基于毫米波雷达的生命体征检测与身份识别系统和方法
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及生命体征检测识别技术领域,尤其是涉及一种基于毫米波雷达的生命体征检测与身份识别系统和方法。
背景技术
随着科技水平的发展与提高,智能生活、智能家居、智能医疗等多种领域的技术需求也日趋强烈。当前的生命体征如呼吸心跳检测技术主要依赖于传统的接触式传感器来实现,如专利CN201811523766.2,但是该专利中的接触式传感器不仅佩戴程序繁琐,移动不方便,长时间佩戴还会带来不适感,无法实现全天时的连续监护。
非接触式的生命体征检测设备不仅能实时监测人的健康状态,也可以应用在安防监控领域,用来实现人员检测和身份识别。目前安防监控领域比较常见的监控技术是光学图像摄像头,但摄像头的监控效果受光照、烟尘、遮挡等环境影响较大,在有遮挡物的情况下,很容易失去安防监控作用。
基于呼吸心跳等生命体征的身份识别是一种非接触式的生物特征识别技术,主要通过提取人与人之间的呼吸运动特征以达到身份识别的目的。目前常用的身份识别技术包括如专利CN201910431503.7所述的指纹识别,如专利CN201811250425.2所述的人脸识别等。但是人脸识别容易受光照烟尘遮挡影响,且人脸识别和指纹识别均有隐私泄露的隐患,造成信息泄漏,引发信息安全等问题。
因此,提升身份识别技术的实用性、普适性和隐私保护能力是目前亟待解决的问题。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种实用性、普适性和隐私保护能力高的基于毫米波雷达的生命体征检测与身份识别系统和方法。
本发明的目的可以通过以下技术方案来实现:
一种基于毫米波雷达的生命体征检测与身份识别系统,包括相互通信连接的毫米波雷达子系统、雷达数据预处理子系统、生命体征特征数据库子系统、身份识别子系统和智能交互界面子系统;
所述的毫米波雷达子系统放置于待测对象旁,包括发射天线和接收天线,用于发射线性调频连续波信号,采集作用在静止的人体胸腔表面反射的雷达回波,并得到原始雷达数据;
所述的雷达数据预处理子系统分解原始雷达数据中的呼吸信号和心跳信号,并提取生命体征特征信息;
所述的生命体征特征数据库子系统用于存储多个个体的身份信息及其对应的生命体征特征信息;
所述的身份识别子系统学习生命体征特征信息,进行分类并确定对应的身份信息;
所述的智能交互界面子系统包括显示屏,用于实时显示待测对象的生命体征信息和身份识别结果。
进一步地,所述的毫米波雷达子系统的发射天线向检测范围内的区域发射线性调频连续波信号,并用接收天线接收由静止的人体胸腔表面反射的雷达回波,将接收到的雷达回波与发射信号进行混频后通过低通滤波,再经过模数转换后得到原始雷达数据,所述的原始雷达数据包含生命体征信息和多种噪声。
进一步地,所述的雷达数据预处理子系统采用平滑滤波算法、带通滤波算法和/或改进经验模态分解算法,对原始雷达数据信号进行分解,得到呼吸信号波形和心跳信号波形。
更进一步地,所述的雷达数据预处理子系统分解原始雷达数据中的呼吸信号和心跳信号时,具体包括以下步骤:
1)选取原始雷达数据中某一调频周期的信号,并进行快速傅里叶变换,得到目标距离分布;
2)根据目标距离分布进行目标点检测,提取出目标点雷达数据,所述的目标点雷达数据为包含胸腔运动的数据;
3)对目标点雷达数据进行去毛刺处理;
4)对原始雷达数据信号进行分解,得到呼吸信号波形和心跳信号波形。
