一种原车加装360度全景泊车系统的方法及系统
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及泊车系统技术领域,具体涉及一种原车加装360度全景泊车系统的方法及系统。
背景技术
随着居民汽车持有量的增多,城市道路状况的不理想,在汽车上安装泊车系统的情况已经越来越多。传统的泊车系统是通过倒车影像来泊车,通过安装在车尾的摄像头,将摄像头所拍摄的影像传输到车内的显示屏上,驾驶人员都过传输的影像观察车后情况,避开障碍来完成泊车,然而传统的泊车系统由于倒车影像只能观察车身后的图像,对车身两侧的情况存在盲区,不适合用于路边侧方位停车的情况。现在市面上也有一些全景泊车辅助系统,全景泊车辅助系统作为一个新兴的汽车电子科技,是通过车身周围四个摄像头拍摄的实时影像拼接到一个呈俯视角度的全车及周边图像的画面,从而实现实时辅助驾驶人员泊车。
现有技术存在以下不足:传统技术360度全景辅助系统清晰度低传输方式都是通过模拟视频传输,通过原车主机后视通道显示,司机快速上车启动倒车时要等原车导航主机启动完成后才可以显示影像体验,并且不支持原车触控和旋钮控制,进而使用效果欠佳。
因此,发明一种原车加装360度全景泊车系统的方法及系统很有必要。
发明内容
为此,本发明提供一种原车加装360度全景泊车系统的方法及系统,通过在CAN总线系统添加CAN总线控制模块和CAN处理模块,CAN处理模块采集车辆本体的档位数据程序处理、转向灯数据程序处理、方向盘程序数据处理、雷达程序数据处理和车门车速数据处理,并且与数据处理模块配合使用在屏幕显示模块上增添了原车触控、旋钮控制,并且通过与电子继电器的配合使用;通过在车辆本体的前后左右四个方向设置摄像头,可以将车辆四周的景象都摄录下来,然后通过数据处理模块将四个摄像头的影像信息合成鸟瞰视图,通过电子继电器将影响数据传递给屏幕显示模块,以解决传统技术360度全景辅助系统中需要司机快速上车启动倒车时要等原车导航主机启动完成后才可以显示影像体验,并且不支持原车触控和旋钮控制的问题。
为了实现上述目的,本发明提供如下技术方案:一种原车加装360度全景泊车系统的方法,其特征在于:包括以下步骤:
S1、车辆位姿采集:在车头、车尾、左右后视镜位置处,分别固定安装四个专车专用摄像头;
S2、位姿数据传输:通过视频数据处理控制模块将多路摄像头传输过来的视频数据进行预处理,并且叠加3D原车专用车模型转换成LVDS信号发送到视频数据转换模块;
S3、位姿数据转换:视频数据转换模块将视频数据处理控制模块传输过来的lvds视频信号发送给电子继电器模块,通过电子继电器模块将lvds1信号适配原车显示屏幕;
S4、控制信号转接:通过CAN芯片收到原车操控过来的数据在can1芯片解析后传输到MCU的can1接收接口,然后解析出车辆总线数据,并将车辆总线数据发生给视频控制模块,其他数据通过MCU的can2接口传输到CAN2芯片转换为CAN数据然后发送到原车主机,同时原车主机过来的数据在CAN2芯片解析后直接通过can1发送接口转发到原车操控,由原车主机生成lvds2信号,并由原车主机发送给电子继电器模块;
S5、视频转接:电子继电器模块将原车主机的LVDS信号和视频数据转换模块的LVDS信号进行切换,并且切换到视频转换通路。
优选的,所述步骤S1、车辆位姿采集中:前摄像头设置在中网位置,左右摄像头设置在左右后视镜底盖位置处。
优选的,所述步骤S2、位姿数据预处理中:对视频数据进行滤波、畸变、拼接等,最终形成俯视鸟瞰图。
优选的,所述步骤S2、位姿数据预处理中:视频数据处理控制模块同时控制视频数据转换模块。
