一种扫地机器人行走机构
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及智能家居技术领域,具体为一种扫地机器人行走机构。
背景技术
随着科技的进步,越来越多的智能型家居进入到人们的生活中,例如智能空调,智能冰箱,智能洗碗柜和智能扫地机器人等等各种智能家居,给人们的日常生活带来了非常大的便利,其中扫地机器人对于工作压力大的人来说,尤为重要。
扫地机器人是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。扫地机器人的发展方向,将是更加高级的人工智能带来的更高的清扫效果、更高的清扫效率、更大的清扫面积。
但是由于现如今的房屋住宅内部推拉门居多,而推拉板多了之后,需要在地面上加上导轨,从而方便推拉板的推拉,但是有了导轨,扫地机器人就不容易进入到另一件房屋进行打扫,需要人工对其进行防置,导致扫地机器人不能够自己完成打扫房间的任务;并且现在的房屋地面上基本上都是地板,但是现有的扫地机器人不能够清理地板的缝隙,这样就容易导致滋生细菌等问题;而且在清理中,清理到头发丝使,容易使头发丝缠绕到进风通道内部,从而导致扫地机器人发生故障;并且现有的扫地机器人基本都是圆形的,但是圆形的扫地机器人,不方便清理墙角。
所以我们提出了一种扫地机器人行走机构,以便于解决上述中提出的问题。
发明内容
本发明的目的在于提供一种扫地机器人行走机构,以解决上述背景技术提出的但是由于现如今的房屋住宅内部推拉门居多,而推拉板多了之后,需要在地面上加上导轨,从而方便推拉板的推拉,但是有了导轨,扫地机器人就不容易进入到另一件房屋进行打扫,需要人工对其进行防置,导致扫地机器人不能够自己完成打扫房间的任务;并且现在的房屋地面上基本上都是地板,但是现有的扫地机器人不能够清理地板的缝隙,这样就容易导致滋生细菌等问题;而且在清理中,清理到头发丝使,容易使头发丝缠绕到进风通道内部,从而导致扫地机器人发生故障;并且现有的扫地机器人基本都是圆形的,但是圆形的扫地机器人,不方便清理墙角的问题。
为实现上述目的,本发明提供如下技术方案:一种扫地机器人行走机构,包括行走底座、扫地机器人、蓄电池和马达,所述行走底座上侧设置有扫地机器人,所述行走底座外侧设置有转动轴,且转动轴外侧固定有支撑杆,所述行走底座下端设置有抹布放置板,所述行走底座下端设置有蓄电池,所述行走底座下端设置有扭转弹簧,且扭转弹簧内部设置有转动杆,所述转动杆外侧连接有清扫杆,且清扫杆外侧固定有压缩弹簧,所述压缩弹簧的外侧连接有移动杆,所述行走底座下端设置有第一清理刷,所述行走底座下端设置有底盖,且底盖下端设置有滑轮,所述底盖下端设置有吸尘口,所述底盖下端设置有抹布口,所述行走底座内部设置有第二清理刷,且第二清理刷外侧连接有转动杆,所述第二清理刷外侧设置有放置盒,所述行走底座内部安装有清理轮,且清理轮外侧连接有储水盒,同时清理轮外侧连接有压板,所述转动杆下端设置有第一齿轮,所述行走底座内部设置有第一锥形齿轮,所述行走底座内部安装有第二齿轮,且第二齿轮外侧连接有第三齿轮,所述行走底座内部安装有马达,所述第三齿轮内部固定有连接杆,所述第一锥形齿轮外侧连接有第二锥形齿轮。