进一步地,所述的雷达数据预处理子系统结合频谱插值法和信号寻峰算法,首先从呼吸信号波形和心跳信号波形中提取呼吸率和心率,再结合呼吸信号波形、心跳信号波形、呼吸率和心率,提取得到多个生命体征特征信息。
进一步地,所述的生命体征特征信息包括:
呼吸振幅、呼吸频率、呼吸波峰间时间间隔、呼吸波谷间时间间隔、波峰到波谷的欧式距离、波峰到波谷的时间、波峰到波谷的速度、波谷到波峰的距离、波谷到波峰的时间、波谷到波峰的速度、潮气量、心跳振幅和心跳频率。
更进一步地,所述的平滑滤波算法用于得到接近真实呼吸运动的呼吸信号,其通过滑动窗口计算每一个窗口内的高斯加权平均值,得到呼吸信号随时间变化的平滑值,所述的滑动窗口的范围设置为~;
所述的带通滤波算法用于从呼吸心跳叠加的原始雷达数据信号中分离出心跳信号,所述的带通滤波算法采用椭圆带通滤波器,且通带频段设置为.Hz~Hz,阻带频率设置为.~Hz,通带和阻带允许的最大衰减分别设置为dB和dB;
所述的改进经验模态分解算法用于对呼吸心跳叠加信号进行分解,分别得到呼吸信号和心跳信号。
更进一步地,所述的频谱插值法首先对呼吸信号和心跳信号进行短时傅里叶变换,得到离散的频谱值,然后找到频谱值的峰值,对其做三点二次频谱插值,找到峰值对应的频率,得到呼吸率和心率;
所述的信号寻峰算法根据心率和呼吸率的范围设置波峰间的最小间隔数,再根据提取出的呼吸和心跳幅值设置最小峰值数。
进一步地,所述的身份识别子系统将不同个体的多种生命体征特征信息进行离线或在线训练,生成分类模型,然后利用分类模型进行身份识别;
所述的身份识别子系统在收集到设定数量的已有身份信息个体或新个体的数据后,进行分类模型的在线更新或替换;
所述的分类模型包括卷积神经网络、长短期记忆网络、最邻近节点算法和/或k均值算法。
一种如所述的基于毫米波雷达的生命体征检测与身份识别系统的身份识别方法,包括以下步骤:
S1:毫米波雷达向检测区域范围内发射线性调频连续波信号,并采集作用在静止的人体胸腔表面反射回来的雷达回波,然后将接收到的雷达回波与发射波形进行混频后低通滤波,经过模数转换后得到原始雷达数据;
S2:对原始雷达数据进行快速傅里叶变换,利用动目标显示算法滤除静态目标回波,得到包含人体呼吸和心跳运动信息的体征点相位信号,再对相位信号进行滤波处理,得到被测对象的呼吸信号波形和心跳信号波形,再从呼吸信号波形和心跳信号波形中得到呼吸率和心率;
S3:对呼吸信号波形和心跳信号波形进行时域和频域的数据处理,提取生命体征特征信息,构建生命体征特征数据库;
S4:将多个个体的生命体征特征信息进行离线或在线训练,生成分类模型,并利用分类模型对生命体征特征信息进行分类识别,得到身份信息;
S5:在显示屏上实时更新显示被测对象的生命体征信息和被测对象的身份信息。
与现有技术相比,本发明具有以下优点:
1)本发明通过呼吸运动特征实现身份识别,不易被伪造,并且能够实现非接触式的、远距离的识别,也不会造成隐私泄露问题,实现舒适的、灵活的全天时生命体征监护,安全性高;
2)本发明采用非接触检测,无需佩戴设备,可全天时检测,且利用毫米波雷达进行检测,感知距离远,移动方便,灵活性好,受环境影响程度低,可以在充满挑战的环境下,比如无光照、有烟雾以及有非金属遮挡物的环境下工作,实用性和普适性高;
3)本发明毫米波雷达进行信号采集,隐蔽性高,不易被发现、被破坏,且采用低功率毫米波,对人体无害,安全可靠。
附图说明
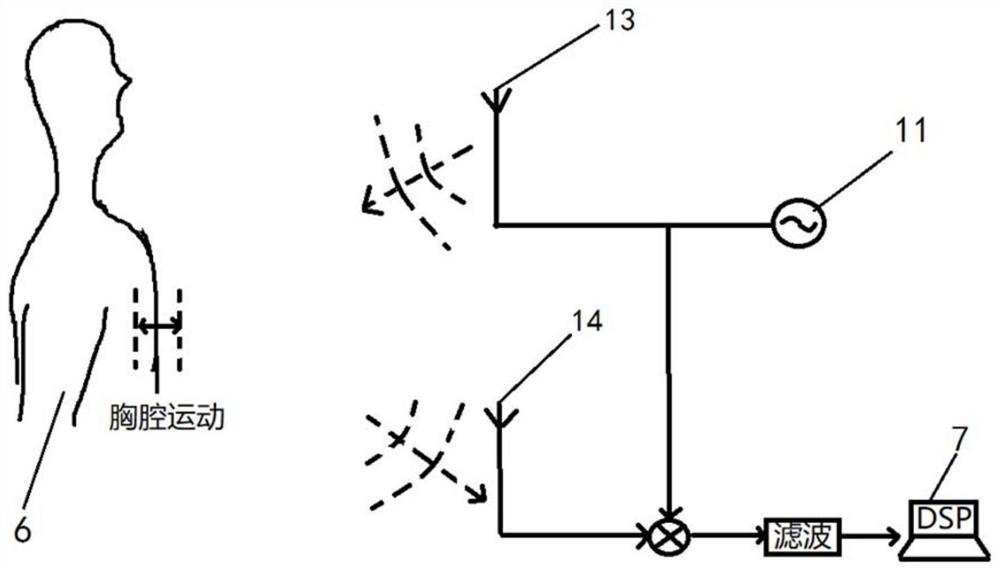
图1为本发明结构和实施例中的应用场景示意图;
图2为本发明实施例中呼吸信号的检测结果图;
图3为本发明实施例中心跳信号的检测结果图;
