基于霍夫变换及线性回归的目标边界检测方法及装置
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及图像处理技术领域,具体地涉及一种基于霍夫变换及线性回归的目标边界检测方法及一种基于霍夫变换及线性回归的目标边界检测装置。
背景技术
目前,具有AD(autonomobile driving,自动驾驶)功能或ADAS(AdvancedDriverAssistance System,高级驾驶辅助系统)的车辆已经开始投入市场,例如,2016年日产Serena可以在高速公路的单车道上行驶而无需驾驶员操纵。
现有技术中,支持AD/ADAS的传感器有雷达、激光雷达和视觉摄像机。其中,视觉摄像机具有像人一样获取二维图像的特点,其广泛应用于包括车道检测、物体检测、行人检测等领域,视觉摄像机利用图像处理从捕获的图像中进行对象检测等处理,从而实现对捕获到的图像中的物体和环境信息的提取。在对象检测过程中,通常使用霍夫变换进行目标的边缘线检测,霍夫变换能准确的对线性对齐的边缘点进行检测,但在实际检测中,由于边缘点不连续或边缘弯曲,霍夫变换往往不能检测到足够的峰值,从而无法准确检测出目标边缘。
发明内容
本发明实施方式的目的是提供一种基于霍夫变换及线性回归的目标边界检测方法及装置,以解决现有边缘检测中仅依靠霍夫变换,存在目标边缘无法被准确检测的问题。
为了实现上述目的,在本发明的第一方面,提供一种基于霍夫变换及线性回归的目标边界检测方法,所述方法包括:
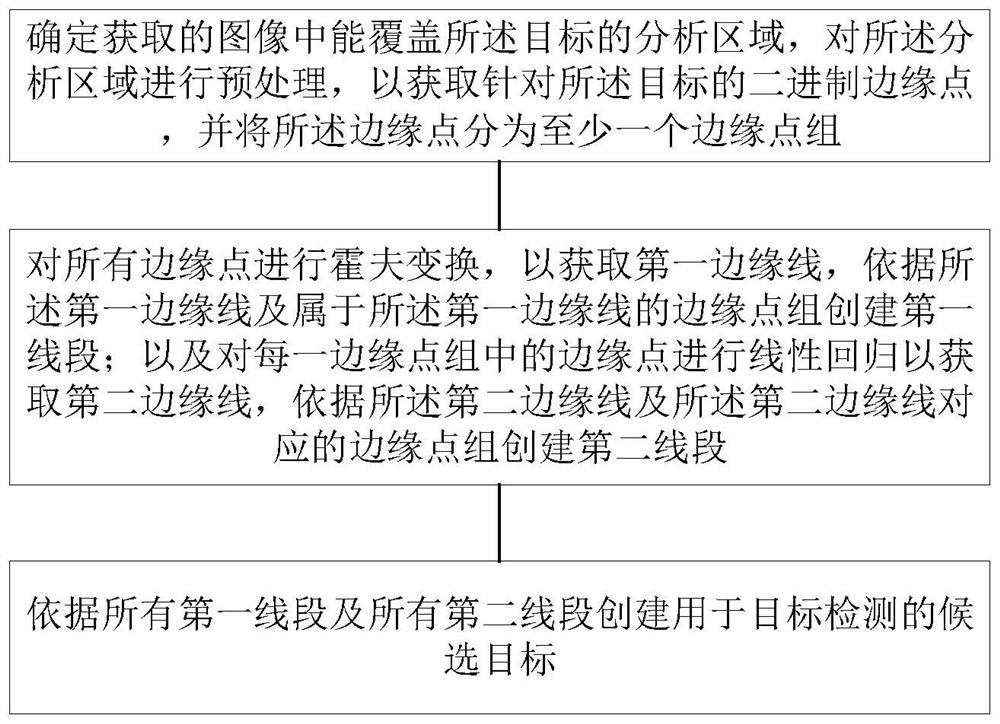
确定获取的图像中能覆盖所述目标的分析区域,对所述分析区域进行预处理,以获取针对所述目标的二进制边缘点,并将所述边缘点分为至少一个边缘点组;
对所有边缘点进行霍夫变换,以获取第一边缘线,依据所述第一边缘线及属于所述第一边缘线的边缘点组创建第一线段;以及
对每一边缘点组中的边缘点进行线性回归以获取第二边缘线,依据所述第二边缘线及所述第二边缘线对应的边缘点组创建第二线段;
依据所有第一线段及所有第二线段创建用于目标检测的候选目标。
可选地,所述方法还包括:
在将所述边缘点分为至少一个边缘点组之后,对所有边缘点组中的边缘点进行像素窄化处理,保留所述边缘点组中水平连续边缘点的中心边缘点,丢弃其余边缘点。
可选地,将所述边缘点分为至少一个边缘点组,包括:
基于八邻域将所述边缘点分为至少一个边缘点组。
可选地,所述对每一边缘点组中的边缘点进行线性回归以获取第二边缘线,包括:
若所述边缘点组满足预设条件,对所述边缘点组中的边缘点进行线性回归处理以得到第二边缘线;
所述预设条件包括所述边缘点组的长宽比和/或所述边缘点组中边缘点的数量。
可选地,所述对每一边缘点组中的边缘点进行线性回归以获取第二边缘线,包括:
对所述边缘点组中的边缘点进行线性回归处理以得到对应的线性回归线;
若所述线性回归线的标准差低于预设阈值,以所述线性回归线作为所述第二边缘线。