优选的,所述步骤S4、控制信号转接中:车辆总线数据具体包括方向盘转向数据、档位切换数据、信号灯切换数据、前后雷达数据、车速和车门数据、触摸屏数据和旋钮数据。
一种原车加装360度全景泊车系统,其特征在于:包括设置在车辆本体上的摄像采集模块、数据处理模块、显示屏幕模块、CAN总线系统、原车主机和电磁继电器,所述CAN总线系统包括CAN总线控制模块,所述CAN总线系统包括CAN处理模块,所述CAN处理模块与CAN总线控制模块电性连接,所述摄像采集模块、CAN总线系统和电磁继电器分别与数据处理模块电性连接,所述显示屏幕模块和原车主机分别与电磁继电器电性连接。
优选的,所述摄像采集模块包括四个专车专用摄像头,四个所述专车专用摄像头分别固定安装在车头、车尾、左右后视镜位置处,所述前摄像头设置在中网位置,所述左右摄像头设置在左右后视镜底盖位置处且垂直朝向地面设置。
优选的,所述CAN处理模块用于处理车辆本体的档位数据程序处理、转向灯数据程序处理、方向盘程序数据处理、雷达程序数据处理和车门车速数据处理。
优选的,所述数据处理模块包括视频数据处理控制模块和视频数据转换模块,所述视频数据控制模块用于将摄像采集模块传输的视频数据进行滤波、畸变、拼接,形成俯视鸟瞰图,所述视频数据转换模块用于将视频数据处理控制模块传输过来的lvds视频信号适配原车显示屏幕并叠加轨迹线。
优选的,所述CAN总线控制模块与原车主机电性连接,所述显示屏幕模块包括触摸板控制模块。
本发明的有益效果是:
1、本发明通过在CAN总线系统添加CAN总线控制模块和CAN处理模块,CAN处理模块采集车辆本体的档位数据程序处理、转向灯数据程序处理、方向盘程序数据处理、雷达程序数据处理和车门车速数据处理,并且与数据处理模块配合使用在屏幕显示模块上增添了原车触控、旋钮控制,通过电子继电器将原车主机的LVDS信号和视频数据转换模块的LVDS信号进行切换,分别切换显示在显示屏幕模块上,泊车视图显示前摄像头画面,可以实时监测前进路路况,便于司机清楚地了解车辆四周的环境,引导司机将车辆既快又准地驶入预设的泊车位置;
2、本发明中通过在车辆本体的前后左右四个方向设置摄像头,可以将车辆四周的景象都摄录下来,然后通过数据处理模块将四个摄像头的影像信息合成鸟瞰视图,通过电子继电器将影响数据传递给屏幕显示模块,无需原车导航主机启动完成后可以也可以显示影像体验,提高了司机在实际使用中的操控效果。
附图说明
图1为本发明提供的原车CAN数据处理框图;
图2为本发明提供的CAN芯片处理原理图;
图3为本发明提供的MCU部分原理图;
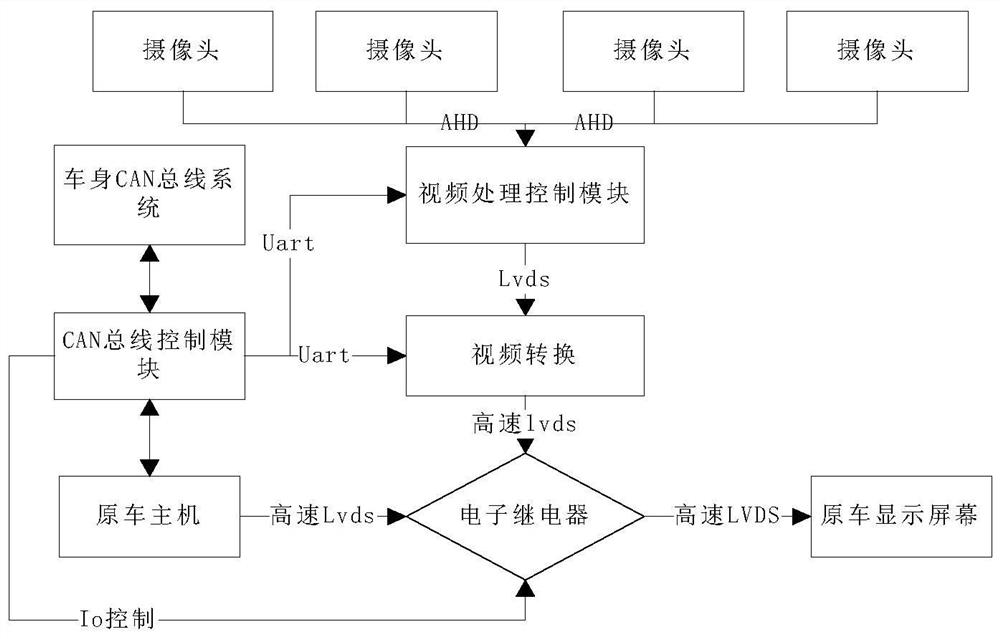
图4为本发明提供的原车加装360度全景泊车系统框图;
图5为本发明提供的CAN处理模块流程框图;
图6为本发明中视频信号与原车屏幕显示适配处理的流程框图。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
实施例,本发明提供的一种原车加装360度全景泊车系统的方法,其特征在于:包括以下步骤:
S1、车辆位姿采集:在车头、车尾、左右后视镜位置处,分别固定安装四个专车专用摄像头;
S2、位姿数据传输:通过视频数据处理控制模块将多路摄像头传输过来的视频数据进行预处理,并且叠加3D原车专用车模型转换成LVDS信号发送到视频数据转换模块;
S3、位姿数据转换:视频数据转换模块将视频数据处理控制模块传输过来的lvds视频信号发送给电子继电器模块,通过电子继电器模块将lvds1信号适配原车显示屏幕;
S4、控制信号转接:通过CAN芯片收到原车操控过来的数据在can1芯片解析后传输到MCU的can1接收接口,然后解析出车辆总线数据,并将车辆总线数据发生给视频控制模块,其他数据通过MCU的can2接口传输到CAN2芯片转换为CAN数据然后发送到原车主机,同时原车主机过来的数据在CAN2芯片解析后直接通过can1发送接口转发到原车操控,由原车主机生成lvds2信号,并由原车主机发送给电子继电器模块;
