一种上肢康复锻炼助力系统
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及康复锻炼助力器械技术领域,尤其涉及一种上肢康复锻炼助力系统。
背景技术
上肢康复锻炼助力系统通过驱动机构例如电机来带动肩关节、肘关节和腕关节的运动,可应用于医疗康复中进行人体上肢的康复治疗,也可协助人工进行货物的装卸,其应用越来越广泛。
现有的上肢康复锻炼助力系统的大臂、小臂和手部分别通过不同的电机来带动,使得上肢助力系统的控制比较复杂,并且多个电机使得上肢助力系统的重量较大,同时由于目前的上肢外骨骼康复器械体积庞大、成本高昂、穿戴繁琐、柔性适应度差,很难再普通民众中得到应用,因此急需一种结构紧凑、低成本、功能全面、穿戴便捷舒适的上肢康复器械。
发明内容
本发明提供一种上肢康复锻炼助力系统,以解决相关技术中的不足。
本发明一种上肢康复锻炼助力系统,包括支撑架系统、手臂系统、控制系统。
所述的支撑架系统包括可自由升降的双节连杆系统、可升降式万向轮复合底盘、多自由度旋转平台系统。
所述的万向轮底盘由若干个可锁紧的万向轮和辐射型支架组成,可实现任意方向的移动和停止。所述的升降式配重盘由固定在自由升降支撑架外层套管上的连杆系统实现配重盘的下落与抬起,配重盘的底部采用带纹路的橡胶类材质及吸盘,带当配重盘降落时其底部与地面接触可以增大接触力,使产品使用时更加稳定。
所述的升降式配重盘的连接杆与升降支撑管的外层套管同轴配合,中间采用两个滑动轴承进行支撑,升降配重盘连杆的顶部采用压缩弹簧与支撑管的外层套管底座连接。
所述升降配重盘升降控制连杆系统由升降控制手柄握杆、联动连杆、固定旋转件、梅花螺钉组成,当手向下按压手柄握杆时,配重盘升起,同时旋转梅花螺钉,使其将升降盘上的同轴连杆进行固定。通过上下搬动升升降控制手柄握杆,实现升降配重盘的升降。
所述升降支撑杆的内管顶部具有多方向旋转平台,在X、Y、Z的旋转方位处侧面均有角度指示标识,可通过梅花螺钉实现旋转平台,X向和Y向的0~180°以及绕Z轴0~360°的无级调节能力,从而可以应对不同体位和不同的使用环境。
所述的旋转平台上方具有X向和Y向的梅花丝杠和螺母机构,在梅花丝杠上配合有对应的丝杠滑块,丝杠滑块的底部与丝杠连接,顶部与控制器壳体的底部铝合金支撑板连接,通过对X向和Y向的梅花丝杠的手动正旋或逆旋,带动控制器底板台一起前进和后退,以更好的应对不同使用者的体位。
所述升降支撑杆的外层套管上采用梅花旋钮进行升降内管的固定,所述的梅花旋钮固定在升降支撑杆的外管上,所述的升降内管上有多列对应旋钮螺钉的凹坑,通过旋转梅花旋钮可以实现梅花旋钮螺柱的旋进和旋出,当旋进时,旋钮螺柱会顶在对应的凹坑中,实现升降内管的稳定固定以及更小的升降间距。
所述手臂系统包括大臂、小臂和手部,所述的大臂和小臂均为可伸缩的双层套管,通过正向和反向旋转伸缩固定帽,可实现双层套管的自由伸缩和任意位置的固定。所述大臂的肩关节通过多自由度可活动柔性关节与肩关节驱动电机的输出轴进行连接,所述大臂管内管中安装有行星齿轮减速电机,所述的电机输出轴连接有蜗杆,蜗杆靠近电机一端通过轴承同轴固定在大臂的内管中,并从大臂内管的肘部端口处伸出,大臂内管在肘关节处有圆形凸起,并设有安装推力轴承的凹槽。所述的小臂肘关节处安装有与蜗杆配合的蜗轮,在所述的蜗轮上同样设有安装推力轴承的凹槽,推力轴承的左端半嵌入在大臂内管上的推力轴承的凹槽内,右端半嵌入在小臂内管蜗轮上的推力轴承凹槽内,大臂的内管与小臂的内管在肘关节位置处,通过销轴与卡簧进行同轴固定。