优选的,所述支撑杆设置有四个,且两边的支撑杆关于行走底座的中心线对称。
优选的,所述清扫杆与转动杆的连接方式为固定连接,且清扫杆通过扭转弹簧在行走底座上构成旋转结构,并且该旋转结构的旋转角度小于45°。
优选的,所述移动杆通过压缩弹簧在清扫杆上构成伸缩结构,且移动杆与压缩弹簧的连接方式为固定连接。
优选的,所述移动杆设置有两个,且移动杆关于行走底座的中心线对称,并且移动杆顶端之间的距离大于行走底座的长度。
优选的,所述第二清理刷与放置盒的连接方式为活动连接,且放置盒的设置有梳齿结构。
优选的,所述清理轮与储水盒的连接方式为活动连接,且清理轮与压板的连接方式为活动连接。
优选的,所述第一锥形齿轮与第二锥形齿轮的连接方式为活动连接,且1个第一锥形齿轮与2个第二锥形齿轮相连接。
优选的,所述第二锥形齿轮的个数与转动轴的个数相同,且第二锥形齿轮通过第一锥形齿轮构成旋转结构。
与现有技术相比,本发明的有益效果是:该扫地机器人行走机构;
(1)设置有支撑杆、转动轴,可通过马达带动转动轴进行转动,从而使支撑杆进行转动,使该扫地机器人进行跨越障碍,并且在对其跨越障碍时,使该扫地机器人保持水平,防止因跨越过程中动作不稳,而导致该扫地机器人倾倒,从而影响了工作效率。
(2)设置有清理轮、储水盒、压板,可通过清理轮的转动使其对底板的缝隙进行清理,清理之后通过压板与储水盒进行清理清理轮上侧的垃圾灰尘等物质。
(3)设置有第二清理刷、转动杆、放置盒,第二清理刷可对吸尘口前面的头发丝等物质进行清理,防止头发丝进入到进风通道,从而使其堵塞,影响工作效率。
(4)设置有转动杆、清扫杆、移动杆,可对墙角进行清理,并且平时在对地板进行清理时,可通过清扫杆与移动杆使其清理到更多的地方,从而减少了工作时间,而靠近墙角进行清理时,通过压缩弹簧与扭转弹簧,使墙角的垃圾等移动到行走底座中间,从而对其进行清理。
附图说明
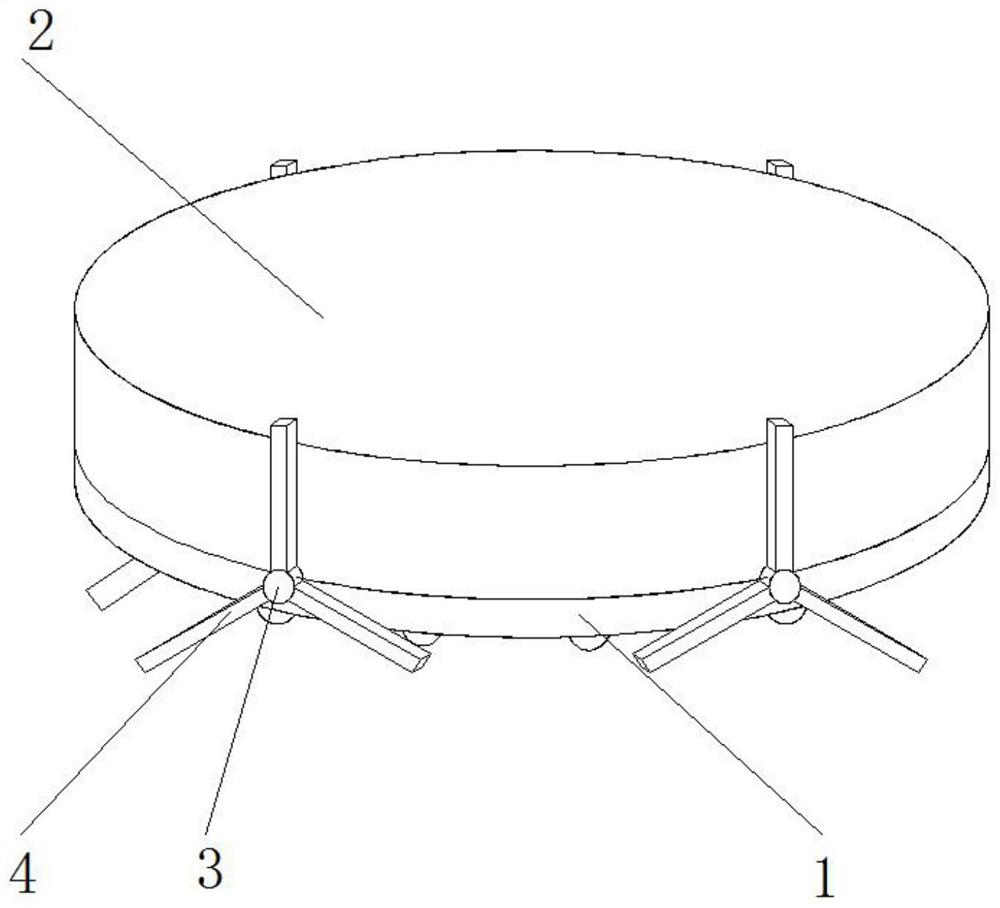
图1为本发明一种扫地机器人行走机构主体结构示意图;
图2为本发明一种扫地机器人行走机构仰视结构示意图;
图3为本发明一种扫地机器人行走机构内部结构示意图;
图4为本发明一种扫地机器人行走机构侧视结构示意图;
图5为本发明一种扫地机器人行走机构第二清理刷结构示意图;
图6为本发明一种扫地机器人行走机构滑轮结构示意图;
图7为本发明一种扫地机器人行走机构清扫杆结构示意图;
图8为本发明一种扫地机器人行走机构马达结构示意图。