S5、视频转接:电子继电器模块将原车主机的LVDS信号和视频数据转换模块的LVDS信号进行切换,并且切换到视频转换通路。
本发明的优点在于:本发明中原车显示屏幕模块、CAN总线系统和原车主机为固定安装在车辆本体上,通过在CAN总线系统添加CAN总线控制模块和CAN处理模块,CAN处理模块采集车辆本体的档位数据程序处理、转向灯数据程序处理、方向盘程序数据处理、雷达程序数据处理和车门车速数据处理,并且与数据处理模块配合使用在屏幕显示模块上增添了原车触控、旋钮控制,通过电子继电器将原车主机的LVDS信号和视频数据转换模块的LVDS信号进行切换,分别切换显示在显示屏幕模块上,泊车视图显示前摄像头画面,可以实时监测前进路路况,便于司机清楚地了解车辆四周的环境,引导司机将车辆既快又准地驶入预设的泊车位置,并且通过在车辆本体的前后左右四个方向设置摄像头,可以将车辆四周的景象都摄录下来,然后通过数据处理模块将四个摄像头的影像信息合成鸟瞰视图,通过电子继电器将影响数据传递给屏幕显示模块,无需原车导航主机启动完成后可以也可以显示影像体验,提高了司机在实际使用中的操控效果。
进一步地,所述步骤S1、车辆位姿采集中:前摄像头设置在中网位置,左右摄像头设置在左右后视镜底盖位置处,车辆本上安装多个摄像头可以将车辆四周的景象都摄录下来,然后通过数据处理模块将四个摄像头的影像信息合成鸟瞰视图,通过电子继电器将影响数据传递给屏幕显示模块,相比较传统的无需启动车辆在启动倒车时要等原车导航主机启动完成后才可以显示影像体验方便快捷实用;
进一步地,所述步骤S2、位姿数据预处理中:对视频数据进行滤波、畸变、拼接等,最终形成俯视鸟瞰图,视频数据处理控制模块将多路摄像头传输的视频数据进行处理,将处理后的数据同时叠加3D原车专用车模型转换成LVDS信号发送到视频数据转换模块,最终匹配原车显示屏幕进行显示;
进一步地,所述步骤S2、位姿数据预处理中:视频数据处理控制模块同时控制视频数据转换模块,视频数据处理控制模块控制视频数据转换模块的信号传输,视频数据转换模块将信号发送给电子继电器,电子继电器负责将原车主机Lvds信号通路切换到视频转换通路,并通过触摸板控制模块控制360度界面设置、切换;
原车主机视频是通过LVDS信号传输到原车屏幕,将视频通过视频信号处理转换成和原车协议一样的信号,同时将360度显示界面分辨率适配原车屏幕分辨率,原车主机视频LVDS信号和360度视频LVDS信号通过高速抗干扰电子开关切换。显示原车主机界面时,继电切换到原车主机视频信号通道,显示360度视频解码时继电器切换到360度视频信号通道。
进一步地,请参阅附图1、图2和图3,步骤S4、控制信号转接中:车辆总线数据具体包括方向盘转向数据、档位切换数据、信号灯切换数据、前后雷达数据、车速和车门数据、触摸屏数据和旋钮数据,当CAN芯片收到原车操控过来的数据在can1芯片解析后传输到MCU的can1接收接口然后解析出触摸板、旋钮、按键、方向盘、档位、信号灯、车门、雷达、车速、时间数据转发到视频处理控制,其他数据通过MCU的can2接口传输到CAN2芯片转换为CAN数据然后发送到原车主机,同理原车主机过来的数据在CAN2芯片解析后传输到MCU的can2接口直接通过can1发送接口转发到原车操控,原车操控CAN是原车触摸屏和旋钮部分的CAN发送模块,CAN1芯片是负责原车操控CAN端的接收和发送数据,MCUcan接收、MCUcan发送、MCUcan2接收、MCUcan2发送为MCU内部can软件处理程序实现CAN接收和发送,CAN2芯片负责原车主机端的can数据接收和发送。