所述的的肩关节驱动电机与控制系统的金属底板集中在一起。
所述的肩部柔性关节由大臂管、上下压缩弹簧、弹簧限位柱、大臂管密封橡胶头、120°均布三个压缩弹簧、柔性肩部外壳、螺钉等部件组成。所述的柔性肩部外壳外部外类三角形状,其内部与大臂管外管外侧的同轴环之间连接有三个120°均布的压缩弹簧,在大臂外管的同轴环的上下两侧各有一个压缩弹簧,大臂外管的同轴环中部有上下压缩弹簧的限位螺柱。同时大臂外管的上下弹簧的两个远端各有一个弹簧限位固定柱,使弹簧初始位置具有一定的预压缩量,并保持相对稳定的位置。
所述的柔性肩部外壳上开设有贯穿的螺钉孔,可通过该螺钉孔将柔性肩部外壳方便的固定在肩关节电机的输出轴连接的万能接头上,实现整套肩部系统的快速拆装与维修。
所述的大臂的中部有承载人体大臂的C型支撑架,所述的C型支撑架分为旋转C型支撑架和平移C型支撑架两个部分。所述的平移C型支撑架的外侧通过滑动导杆、压缩弹簧与易拆连接件进行连接,所述的易拆连接件通过拆装握柄的旋紧和放松使其牢牢固定在大臂管或打开任意调整其在大臂管上的位置。所述的压缩弹簧布置在易拆连接件的上下两侧,C型支撑架在受到外力作用时,可沿大臂的轴向进行被动滑移,以达到最佳的穿戴舒适度。所述的旋转C型支撑架和平移C型支撑架上均安装有若干个磁铁,并且其相对面的磁性相异,当穿戴完毕后直接扣合旋转C型支撑架,两个支撑架上的磁铁由于异性相吸的原理紧紧的扣合在一起,实现对手臂的固定。所述的两个分半的C型支撑架的内侧第一层为柔性泡棉层通过双面胶与C型架的内表面固定,第二层为柔性充气层,其外表面为纤维织物层,内芯为多段串联式气囊,气囊的进气口与放气口为同一口,统一名称为气囊接口,在气囊接口处通过硅胶软管与接头一路连接至微型气动电磁阀,另一路连接气压传感器,最后一路与小臂上的气囊口进行连接。微型气动电磁阀通过硅胶软管与气泵的出气口连接。气泵与其驱动器连接,所述的气泵驱动器和气压检测传感器的信号线与控制器连接,可实现充气压力的自动检测,既能保证穿戴的舒适性,又能保证对人体大臂的安全固定。
所述的小臂为可伸缩的双层套管,通过正向和反向旋转伸缩固定帽,可实现双层套管的自由伸缩和任意位置的固定。所述的小臂肘关节位置安装有与蜗杆配合的蜗轮,在肘关节的对应位置有指示肘关节当前角度的角度盘。所述的小臂手腕部分安装有可沿小臂管轴向滑动的手部握柄。
所述的蜗轮与小臂肘部通过连接件固定,蜗杆与蜗轮实现配合安装,通过电机带动蜗杆旋转,进而带动蜗轮转动,实现小臂关节的转动。在肘关节处安装有角度传感器,可实时检测肘关节的旋转角度,并反馈给控制器。
所述的小臂的中部有承载人体小臂的C型支撑架,所述的C型支撑架分为旋转C型支撑架和平移C型支撑架两个部分。所述的平移C型支撑架的外侧通过滑动导杆、压缩弹簧与易拆连接件进行连接,所述的易拆连接件通过拆装握柄的旋紧和放松使其牢牢固定在小臂管或打开任意调整其在小臂管上的位置。所述的压缩弹簧布置在易拆连接件的上下两侧,C型支撑架在受到外力作用时,可沿小臂的轴向进行被动滑移,以达到最佳的穿戴舒适度。