图4为本发明实施例中呼吸信号波形的波峰波谷示意图;
图5为本发明频域插值算法示意图;
图6为本发明原始雷达数据信号预处理流程图;
图7为本发明实系统的工作流程示意图。
其中,1、毫米波雷达子系统,11、电源组件,13、发射天线,14、接收天线,2、雷达数据预处理子系统,3、生命体征特征数据库子系统,4、身份识别子系统,5、交互显示子系统,6、待测对象,7、计算机。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
实施例
本发明公开了一种基于毫米波雷达的生命体征检测与身份识别系统,利用个体不同的呼吸模式进行身份识别,法国格勒诺布尔大学医院中心的研究人员吉拉·贝肯特里特的研究表明,不同的个体的呼吸模式有很大不同,呼吸模式是成年人的一项相对稳定的特征,不同的人的呼吸模式在潮气量、呼吸频率和气流形状等方面都有很大的不同。
如图1和图7所示,该系统包括相互通信连接的毫米波雷达子系统1、雷达数据预处理子系统2、生命体征特征数据库子系统3、身份识别子系统4和智能交互界面子系统5。
其中,毫米波雷达子系统1的硬件部分包括发射天线13、接收天线14、雷达射频前端、晶振、通信组件、模数转换器、微控制单元(MCU)、电源组件11和外围配套电路;雷达数据预处理子系统2的硬件部分包括MCU、数字信号处理器(DSP)、现场可编程门阵列(PGA)、智能手机和计算机等具有一定信号处理能力的装置;生命体征特征数据库子系统3的硬件部分应有数据存储功能,包括机械硬盘和固态硬盘等;身份识别子系统4的硬件部分包括嵌入式设备、智能手机、计算机、服务器以及其他具有机器学习和深度学习支持的设备;交互显示子系统5的硬件部分应有显示屏,能够实现人机交互功能。各个子系统间应具备接口等硬件设施,能够实现子系统间的通信和数据传输功能。
如图1所示,毫米波雷达子系统1放置于待测对象6旁,发射天线13发射线性调频连续波信号,接收天线14采集作用在静止的人体胸腔表面反射的雷达回波,得到原始雷达数据;雷达数据预处理子系统2分解原始雷达数据中的呼吸信号和心跳信号,并提取生命体征特征信息;生命体征特征数据库子系统3用于存储多个个体的身份信息及其对应的生命体征特征信息;身份识别子系统4学习生命体征特征信息,进行分类并确定对应的身份信息;智能交互界面子系统5包括显示屏,用于实时显示待测对象的生命体征信息和身份识别结果。
具体地,毫米波雷达子系统1发射线性调频连续波信号,并采集作用在静止的人体胸腔表面反射的雷达回波,混频后低通滤波,经过模数转换后得到含有生命体征信息和多种噪声的原始雷达数据。
毫米波雷达子系统1根据应用场景的不同,所需的雷达工作参数也不同,可以根据应用场景的需求调整系统的最大测量距离、最大测量速度、距离分辨率、速度分辨率、帧周期等参数。上述系统参数由以下雷达参数确定:雷达发射线性调频连续波信号的天线数、雷达接收回波信号的天线数、每帧调频周期数、调频斜率、调频周期、模数转换采样率、每调频周期采样点数。
毫米波雷达子系统1获取原始雷达信号的主要过程为:毫米波雷达的M个发射天线向检测范围内的区域发射线性调频连续波信号,并用N个接收天线接收由静止的人体胸腔表面反射的雷达回波,将接收到的雷达回波与发射信号进行混频后低通滤波,再经过模数转换后得到含有生命体征信息和多种噪声的原始雷达数据。
雷达数据预处理子系统2能够对原始雷达数据做数字信号处理,提取包含测试对象的呼吸、心跳波形和速率,以及生命体征特征信息,主要包括对原始雷达信号进行数字信号处理以提取个体呼吸心跳信息和对提取到的呼吸心跳信息进行特征提取两大步骤。