一种原车加装360度全景泊车系统,其特征在于:包括设置在车辆本体上的摄像采集模块、数据处理模块、显示屏幕模块、CAN总线系统、原车主机和电磁继电器,所述CAN总线系统包括CAN总线控制模块,所述CAN总线系统包括CAN处理模块,所述CAN处理模块与CAN总线控制模块电性连接,所述摄像采集模块、CAN总线系统和电磁继电器分别与数据处理模块电性连接,所述显示屏幕模块和原车主机分别与电磁继电器电性连接。
请参阅图4,该系统中通过摄像采集模块中的多路摄像头主要负责实时采集车身前后左右的视频,视频数据处理控制模块负责多路摄像头传输过来的视频进行滤波、畸变、拼接最终形成俯视鸟瞰图,同时对其他模块进行控制,视频数据转换模块主要负责将视频数据处理控制模块传输过来的lvds视频信号适配原车显示屏幕并叠加轨迹线,电子继电器主要负责将原车主机的LVDS信号和视频数据转换模块的LVDS+-信号进行切换,原车显示屏幕、CAN总线系统和原车主机为固定安装在本体上,CAN总线控制模块包含控制信号转接和CAN处理模块;
CAN总线控制模块从CAN总线系统接收车身总线数据,具体包括转向灯数据、档位数据、方向盘数据、雷达数据、触摸屏数据、旋钮数据,同时将数据发送到原车主机,原车主机接收的CAN数据直接发送到CAN总线系统,前后左右多路视频通过AHD传输到视频数据处理控制模块进行滤波、畸变、拼接最终形成俯视鸟瞰图,叠加3D原车专用车模型转换成LVDS信号发送到视频转换,最终匹配屏幕显示模块上进行显示,继电器负责将原车主机Lvds信号通路切换到视频转换通路。
进一步地,摄像采集模块包括四个专车专用摄像头,四个所述专车专用摄像头分别固定安装在车头、车尾、左右后视镜位置处,所述前摄像头设置在中网位置,所述左右摄像头设置在左右后视镜底盖位置处且垂直朝向地面设置,四个摄像头为安装在前后左右的四个专车专用摄像头,分别安装在车头、车尾、左右后视镜,其中前摄像头安装在中网位置,将摄像头用螺丝固定于卡扣支架,然后通过专用支架扣紧于中网,左右摄像头是螺丝固定在后视镜底盖,然后替换原车后视镜底盖,后视用螺丝固定在汽车尾盖拉手然后替换原车后盖拉手,这样安装不会破坏原车美观;
进一步地,CAN处理模块用于处理车辆本体的档位数据程序处理、转向灯数据程序处理、方向盘程序数据处理、雷达程序数据处理和车门车速数据处理;
请参阅图5:
方向盘转向数据:反映了方向盘从向左边打死,到向右边打死,一共2圈半的范围,方向盘的转动会时实时反映到原车的显示屏上,在倒车状态下,原车屏幕显示倒车后视视频以及轮胎轨迹图,随着方向盘的转动,视中的泊车图中轮胎轨迹图会显示车辆后轮后退的轨迹,为司机提供倒车帮助。全景小车的轨迹显示前后轮后退的轨迹,人性化的显示车将要走过的路径,为汽车司机行车提供很大的帮助,在前进状态下,原车屏幕全景图显示前进轮胎轨迹图,随着方向盘的转动,全景视中的轮胎轨迹图会显示车辆前进的轨迹,为司机提供前进帮助,MCU数据处理负责将原车操控CAN接收到数据通过处理直接转发给视频处理控制,同时将其他数据发送回到原车主机;
档位切换数据:控制着原车界面和360界面之间的切换,当司机开始倒车时,档位进入倒车档,原车显示屏自动切换到360界面。泊车图切换到后视摄像头画面,当完成倒车后,汽车档位从倒档切换到其他档位,系统延时5S后切换到原汽车系统画面;
信号灯数据:实现360前视、左视、右视直接的切换,360界面和原车界面的切换,当汽车打左转向灯原车显示画面切换到360界面,泊车图显示的是做摄像头画面,转向灯关掉自动切换到原车系统界面。当汽车打右转向灯时,原车显示画面切换到360界面,泊车图显示画面切换到左摄像头,转向灯消失自动切换到原车系统界面,当司机按双闪的时候,原车显示屏切换到360界面,泊车图显示前摄像头画面,可以实时监测前进路路况,当司机再次按两次双闪时,原车显示屏切换到原车系统界面;