所述的旋转C型支撑架和平移C型支撑架上均安装有若干个磁铁,并且其相对面的磁性相异,当穿戴完毕后直接扣合旋转C型支撑架,两个支撑架上的磁铁由于异性相吸的原理紧紧的扣合在一起,实现对手臂的固定。
所述的C型支撑架内侧第一层为柔性泡棉层通过双面胶与C型架的内表面固定,第二层为柔性充气层,其外表面为纤维织物层,内芯为多段串联式气囊,气囊的进气口与放气口为同一口,统一名称为气囊接口,其气囊接口通过硅胶软管与大臂上气囊连接的四通接头进行连接,大小臂上的柔性气囊共用一套供气与气压检测系统,降低了系统的复杂性、成本与重量。
所述的小臂的手腕部位的手部握柄,外层为柔性硅胶层,前端通过旋转连接件与小臂外管内部的滑动部件连接,所述小臂外管内的滑动部件的两侧各有一个压缩弹簧,两个压缩弹簧的一端通过滑动部件上的凹槽进行嵌入式连接,另一端通过弹簧固定柱进行限位固定。所述的滑动部件的中部安装有滑动轴承,滑动导向柱穿过滑动轴承与两端的弹簧限位柱进行固定,在所述小臂管的顶端有橡胶密封盖。
所述的控制系统包括肩关节控制与反馈系统、肘关节控制与反馈系统、C型支撑架内多段气囊的充气控制与反馈系统、移动交互操作显示系统、供电系统。所述的肩关节控制与反馈系统包括肩关节驱动电机、同轴角度传感器、肩关节电机驱动器;所述的肘关节控制与反馈系统包括肘关节驱动电机、角度传感器肘关节电机驱动器;所述的移动交互操作显示系统包括数据传输蓝牙模块、平板电脑;所述的多段气囊的充气控制与反馈系统包括气泵、气泵驱动器、气压传感器、气动电磁阀、硅胶管;所述的控制系统信号接收与数据处理的核心为控制板STM32。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。
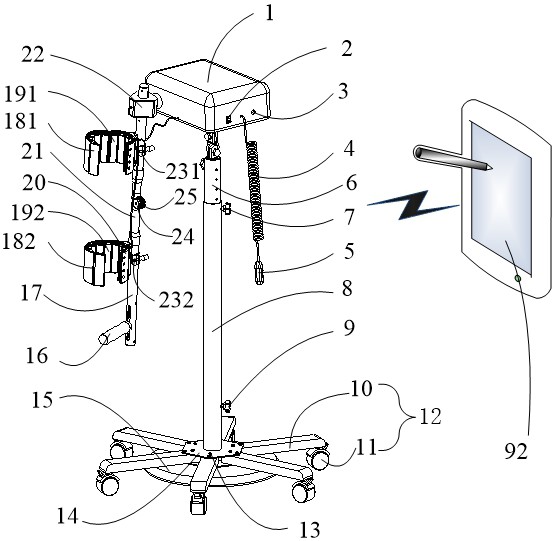
图1是本发明实施例一种上肢康复锻炼助力系统的立体结构图。
图2是图1所示的上肢康复锻炼助力系统的手臂系统的分解立体结构图。
图3是图1所示的上肢助力系统的控制系统详细立体结构图。
图4是图1所示的支撑架系统旋转平移平台的立体分解图。
图5是图1所示的支撑架系统可升降式万向轮复合底盘的立体结构图。
图6是图2所示的手臂系统未分解时的另外一个视角立体结构图。
图7是图2所示的手臂系统的另一个视角的立体结构图。
图8是所述手臂系统肘关节立体分解结构图。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本发明相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致的装置和方法的例子。
图1是本发明实施例一种上肢康复锻炼助力系统的立体结构图;图2是图1所示的上肢康复锻炼助力系统的手臂系统的分解立体结构图;图3是图1所示的上肢助力系统的控制系统详细立体结构图;图4是图1所示的支撑架系统旋转平移平台的立体分解图;图5是图1所示的支撑架系统可升降式万向轮复合底盘的立体结构图;图6是图2所示的手臂系统未分解时的另外一个视角立体结构图;图7是图2所示的手臂系统的另一个视角的立体结构图;图8是所述手臂系统肘关节立体分解结构图。
结合附图1-图8,对本发明进行详细的介绍。
本发明实施例提供的上肢康复锻炼助力系统包括支撑架系统、手臂系统和控制系统。
所述的支撑架系统包括可自由升降的双节连杆系统、可升降式万向轮复合底盘、多自由度旋转平台系统。
