端部,102-固定孔,2-柔性调节层,201-驱动线通孔,202-让位凹槽,3-驱动线,4-金属编织网,5-让位调节孔,6-蛇骨节,601-一级连接头,602-二级连接头,603-一级切痕,604-二级切痕,605-开口通道,7-连接节,701-一级限位孔,702-二级限位孔,801-一级弧段,802-二级弧段。
具体实施方式
下面结合附图和实施例对本发明做进一步的解释说明。
实施例1
一种柔性关节结构,包括骨架结构1、包裹在骨架结构1外层的柔性调节层2、与柔性调节层2相适配的驱动线3;骨架结构1为可以在外力作用下进行弯曲及复位运动的部件;骨架结构1内部设有贯通的容置腔,容置腔的两端设有开口,用于工作通道以及方便医用内窥镜的走线;给驱动线3施加外力,在外力的作用下驱动线3驱动柔性调节层2,从而带动骨架结构1完成不同角度的弯曲运动;移除施加于驱动线3上的外力,柔性调节层2通过自身的回弹力,使得骨架结构1完成复位动作。
实施例2
其余与实施例1的方案一致,一种柔性关节结构,包括骨架结构1、包裹在骨架结构1外层的柔性调节层2、设于柔性调节层2内的驱动线3;骨架结构1为可以在外力作用下进行弯曲及复位运动的部件;骨架结构1内部设有贯通的容置腔,容置腔的两端设有开口,用于工作通道以及方便医用内窥镜的走线;给驱动线3施加外力,在外力的作用下驱动线3驱动柔性调节层2,从而带动骨架结构1完成不同角度的弯曲运动;移除施加于驱动线3的外力,柔性调节层2通过自身的回弹力,使得骨架结构1完成复位动作。
实施例3
其余与实施例1或2的方案一致,柔性调节层2为橡胶导管,橡胶导管包裹在骨架结构1外层,橡胶导管上设有轴向的驱动线通孔201,驱动线3穿过驱动线通孔201且一端固定于橡胶导管的一端部。
实施例4
其余与实施例1-3任一项的方案一致,柔性调节层2外部包裹有金属编织网4,金属编制网4能够在柔性关节结构进行复位动作时提供回弹力,金属编制网4能够在柔性关节结构使用时起到屏蔽信号的作用。
实施例5
其余与实施例1-4任一项的方案一致,骨架结构1为柔性管件、弹性部件、串联连接的金属片或若干个关节连接形成的柔性关节。
实施例6
其余与实施例1-5任一项的方案一致,骨架结构1为若干个关节连接形成的柔性关节,柔性关节为蛇骨关节,其中蛇骨关节包括蛇骨节6与连接节7,蛇骨节6与连接节7内对应设有让位槽,让位槽用于工作通道以及方便医用内窥镜的走线;蛇骨节6一端设有一级连接头601,另一端设有二级连接头602,一级连接头601设有两个,对称设于蛇骨节6上;二级连接头602设有两个,对称设于蛇骨节6上;对应设置的一级连接头601的中心连线与对应设置的二级连接头602的中心连线相互垂直设置;一级连接头601之间通过一级弧段801连接,一级弧段801与连接节2形成关节旋转让位间隙;二级连接头602之间通过二级弧段连接802,二级弧段802与连接节7形成关节旋转让位间隙;连接节7上部设有一级限位孔701和二级限位孔702,一级限位孔701与一级连接头601相适配,二级限位孔702与二级连接头602相适配;对应设置的一级限位孔的中心连线与对应设置的二级限位孔的中心连线相互垂直设置且在同一平面,蛇骨节6设有至少两个,连接节7设有至少两个;蛇骨节6与连接节7间隔设置形成活动连接。通过一级弧段与二级弧段的弧度及蛇骨节与连接节的配合限制了蛇骨节的转动角度,所述转动角度为0到30度。
连接节上的两个一级限位孔通过两个三级弧段连接,两个二级限位孔通过两个四级弧段连接,一级弧段、二级弧段、三级弧段、四级弧段均为切面,当蛇骨关节运动时,蛇骨节及连接节相对旋转运动,上述旋转运动到极限时,一级弧段与三级弧段的切面贴合,或二级弧段与四级弧段的切面贴合。
实施例7
其余与实施例6的方案一致,一级限位孔701为弧形孔,一级限位孔701的两端与弧形孔的圆心连线形成的角,其角度>180°。
实施例8
其余与实施例6或7的方案一致,二级限位孔702为弧形孔,二级限位孔702的两端与弧形孔的圆心连线形成的角,其角度>180°。
实施例9
其余与实施例6-8任一的方案一致,万向蛇骨关节通过激光切割金属圆管,从而一体成型。
实施例10
其余与实施例6-9任一的方案一致,蛇骨节6为波浪环状,蛇骨节一侧设有两个波峰,另一侧设有两个波峰,一级连接头601和二级连接头602均设于波峰处。
实施例11
其余与实施例6-10任一的方案一致,蛇骨节6或连接节7上设有开口通道605,开口通道605用于医用内窥镜的走线或调整,开口通道605通过冲压一级切痕603和二级切痕604形成。
实施例12
其余与实施例5-11任一的方案一致,骨架结构1为柔性管件,柔性管件为柔性管,柔性管的管壁上设有让位调节孔5。让位调节孔5的形状为不规则或规则的形状,数量也无特殊要求;能够达到支撑作用,且能够完成弯曲和复位运动即可。
实施例13
其余与实施例12的方案一致,让位调节孔5的数量设有至少两个;
实施例14
其余与实施例1-13任一的方案一致,驱动线3设有至少三条;
控制整个柔性关节需要三个点或者三个以上的点去控制,本专利中部分附图选择四个点去说明,但不表示本申请的控制必须是四条驱动线或需要至少四个点进行控制,可以是三个点的三根线驱动,也可以是5个点的5根线驱动。
实施例15
其余与实施例5的方案一致,弹性部件为弹簧。
实施例16
其余与实施例1的方案一致,柔性调节层2为橡胶导管,橡胶导管包裹在骨架结构1外层,橡胶导管外表面均匀的设置有至少三道让位凹槽202,驱动线3设于让位凹槽202内且一端固定于橡胶导管的一端部,柔性调节层2外部包裹有金属编织网4。
实施例17
其余与实施例1的方案一致,柔性调节层2为包含有金属网骨架的橡胶导管,橡胶导管包裹在骨架结构1外层,橡胶导管上设有至少三个轴向的驱动线通孔201,驱动线3穿过驱动线通孔201且一端固定于橡胶导管的一端部。
实施例18
其余与实施例的方案一致,柔性调节层2即为金属编织网4,驱动线3设有至少三根,均匀的分布在骨架结构1的外侧,驱动线3一端固定于骨架结构1的一端部101,另一端穿过骨架结构1另一端部的固定孔102。金属编织网4包裹在骨架结构1和驱动线3外侧,驱动线3通过金属编织网4限位在骨架结构1的外侧。
以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种柔性关节及采用该柔性关节的微型机器人
- 一种基于递阶结构MPC的多自由度柔性关节机械臂系统的控制方法