一种无人机巡航通信的能量最小化方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明属于空天地一体化领域,涉及无人机巡航和无人机辅助通信技术领域,具体涉及一种无人机巡航通信的能量最小化方法。
背景技术
无人机由于其小型化、可任意部署等特点,被大量用于空天地一体化领域,尤其用于无人机辅助通信等,但由于其所携带的能量有限,而大量部署无人机则往往造成能源和成本的浪费,为最大程度地为地面节点提供通信条件并节约成本,有必要研究在满足通信情况下的无人机能量最小化。无人机能量优化所涉及的方面比较多,包括规划无人机飞行路径、优化无人机的飞行时间、优化通信时间等,从而实现无人机的能量最小化。无人机飞行路径的规划方法有多种,考虑到需要对区域实现全覆盖,往往采用网格化、蜂窝化以及圆覆盖方法等。同理优化无人机飞行时间的方法也有多种,包括优化节点通信时间,寻找最优覆盖、最优飞行高度从而减少任务时间等。
目前已有关于无人机能量最小化的研究,但对于节点位置未知的无人机辅助通信的相关研究还比较缺乏。此外,现有技术中,一些研究分析了满足通信延迟的飞行无人机的覆盖率和可达速率,以及满足通信条件的聚集区域的悬停时间最小化以及满足通信下的无人机路径离散化等,但还缺乏满足通信条件下结合无人机路径规划和能量最小化方面的研究。因此,设计一种无人机巡航通信的能量最小化方法对灾后辅助救援以及边缘地区的无线通信有重要意义。
发明内容
为了解决上述问题,本发明提供一种无人机巡航通信的能量最小化方法,该方法采用单无人机以“飞行-通信”和“悬停-通信”两种方式实现节点未知区域的通信覆盖和已知聚集区域的悬停覆盖,从而辅助灾后通信;在无人机最大化覆盖区域的同时最小化能耗。
一种无人机巡航通信的能量最小化方法,包括以下步骤:
S1、建立无人机与地面节点之间的通信,设置满足边界节点通信的最小吞吐量Q,在边界节点达到最小吞吐量的前提下计算满足地面节点通信的无人机最优飞行速度;
S2、将整片矩形区域网格化,确定无人机最大化区域覆盖同时最小化能耗的飞行路径;
S3、根据无人机最优飞行速度和无人机巡航路径计算无人机飞行时间和飞行通信相关的能量,并根据已知聚集点数和相应地聚集点处的节点数计算无人机悬停时间和悬停通信相关的能量;
S4、结合无人机飞行时间、飞行通信相关的能量和无人机悬停时间、悬停通信相关的能量计算出在整个系统下,无人机实现巡航通信的最小化能量E
在一种优选实施方式中,当边界节点的通信数据量大于最小吞吐量Q时,则认为边界节点能实现正常通信,计算表达式为:
其中,P
在一种优选实施方式中,无人机最优飞行速度v′的表达式为:
其中,B
在一种优选实施方式中,将整片矩形区域网格化,确定无人机最大化区域覆盖同时最小化能耗的巡航路径具体包括:将整片矩形区域划分为大小相同的矩形网格,确定每个网格的几何中心,无人机以内螺旋方式依次巡航每个网格的几何中心和已知聚集点,实现对整个复杂区域的通信覆盖。
在一种优选实施方式中,步骤S3中,无人机飞行时间T
其中,q
无人机飞行通信相关的能量E
其中,d
在一种优选实施方式中,步骤S3中,无人机悬停时间T
其中,G为已知聚集点个数,g∈G;N为对应聚集点处的节点数目,n∈N;L为子信道数目,l∈L;Q表示边界节点通信的最小吞吐量,B
无人机悬停通信相关的能量E
E
其中,P
在一种优选实施方式中,无人机实现巡航通信的最小化能量E
其中,E
有益效果:
1.本发明针对地面节点用户分布不均的情形,提出以无人机巡航方式辅助通信的方法,该方法相比于无人机以“悬停-通信”辅助通信的方法,节约了部署多个无人机所需的成本。
2.本发明中将“飞行-通信”和“悬停-通信”两种方式结合应用,既避免了节点稀疏区域需悬停以辅助通信的能量浪费,又保证了聚集区域处的服务质量。
3.无人机以内螺旋方式巡航包含特殊聚集区域或聚集点的矩形区域,该方式为无人机规划了最优路径,节约了无人机飞行相关的能量。
4.本发明分析了无人机巡航通信的最优飞行速度,该速度使得无人机在固定发射功率情况下以最优覆盖辅助节点通信。
5.本发明分析了无人机对一片存在特殊聚集点的矩形区域巡航通信的最小能量,该方法对存在节点位置未知的复杂情形提供了一种能量优化的参考方法。
附图说明
下面结合附图和具体实施方式对本发明做进一步详细的说明。
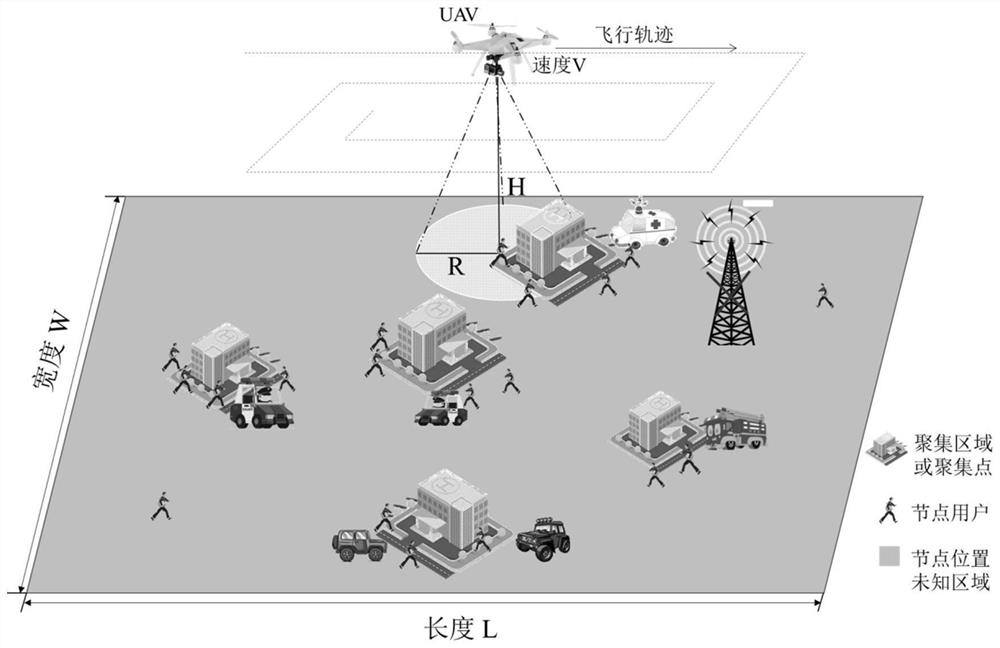