所述的可自由升降的双节连杆系统由固定外管8、升降内管6组成。所述的外管8的中下部有升降配重盘固定的梅花旋钮9,底部连接有支撑架底部固定盘14。所述的外管8的上部具有内管6升降锁紧的梅花旋钮7,在内管6上沿轴向布置有多列间距不同的凹槽46,当升降内管6被升降到指定高度时,向右旋转梅花旋钮7,使梅花旋钮7的螺柱刚好旋进升降内管6的凹槽中,实现升降内管6径向和轴向的双重固定。所述的升降内管6上布置的多列不同间距交错布置的的凹槽可以实现类无级调节高度的能力。
所述的可升降式的万向轮复合底盘包括万向移动轮系统和配重盘升降系统。所述的轮辐式移动臂12包括轮辐支撑杆10和万向轮11。所述的轮辐支撑杆10通过固定螺钉13固定在支撑架底部固定盘14上。
所述的配重升降盘系统包括配重盘15、配重盘升降梅花旋钮9、配重盘升降系统。所述的配重盘升降系统包括升降控制握柄51、升降活动连杆50、配重盘15的连接连杆49、滑动轴承481和482、压缩弹簧47。所述的升降活动连杆50的下方转动连接在固定外管8的端上,上方转动连接在升降控制握柄51的中部位置。所述的升降握柄的前端与连杆49顶部可转动连接。所述的滑动轴承481和482的外径与固定外管8同轴紧密配合,滑动轴承481和482的内径与连杆49滑动连接。所述的压缩弹簧47位于支撑架底部固定盘14和连杆49下方的限位挡板之间。在配重盘15在升起状态时,压缩弹簧处于第一压缩状态,当配重盘15下降接触至地面时,压缩弹簧47处于第二压缩状态,此时配重盘15经由连杆49上的限位挡板对压缩弹簧47施加向下的力,压缩弹簧47对支撑架底部固定盘14施加向下的力,继而使底盘更加稳定的固定在地面上。
所述的多自由度旋转平台系统包括梅花旋钮38、旋转支撑轴承45、水平旋转连接件44、X向旋转连接件42、Y向旋转连接件41、Y向移动平台和X向移动平台。所述的旋转支撑轴承45安装在升降内管6中,其内孔与水平旋转连接件44的下方的圆柱同轴配合。所述的水平旋转连接件44的下方圆柱上周向排布有凹槽39,当旋转到某一角度时通过旋转梅花旋钮38,使旋钮上的螺杆刚好嵌入到凹槽39中使其固定。所述的水平旋转连接件44上有X向旋转连接件42锁紧固定的梅花旋钮43,X向旋转连接件42的下端的圆盘中心与水平旋转连接件44上端的连接孔可转动连接。所述的X向旋转连接件42的下端的旋转圆盘上周向设置有均布的凹槽,通过与旋转梅花旋钮43的配合可以实现X向旋转连接件42的指定旋转角度处固定。所述的Y向旋转连接件41的下端的圆盘中心与X向旋转连接件42上端的连接孔可转动连接。所述的Y向旋转连接件41的下端的旋转圆盘上周向设置有均布的凹槽,通过与旋转梅花旋钮40的配合可以实现Y向旋转连接件41的指定旋转角度处固定。所述Y向旋转连接件41的上端法兰与Y向移动平台连接。
所述的的Y向移动平台包括固定底座95、Y向移动底座96、Y向移动控制梅花旋钮丝杠931和滑动导向杆941。所述的Y向移动控制梅花旋钮丝杠931前端通过嵌入在固定底座95中的轴承进行固定,中部与Y向移动底座96螺母丝杠配合连接,所述的滑动导向杆941与Y向移动控制梅花旋钮丝杠931并排设置一同穿越X向固定底座96。所述的X向移动平台包括X向固定底座96、X向移动控制梅花旋钮丝杠932、滑动导向杆942和X向移动底座92。所述的X向移动控制梅花旋钮丝杠932前端通过嵌入在固定底座96中的轴承进行固定,中部与X向移动底座92螺母丝杠配合连接,所述的滑动导向杆942与Y向移动控制梅花旋钮丝杠932并排设置一同穿越X向固定底座92。所述的X向移动底座92通过法连与控制器底座36连接。