图中:1、行走底座;2、扫地机器人;3、转动轴;4、支撑杆;5、抹布放置板;6、蓄电池;7、扭转弹簧;8、第一转动杆;9、清扫杆;10、压缩弹簧;11、移动杆;12、第一清理刷;13、底盖;14、滑轮;15、吸尘口;16、抹布口;17、第二清理刷;18、第二转动杆;19、放置盒;20、清理轮;21、储水盒;22、压板;23、第一齿轮;24、第一锥形齿轮;25、第二齿轮;26、第三齿轮;27、马达;28、连接杆;29、第二锥形齿轮。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-8,本发明提供一种技术方案:一种扫地机器人行走机构,包括行走底座1、扫地机器人2、转动轴3、支撑杆4、抹布放置板5、蓄电池6、扭转弹簧7、第一转动杆8、清扫杆9、压缩弹簧10、移动杆11、第一清理刷12、底盖13、滑轮14、吸尘口15、抹布口16、第二清理刷17、第二转动杆18、放置盒19、清理轮20、储水盒21、压板22、第一齿轮23、第一锥形齿轮24、第二齿轮25、第三齿轮26、马达27、连接杆28和第二锥形齿轮29,所述行走底座1上侧设置有扫地机器人2,所述行走底座1外侧设置有转动轴3,且转动轴3外侧固定有支撑杆4,所述行走底座1下端设置有抹布放置板5,所述行走底座1下端设置有蓄电池6,所述行走底座1下端设置有扭转弹簧7,且扭转弹簧7内部设置有第一转动杆8,所述第一转动杆8外侧连接有清扫杆9,且清扫杆9外侧固定有压缩弹簧10,所述压缩弹簧10的外侧连接有移动杆11,所述行走底座1下端设置有第一清理刷12,所述行走底座下端设置有底盖13,且底盖13下端设置有滑轮14,所述底盖13下端设置有吸尘口15,所述底盖13下端设置有抹布口16,所述行走底座1内部设置有第二清理刷17,且第二清理刷17外侧连接有第二转动杆18,所述第二清理刷17外侧设置有放置盒19,所述行走底座1内部安装有清理轮20,且清理轮20外侧连接有储水盒21,同时清理轮20外侧连接有压板22,所述第一转动杆8下端设置有第一齿轮23,所述行走底座1内部设置有第一锥形齿轮24,所述行走底座1内部安装有第二齿轮25,且第二齿轮25外侧连接有第三齿轮26,所述行走底座1内部安装有马达27,所述第三齿轮26内部固定有连接杆28,所述第一锥形齿轮24外侧连接有第二锥形齿轮29。
支撑杆4设置有四个,且两边的支撑杆4关于行走底座1的中心线对称,方便使该机器人越过导轨等障碍。
清扫杆9与第一转动杆8的连接方式为固定连接,且清扫杆9通过扭转弹簧7在行走底座1上构成旋转结构,并且该旋转结构的旋转角度小于45°,方便对墙角进行清理。
移动杆11通过压缩弹簧10在清扫杆9上构成伸缩结构,且移动杆11与压缩弹簧10的连接方式为固定连接,方便使垃圾推至扫地机器人2内部,从而方便进行清理。
移动杆11设置有两个,且移动杆11关于行走底座1的中心线对称,并且移动杆11顶端之间的距离大于行走底座1的长度,使该扫地机器人2能够清理到更多的地方。
第二清理刷17与放置盒19的连接方式为活动连接,且放置盒19的设置有梳齿结构,方便使放置盒19清理第二清理刷17上的头发等。