具体地,雷达数据预处理子系统2中提取个体呼吸心跳信息的过程如下:
1、雷达采集到的每一帧原始雷达数据大小为m*n,其中m表示调频周期索引,n表示调频周期采样点数,对某一调频周期的信号做快速傅里叶变换(FFT),可以得到目标距离分布。
2、得到目标距离分布后,需要进行目标检测,对目标距离分布数据进行阈值检测,筛选出目标距离点,提取出目标点对应的雷达数据,即为包含胸腔运动的数据。
3、得到人体体征数据后,对比每一数据点与前后数据点的插值,插值过大时进行纠正,达到去除数据中包含的尖锐毛刺杂波的效果,也可以采用中值滤波算法对突出的毛刺去除,以避免受到错误数据的影响。
对数据纠正的可采用如下方法:
假设原数据为f(x),对f(x)做恒虚警率(Constant False Alarm Rate,CFAR)检测,当检测到f(a)时,判断f(a-1)和f(a+1)是否为目标,不是目标时,令h(a)=k×f(a),k为衰减因子,结合毛刺与非噪声信号的关系,k取0.4~0.6。将单个目标点纠正完毕后,进行第二轮纠正,当检测到第一个f(a)时,判断f(a-1)、f(a+1)与f(a)的关系,f(a)呈上升趋势时,令h(a)=f(a-1)+m,f(a)呈下降趋势时,令h(a)=f(a-1)+m,结合毛刺与非噪声信号的关系,m的取值范围为0.1~0.3。
数据纠正去除毛刺的另一种方法为中值滤波,假设原数据为f(x),索引a对应的中值滤波后的值为:
4、利用平滑滤波、带通滤波或改进经验模态分解(MEEMD)等算法分离提取呼吸和心跳信号,其中:
(1)平滑滤波算法是得到更接近真实呼吸运动的呼吸信号的有效方法,算法内容是滑动窗口计算每一个窗口内的高斯加权平均值,得到随时间变化的平滑值。高斯加权使用的是高斯函数,即正态分布函数,其概率密度函数为:
其中σ为标准差。
当求索引为a时,μ为a,f(x)为索引值x的值对应的权值,当窗口为2n+1时,高斯平滑后a处对应的值可由下式计算:
因为2n+1个点的权重之和不为1,因此需要归一化:
I(a)为高斯平滑后的值,针对呼吸信号,窗口范围一般设置为80~120,当a-n或a+n不存在时,需要补0。
(2)带通滤波算法是从呼吸心跳叠加信号中分离出准确的心跳信号的方法,算法内容是设置一个带通滤波器的通带和阻带频段,令数据中特定频段的信号通过而抑制其他频段的信号,带通滤波器包含无限冲激响应滤波器(Infinite Impulse Response,IIR)和有限冲激响应滤波器(Finite Impulse Response,FIR),无限冲激响应滤波器中的椭圆滤波器带内波动小,过渡带窄,是性能较好的带通滤波器,采用椭圆带通滤波器,得到心跳信号,通带频段一般设置为0.6Hz~2Hz,阻带频率设置为0.55~3Hz,通带、阻带允许的最大衰减分别设置为3dB和40dB。
(3)改进经验模态分解算法(MEEMD)可以对呼吸心跳叠加信号进行分解,以得到呼吸和心跳信号,MEEMD可以有效抑制模态混叠,分解结果不会产生多余的虚假分量和伪分量,与实际信号吻合较好,分解效果较好。
对于非平稳信号S(t),MEEMD的分解过程如下:
在原始信号S(t)中,分别添加均值为0的白噪声信号n
其中n
检查S
对剩余信号r(t)进行EMD分解,根据频率的高低对信号分量进行排列。
另外,除了以上三种效果较好的信号提取、分解算法外,傅里叶变换、小波变换等时频分析算法也可以用来进行信号分解。
5、从呼吸和心跳信号中提取呼吸率和心率,该步骤有两种实现方法,分别是频谱插值法和信号寻峰算法,两种方法互相监督,互相参考,其中:
(1)频谱插值法是通过分析和计算信号的频域特征,以得到呼吸率和心率。首先对信号进行短时傅里叶变换(STFT),得到离散的频谱值,找到频谱值的峰值,对其做三点二次频谱插值。假设峰值所在频率为f
可以找到峰值对应的频率为f
(2)信号寻峰算法是通过分析和计算信号的时域特征,以得到呼吸率和心率。根据心率和呼吸率的范围设置波峰间的最小间隔数,根据提取出的呼吸和心跳幅值设置最小峰值数。正常成年人在静息状态下的呼吸频率约为12~20次/分钟,女性较男性稍快1~2次/分钟,儿童约为20次/分钟;成人在静息状态下的心跳次数约为60~100次/分钟。因此呼吸率的范围为0.15~0.35Hz,心率的范围为0.85~2Hz。
雷达数据预处理子系统1中提取的生命体征特征信息包括多种随时间变化的变量,变量包括:呼吸振幅、呼吸频率、呼吸波峰间时间间隔、呼吸波谷间时间间隔、波峰到波谷的欧式距离、波峰到波谷的时间、波峰到波谷的速度、波谷到波峰的距离、波谷到波峰的时间、波谷到波峰的速度、潮气量、心跳振幅和心跳频率。各变量的定义如下:
呼吸振幅:呼吸波形的振幅;
呼吸频率:每分钟的呼吸次数;
呼吸波峰间时间间隔和波谷间时间间隔:假设呼吸信号中包含一个波峰和一个波谷的第n个周期内,振幅最大值为A
波峰到波谷的欧式距离为:
波谷到波峰的欧氏距离为:
波峰到波谷的时间为:
|t
波谷到波峰的时间为:
|t
波峰到波谷的速度为:
波谷到波峰的速度为:
潮气量:指每次呼吸时吸入或呼气的气体量,在呼吸波形中可表示为积分形式。
心跳振幅:心跳波形的振幅。
心跳频率:每分钟的心跳次数。
也可在这些特征的基础上进一步估计个体在呼吸波峰波谷之间的联系差异,包括但不限于包含的时间、空间、功率谱密度等信息。
生命体征特征数据库子系统3存储提取到的生命体征特征数据集,具体为存储多个个体身份和其对应的多种生命体征特征。
身份识别子系统4的作用是学习生命体征特征信息,进行分类和判决,确定身份信息,其将不同人的多种生命体征特征数据进行离线或在线训练生成分类模型,然后利用模型进行身份识别,在收集到一定量已有身份信息个体或新个体的数据后,进行分类模型的在线更新或替换,分类模型包括但不限于:卷积神经网络(CNN),长短期记忆网络(LSTM),最邻近节点算法(KNN)和k均值算法(KMN)。
交互显示子系统5用于在显示屏上实时更新显示测试对象的呼吸心跳波形、速率信息和测试对象的身份识别结果,具体为,在显示屏上实时更新显示实验对象的呼吸心跳波形、速率信息和实验对象的身份信息。
如图7所示,本发明还给出一种基于毫米波雷达的生命体征检测与身份识别系统的身份识别方法,包括以下步骤:
S1:毫米波雷达向检测区域范围内发射线性调频连续波信号,并采集作用在静止的人体胸腔表面反射回来的雷达回波,然后将接收到的雷达回波与发射波形进行混频后低通滤波,经过模数转换后得到原始雷达数据;
S2:对原始雷达数据进行快速傅里叶变换,利用动目标显示算法滤除静态目标回波,得到包含人体呼吸和心跳运动信息的体征点相位信号,再对相位信号进行滤波处理,得到被测对象的呼吸信号波形和心跳信号波形,再从呼吸信号波形和心跳信号波形中进行寻峰或频域的处理得到呼吸率和心率;
S3:对呼吸信号波形和心跳信号波形进行时域和频域的数据处理,提取生命体征特征信息,构建生命体征特征数据库;
S4:将多个个体的生命体征特征信息进行离线或在线训练,生成分类模型,并利用分类模型对生命体征特征信息进行分类识别,得到身份信息;
S5:在显示屏上实时更新显示被测对象的生命体征信息和被测对象的身份信息,具体包括待测多想6的呼吸心跳波形、速率信息和被测对象的身份信息。