所述手臂系统包括大臂、肘关节、小臂和手部,所述的大臂包括大臂外管56、大臂外管56的橡胶塞52、内管71、柔性肩关节系统、C型支撑架系统和肘部驱动系统。所述的大臂外管56和内管71同轴配合,通过伸缩旋进螺帽701的左旋和右旋实现外管56和内管71的自由伸缩和锁紧状态。
所述柔性肩关节系统包括柔性肩关节外壳22、外壳上封盖53、外壳下封盖60、弹簧组97、上压缩弹簧57、上压缩弹簧57限位螺柱56、下压缩弹簧63、大臂外管56的同轴连接环62。所述的弹簧组97包括压缩弹簧58、59、61,其在同轴连接环62的周向呈120°均布,且其一端嵌入连接在同轴连接环62上设置的凹槽内,另一端嵌入连接在肩关节柔性外壳22内对应的凹槽内。所述的同轴连接环62中部有上下压缩弹簧57和63的安装的凹槽,且内部有弹簧的限位柱。所述柔性肩关节外壳22通过方向凹槽和电机输出轴上的万能连接件55连接,实现同轴传动。
所述的大臂C型支撑架系统分为旋转C型支撑架671和平移C型支撑架6712两个部分,并通过铰链结构实现转动连接。所述的平移C型支撑架6712的外侧通过滑动导杆751、压缩弹簧731和741与易拆连接件231进行连接,所述的易拆连接件231通过拆装握柄691的旋紧和放松使其牢牢固定在大臂外管56上或使其打开任意调整其在大臂外管56上的位置。所述的滑动导向杆751的两端分别固定在平移C型支撑架6712的凹槽侧壁上。所述的压缩弹簧731和741布置在易拆连接件231的上下两侧,且和滑动导向杆751同轴配合。C型支撑架在受到外力作用时,可沿大臂的轴向进行被动滑移。
所述大臂上的旋转C型支撑架671和平移C型支撑架6712上均安装有若干磁铁681,并且其相对面的磁性相异,当穿戴完毕后直接扣合旋转C型支撑架671,两个支撑架上的磁铁由于异性相吸的原理紧紧的扣合在一起,实现对使用者手臂的固定。所述的旋转C型支撑架671和平移C型支撑架6712内侧第一层为柔性泡棉层661,通过双面胶与旋转C型支撑架671和平移C型支撑架6712内表面固定。第二层为柔性充气层651,所述的柔性充气层651其外表面为纤维织物层,内芯为多段串联式气囊,气囊的进气口与出气口为同一口,统一名称为气囊接口641,在气囊接口641处有与气动电磁阀27连接的硅胶软管28,另一路出口通过硅胶软管76与小臂上的气囊接口98进行连接,气动电磁阀27上的另一出口通过硅胶软管与气压传感器26连接,微型气动电磁阀的进气口通过硅胶软管与气泵35的出气口连接。气泵35通过固定环33固定在控制器底板36上,所述的气泵35的电源线与其驱动器连接,所述气压传感器26可实现气囊内充气压力的自动检测,并自动进行充气或放气操作。
所述的肘关节系统包括设置在大臂内管71内部的行星齿轮减速电机77,行星齿轮减速电机77的输出轴连接有蜗杆81,且其一端通过轴承78固定于大臂内管71中。所述的大臂内管71的肘关节位置处的圆形连接盘内侧有安装推力轴承80的凹槽,所述的蜗轮72的内侧同样有安装推力轴承80的凹槽。肘关节安装时蜗轮72和大臂内管上的圆形连接盘同轴配合,且将推力轴承80夹在中间,通过销轴79将蜗轮72和大臂内管71的圆形连接盘连接在一起,并用卡簧98进行轴向定位。当所述的行星齿轮减速电机77带动蜗杆81进行正转或者反转时,蜗轮72将带动小臂内管21产生旋转运动。