清理轮20与储水盒21的连接方式为活动连接,且清理轮20与压板22的连接方式为活动连接,方便使其清理地板的缝隙。
第一锥形齿轮24与第二锥形齿轮29的连接方式为活动连接,且1个第一锥形齿轮24与2个第二锥形齿轮29相连接,方便使支撑杆4进行转动。
第二锥形齿轮29的个数与转动轴3的个数相同,且第二锥形齿轮29通过第一锥形齿轮24构成旋转结构。
本实施例的工作原理:在使用该扫地机器人行走机构时,首先,要先检查该装置的完整性,然后将该装置运输到相应的工作位置,再将扫地机器人2安装在行走底座1上侧,将吸尘口15与扫地机器人2的吸尘装置相连接,然后将该行走机构通过马达27发动,使扫地机器人2开始运动,接着吸尘器开始运动,从而随着行走机构的运动开始对房屋进行清理,清扫杆9与移动杆11可以将更远处的垃圾碎屑等物质,运输到第一清理刷12外侧,然后第一清理刷12转动,使垃圾碎屑输送到吸尘口15的正下方,在通过吸尘口15到达扫地机器人2的内部,当该扫地机器人2贴墙开始进行清理时,清扫杆9会通过扭转弹簧7进行旋转,使清扫杆9与扭转弹簧7与墙壁保持水平,当该扫地机器人2移动到墙壁的角落时,通过控制马达27带动第一齿轮23转动,从而使清扫杆9进行转动,使其对墙角进行清理,然后将清扫出的杂质移动到该移动结构的中间,在通过第一清理刷12对其进行清理,并且在对其进行清理时,通过清理轮20可对地板的缝隙进行清理,而清理轮20清理了之后,通过压板22对清理轮20进行清理,然后在通过储水盒21对清理轮20进行润湿,从而使清理轮20沾走地板缝隙内部的粉尘等,并且在对其进行清理时,可通过带动第二转动杆18转动,从而带动第二清理刷17进行转动,从而对吸尘口15前端的头发丝等软性物质进行清理,而缠绕到第二清理刷17上的头发丝通过第二清理刷17的转动到达放置盒19内部,并且留在放置盒19的内部,当清理结束之后,可通过对放置盒19内部进行拆卸,从而对头发丝进行清理。
当对一间房间清理结束之后,通过发动马达27带动第二齿轮25转动,从而带动第三齿轮26进行转动,然后连接杆28开始转动,从而使第一锥形齿轮24进行转动,从而使第二锥形齿轮29与转动轴3进行转动,然后使支撑杆4进行运动,从而使该扫地机器人2通过该移动机构跨越过住宅内部的导轨,并且在跨越过程中,还可以对该扫地机器人2保持稳定,防止该扫地机器人2因跨越过程中不能够保持稳定,而导致歪斜翻转,从而印象该扫地机器人2的工作效率,并且抹布放置板5可放置抹布,从而可以擦拭清理轮20留在地板上的水痕,这样就完成了整个工作过程,且本说明书中未作详细描述的内容,例如扭转弹簧7、压缩弹簧10、马达27等,均属于本领域专业技术人员公知的现有技术。
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种扫地机器人行走机构
- 一种扫地机器人行走机构