图1为本实施例提供的一种无人机巡航通信模型;
图2为本实施例提供的一种无人机飞行速度分析示意图;
图3为本实施例提供的一种无人机巡航通信覆盖路径规划图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本实施例基于一种无人机巡航通信系统实现,如图1所示,该系统所规划的通信巡航区域为一片矩形区域,该区域的尺寸为L×W(m);一架旋翼无人机,无人机的飞行高度固定为H,无人机对地面的覆盖半径为R;该矩形区域中存在G个聚集点,G个聚集点中一共存在N个节点用户或车辆;其余区域为节点稀疏区域,稀疏区域中节点位置未知。
本实施例提供一种无人机巡航通信的能量最小化方法,单无人机以“飞行-通信”、“悬停-通信”两种方式为矩形区域中的地面所有节点提供通信条件,矩形区域的长为L、宽为W。该方法包括但不限于如下步骤:
S1、计算满足地面节点通信的无人机最优飞行速度。
建立无人机与地面节点之间的通信,设置满足边界节点通信的最小吞吐量Q。
无人机以最优飞行速度为地面节点提供通信覆盖,如图2所示为无人机对地面节点的飞行覆盖示意图,当边界节点满足通信条件时,阴影区域内的节点即可满足通信,为方便分析,取重叠区域中最宽的宽度作为地面覆盖半径R,可得满足节点通信下的半径
其中,P
在边界节点达到最小吞吐量的前提下计算无人机最佳飞行速度,无人机最优飞行速度v′的表达式为:
其中,B
无人机最优飞行速度表达式的推导过程如下:
对上述公式
其中,
由于反正切函数可近似为:
S2、无人机在得到飞行速度之后,紧接着分析无人机的飞行路径,以便寻找最优飞行路径,从而减少飞行通信相关的能量。因此将整片矩形区域网格化,确定无人机最大化区域覆盖同时最小化能耗的巡航路径。具体操作包括:针对一片矩形区域中存在已知聚集节点位置和未知节点位置的复杂区域,将整片矩形区域划分为大小相同的矩形网格(考虑到存在接入延迟,将网格的边长设置为
在一种优选实施方式中,当无人机巡航网格点时,若相邻两个网格几何中心之间的区域内存在已知聚集点,则无人机先巡航该已知聚集点,再巡航下一个网格的几何中心,并且优先选择靠近矩形区域边界的几何中心点。
在一种优选实施方式中,当无人机将所有网格中心和所有已知聚集点巡航一遍完成后,直线飞回到初始巡航的网格中心点,重复进行上述内螺旋方式巡航。
S3、根据无人机最优飞行速度和无人机飞行路径计算无人机飞行时间和飞行通信相关的能量,并根据已知聚集点数和相应地聚集点处的节点数计算无人机悬停时间和悬停通信相关的能量。
对于已获得的无人机飞行路径以及相应的路径点,考虑对整条路径按路径点进行路径离散化,根据上述中的网格几何中心点计算出路径段总数和每段路径的长度,根据路径段总数和无人机的飞行速度,可得每段路径所需的无人机飞行时间T
其中,q
此外,旋翼无人机的功率表达式为:
其中,d
其中,d
对于已知聚集点区域,由于聚集节点数较多,需要无人机悬停一段时间以满足通信,而所需悬停的时间则根据聚集区域所容纳的节点数计算;根据已知聚集点数和相应地聚集点处的节点数计算无人机悬停时间和悬停通信相关的能量,可得无人机悬停时间T
其中,G为已知聚集点个数,g∈G;N为对应聚集点处的节点数目,n∈N;L为子信道数目,l∈L,(H
则对应地无人机悬停通信相关的能量E
E
其中,P
S4、根据旋翼无人机的功率分析,结合无人机飞行时间、飞行通信相关的能量和无人机悬停时间、悬停通信相关的能量可计算出在整个系统下,无人机实现巡航通信的最小化能量E
其中,E
当介绍本申请的各种实施例时,词语“包括”、“包含”和“具有”都是包括性的并意味着除了列出的元件之外,还可以有其它元件。
需要说明的是,本领域普通技术人员可以理解实现上述方法实施例中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法实施例的流程。其中,所述存储介质可为磁碟、光盘、只读存储记忆体(Read-0nly Memory,ROM)或随机存储记忆体(RandomAccess Memory,RAM)等。
以上所述仅是本申请的具体实施方式,应当指出,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种无人机巡航通信的能量最小化方法
- 一种固定翼无人机通信过程能量优化方法