所述的小臂包括小臂外管82、小臂外管82的橡胶塞86、小臂内管21、C型支撑架系统和手部系统。所述的小臂外管82和内管21同轴配合,通过伸缩旋进螺帽702的左旋和右旋实现外管82和内管21的自由伸缩和锁紧状态。
所述的小臂的手部系统包括手部握柄89、滑动部件87、滑动轴承88、上压缩弹簧841、上压缩弹簧限位柱831、下压缩弹簧842、下压缩弹簧限位柱832、滑动导向轴85。所述的手部握柄89的前端通过连接柱与滑动部件87连接。所述的滑动部件87在小臂外管82内同轴配合,且其上下两个端面分别有安装上压缩弹簧841和下压缩弹簧842的凹槽,所述的滑动部件87内部同轴安装有滑动轴承88,滑动轴承88内表面与滑动导向轴85同轴连接。所述的上压缩弹簧限位柱831、下压缩弹簧限位柱832与滑动部件87共同作用使上压缩弹簧841、下压缩弹簧842在初始状态具有一定的压缩量,整个手臂在运行状态时,由于人体手臂各个关节旋转的非同心运动特性,手部相对于小臂内管21将产生轴向的偏移,此时手部握柄89将在外力作用下产生运动,以达到更加舒适的穿戴状态。
所述的小臂C型支撑架系统分为旋转C型支撑架672和平移C型支撑架6722两个部分,并通过铰链结构实现转动连接。所述的平移C型支撑架6722的外侧通过滑动导杆752、压缩弹簧732和742与易拆连接件232进行连接,所述的易拆连接件232通过拆装握柄692的旋紧和放松使其牢牢固定在小臂外管82上或使其打开任意调整其在小臂外管82上的位置。所述的滑动导向杆752的两端分别固定在平移C型支撑架6722的凹槽侧壁上。所述的压缩弹簧732和742布置在易拆连接件232的上下两侧,且和滑动导向杆752同轴配合。C型支撑架在受到外力作用时,可沿小臂的轴向进行被动滑移。
所述小臂上的旋转C型支撑架672和平移C型支撑架6722上均安装有若干磁铁682,并且其相对面的磁性相异,当穿戴完毕后直接扣合小臂旋转C型支撑架672,两个支撑架上的磁铁由于异性相吸的原理紧紧的扣合在一起,实现对使用者小臂的固定。所述的旋转C型支撑架672和平移C型支撑架6722内侧第一层为柔性泡棉层662,通过双面胶与旋转C型支撑架672和平移C型支撑架6722内表面固定。第二层为柔性充气层652,所述的柔性充气层652其外表面为纤维织物层,内芯为多段串联式气囊,气囊的进气口与出气口为同一口,统一名称为气囊接口642,所述小臂C型支撑架上的气囊接口642与大臂C型支撑架上的气囊接口641共用一路气源。
参见图1和图3,所述的控制系统包括肩关节驱动电机31、角度传感器34、气泵35、驱动器37、气动电磁阀27、气压传感器26、降压模块90、控制板38、蓝牙模块91、电源开关2、电源接头3、螺旋线4、急停按钮5、平板电脑92、控气外壳1。
所述的肩关节驱动电机31通过L型固定架30固定在控制器底板36上,并在中部通过固定件32进行二次固定,在肩关节驱动电机31的尾部安装有与电机同轴的角度传感器34,可以实时检测肩关节的选装角度。所述的肩关节驱动电机31的输出轴上连接有万能接头29,所述的万能接头29前端为方形接口,并且伸出壳体1的外部,可以与任何与该接头配合的外部其他连接件连接,例如可以连接脚部运动的器械部件。所述的壳体1上设有万能接头29伸出的开孔39。