雷达数据:分为前后左右4个方向,分辨反应汽车前左、前右、后左、后右4个角位周围障碍物的情况,当然也能反映正前方和正后方的障碍物情况,当各个方位有障碍物靠近时,根据远近程度,汽车屏幕上有可视化的不同颜色雷达波纹指示,根据距离的远近不同,雷达波纹的颜色也不同,有远近及颜色的变化,直观的反映了障碍物与车的距离,分析到车速数据,以上数据因为最终是以可视化的结果反映给用户,所以经过处理后的数据必须最终反馈到视频显示处理上。
这些数据主要是从原车CAN总线系统获取到的数据进行进一步的解析,然后对视频处理模块中的前后左右四个摄像头实现切换,轨迹线控制,画面切换。
请参阅图6,进一步地,数据处理模块包括视频数据处理控制模块和视频数据转换模块,所述视频数据控制模块用于将摄像采集模块传输的视频数据进行滤波、畸变、拼接,形成俯视鸟瞰图,所述视频数据转换模块用于将视频数据处理控制模块传输过来的lvds视频信号适配原车显示屏幕并叠加轨迹线,在开始将视频数据和原车数据传输在原车屏幕上时,数据信号首先进入原车主机中,通过使用解串器对原车主机进行视频数据进行解串,解串完毕后通过原车主机对视频CLK、HS、VS、DE等数据进行逻辑分析与转换,通过原车主机计算等到CLK、HS、VS、DE显示参数数据,同时将计算后的CLK、HS、VS、DE显示参数数据与原车主机本地系统中的内部存储的常用显示屏幕参数进行对比,并有原车主机判断视频参数数据是否为常用显示屏幕参数,如果复合要求视频数据为常用显示屏幕参数,之后对该显示屏幕参数进行校准,校准之后并匹配尝试连接,根据校准后的显示参数对视频处理控制模块输出的显示参数通过缩放、偏移最终形成和原车一样的显示屏幕参数,之后通过串行器将视频数据信号最终传输到原车显示屏上进行显示;若判断为非常用显示屏幕参数,即视频数据信号参数为新的显示屏幕参数,将参数通过原车主机上传到公司总部并通过人工校准,将校准后的参数传输至本地系统并保存为常用显示屏参数,之后再次根据校准后的显示参数对视频处理控制模块输出的显示参数通过缩放、偏移最终形成和原车一样的显示屏幕参数,之后通过串行器将视频数据信号最终传输到原车显示屏上进行显示;
进一步地,CAN总线控制模块与原车主机电性连接,所述显示屏幕模块包括触摸板控制模块。
本发明的使用过程如下:在使用本发明时通过在车辆本体的前后左右四个方向设置摄像头,可以将车辆四周的景象都摄录下来,然后通过数据处理模块将四个摄像头的影像信息合成鸟瞰视图,通过电子继电器将影响数据传递给屏幕显示模块,根据实用使用需求,在屏幕显示模块上显示一定的车辆附近的影响视角,通过在CAN总线系统添加CAN总线控制模块和CAN处理模块,CAN处理模块采集车辆本体的档位数据程序处理、转向灯数据程序处理、方向盘程序数据处理、雷达程序数据处理和车门车速数据处理,并且与数据处理模块配合使用在屏幕显示模块上增添了原车触控、旋钮控制,通过电子继电器将原车主机的LVDS信号和视频数据转换模块的LVDS信号进行切换,分别切换显示在显示屏幕模块上,泊车视图显示前摄像头画面,可以实时监测前进路路况。
以上所述,仅是本发明的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本发明加以修改或将其修改为等同的技术方案。因此,依据本发明的技术方案所进行的任何简单修改或等同置换,尽属于本发明要求保护的范围。
- 一种原车加装360度全景泊车系统的方法及系统
- 一种360度全景泊车辅助系统