下面给出本实施例的具体应用场景,如图1所示,其具体实施过程如下:
(1)在场景中布置毫米波雷达与信号处理集成模块,通过USB数据线连接计算机7,建立起通信并开启雷达;
(2)待测对象6站立或坐在毫米波雷达的检测区域内,保持静止,毫米波雷达探测到人体的胸腔运动,获取包含人体呼吸心跳引起胸腔运动的原始数字中频数据;
(3)在计算机7上对原始数据进行处理,分别利用平滑滤波和带通滤波提取呼吸信号波形和心跳信号波形,采用频域插值算法和时域寻峰算法对呼吸和心跳波形进行处理得到呼吸率和心率,提取的呼吸信号波形和心跳信号波形如图2和图3所示,频域插值算法如图5所示;
(4)重复第(2)步和第(3)步,获取5个人的呼吸波形,进行短时傅里叶变换,得到一维呼吸波形和二维呼吸时频特征图,构建对应的一维和二维生命体征特征数据集,每人100个样本,存储于计算机7上;
(5)在计算机7上分别将一维和二维生命体征特征数据集送入设计好的长短期记忆网络(LSTM)和卷积神经网络(CNN),训练得到多分类模型;
(6)在计算机上调用多分类模型对实时传入的生命体征特征分类实现基于生命体征特征的身份识别,并显示识别到的身份。
本实施例的雷达参数设置包括两个发射天线13和四个接收天线14,调频起始频率为77.666GHz,调频斜率为96.80009,调频周期为300us,每帧调频周期数为64,帧周期为31ms,ADC采样率为3.515MHz,每调频周期ADC采样点数为128,这些参数确定的雷达最大测量距离为5.44m,最大测量速度为3.14m/s,距离分辨率为4.25cm,速度分辨率为9.83cm/s。
本实施例的频域插值算法结构图如图5所示,首先对信号进行短时傅里叶变换(STFT),黑点表示得到的离散的频谱值,找到频谱值的峰值,对其做三点二次频谱插值。假设峰值所在频率为f
本实施例的原始数据信号处理流程如图6所示,首先对采集到的8通道、64个chirp的原始雷达数据进行通道数据筛选,选出受噪声影响最小的1个通道,再对此通道的64个chirp的数据进行相干增强处理,这能够有效提升信噪比,从而提高目标点检测的准确率,然后进行目标点检测,提取目标点的相位和相位差信号,其中相位差信号由相位信号的后一帧减前一帧获得,之后对信号进行去毛刺和去噪处理,然后分别利用平滑滤波和带通滤波获得呼吸信号和心跳信号,最后利用频域插值算法和时域寻峰算法计算呼吸率和心率。
该实施例的系统工作流程图如图7所示,工作流程如下:
首先,在毫米波雷达子系统中启动雷达,发射线性调频连续波信号,并采集作用在静止的人体胸腔表面反射的雷达回波,混频后低通滤波,经过模数转换后得到含有生命体征信息和多种噪声的原始雷达数据,即中频信号;
然后,雷达数据预处理子系统能够对原始雷达数据做数字信号处理,筛选出受噪声影响小的通道信号,多相干增强后做距离快速傅里叶变换,提取包含测试对象的呼吸波形和速率、心跳波形和速率,以及生命体征特征信息;
最后,生命体征特征数据库子系统存储提取到的生命体征特征数据集;身份识别子系统的作用是学习生命体征特征信息,进行分类和判决,确定身份信息;交互显示子系统实现在显示屏上实时更新显示测试对象的呼吸心跳波形、速率信息和测试对象的身份识别结果。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的工作人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 基于毫米波雷达的生命体征检测与身份识别系统和方法
- 一种基于毫米波雷达的生命体征检测方法