所述的蓝牙模块91与平板电脑92可以实现无线通讯,所述的平板电脑92既是操作控制终端,同时又是手臂运动状态及训练数据记录与评价的显示终端。
下面对手臂的驱动控制流程进行具体的介绍。
在具体的实施例中,通过电源接头3通过串联的急停按钮5和电源开关2给整个驱动器37和降压模块90进行供电,急停按钮5通过螺旋线4的加长作用,使用时操作者可将急停按钮5握在手中,断开急停按钮5和电源开关2的任何一个按钮,手臂系统立刻处于断电状态。
通过平板电脑92发送需要进行锻炼的模式指令或者手动控制指令,经过蓝牙模块91的接收与解码,将控制信息发送给控制器38,控制器38将控制信号发送给驱动器37,驱动器37将信号给定的驱动电压给驱动电机31,驱动电机输出轴上的万能连接件29通过同轴传动将转动力矩传递给大臂肩关节外壳22。所述的肩关节外壳22内安装有弹簧组97和上下压缩弹簧57和63,由于人体肩部和机械外骨骼的肩部非同心的缘故,在运动过程中人体肩部的旋转中心会不断发生变化,通过弹簧组成的柔性关节可以弥补机械外骨骼肩关节转动中心的变化,从而实现更舒适的穿戴体验,并且在肩关节运动过程中由角度传感器实时检测肩关节的旋转角度并反馈给控制器38。
同样地,当控制器38发出肘关节运动信号后,肘关节驱动电机77带动蜗杆80进行旋转运动,蜗杆80与蜗轮72进行机械配合,从而带动小臂一起进行旋转运动。由于外骨骼的肘关节的旋转中心和人体肘关节的旋转中心非同心运动的原因,在小臂的运动过程中人体手臂向对于机械外骨骼手臂的位置将会发生变化,此时大臂上与小臂上的C型支撑架6712和6722将压缩弹簧731/741/732/742,产生沿大臂外管54和小臂外管82的轴向移动,以达到更加舒适的状态。
所述的大臂上和小臂上的磁固定C型支撑架具有相类似的结构,现以大臂上的磁固定C型支撑架为例介绍其运动过程。
当将旋转C型支撑架671与移动C型支撑架6712扣合以后,在磁铁组681的作用下实现环抱状态。当平板电脑92发送气泵启动指令后,气泵35起动,通过电磁阀27的通断控制放气或者是充气,电磁阀27的出气口一路通过硅胶软管28连接C型支架上的气囊接口641,另一路通过硅胶软管与气压传感器27连接,在给气囊651充气过程中气囊651逐渐膨胀并与人体手臂不断充分接触并使气囊内651内的气压发生变化,气压传感器27实时检测气囊的充气压力,当达到设定值后气泵35断电,气囊651达到既能固定人体手臂又能使手臂处于空气接触的柔性状态,使得更加舒适和安全。
本申请实施例提供的上肢康复锻炼助力系统可应用在人体康复训练,协助穿戴者进行上肢运动。
本领域技术人员在考虑说明书及实践这里公开的发明实施方案后,将容易想到本发明的其它实施方案。本发明旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由所附的权利要求指出。
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
- 一种上肢康复锻炼助力系统
- 一种气液并联驱动上肢康复训练助力系统