可选地,基于八邻域将所述边缘点分为至少一个边缘点组之后,所述方法还包括:
若存在在垂直方向上对齐的边缘点组,则将在垂直方向上对齐的边缘点组合并为一个边缘点组。
可选地,将在垂直方向上对齐的边缘点组合并为一个边缘点组,包括:
在垂直方向上对齐的边缘点组中:
若任一边缘点组的顶部与其相邻的边缘点组的底部的距离不大于距离阈值,则将该边缘点组与其相邻的边缘点组合并为一个边缘点组。
可选地,对每一边缘点组中的边缘点进行线性回归以获取第二边缘线,包括:
对每一边缘点组中的边缘点进行高阶回归以获取回归曲线,以获取到的回归曲线作为第二边缘线。
在本发明的第二方面,提供一种基于霍夫变换及线性回归的目标边界检测装置,所述装置包括:
边缘点提取模块,被配置为确定获取的图像中能覆盖所述目标的分析区域,对所述分析区域进行预处理,以获取针对所述目标的二进制边缘点,并将所述边缘点分为至少一个边缘点组;
边缘线提取模块,被配置为对所有边缘点进行霍夫变换,以获取第一边缘线,依据所述第一边缘线及属于所述第一边缘线的边缘点组创建第一线段;以及
对每一边缘点组中的边缘点进行线性回归以获取第二边缘线,依据所述第二边缘线及所述第二边缘线对应的边缘点组创建第二线段;
目标创建模块,被配置为依据所有第一线段及所有第二线段创建用于目标检测的候选目标。
可选地,所述装置还包括:
窄化处理模块,被配置为对所有边缘点组中的边缘点进行像素窄化处理,保留所述边缘点组中水平连续边缘点的中心边缘点,丢弃其余边缘点。
可选地,所述边缘点提取模块还被配置为:
基于八邻域将所述边缘点分为至少一个边缘点组。
可选地,所述边缘点提取模块还被配置为:
在基于八邻域将所述边缘点分为至少一个边缘点组之后,若存在在垂直方向上对齐的边缘点组,则将在垂直方向上对齐的边缘点组合并为一个边缘点组。
可选地,所述边缘点提取模块还被配置为:
在垂直方向上对齐的边缘点组中:
若任一边缘点组的顶部与其相邻的边缘点组的底部的距离不大于距离阈值,则将该边缘点组与其相邻的边缘点组合并为一个边缘点组。
可选地,所述边缘线提取模块,还被配置为:
若所述边缘点组满足预设条件,对所述边缘点组中的边缘点进行线性回归处理以得到第二边缘线;
所述预设条件包括所述边缘点组的长宽比和/或所述边缘点组中边缘点的数量。
可选地,所述边缘线提取模块,还被配置为:
对所述边缘点组中的边缘点进行线性回归处理以得到对应的线性回归线;
若所述线性回归线的标准差低于预设阈值,以所述线性回归线作为第二边缘线。
可选地,所述边缘线提取模块还被配置为:
对每一边缘点组中的边缘点进行高阶回归以获取回归曲线,以获取到的回归曲线作为第二边缘线。
在本发明的第三方面,提供一种汽车,包括上述的基于霍夫变换及线性回归的目标边界检测装置。
本发明上述技术方案通过对所有边缘点进行霍夫变换,同时对每个边缘点组中的边缘点进行线性回归以对目标边界进行提取,通过线性回归添加无法被霍夫变换检测到的边缘线,这样,通过霍夫变换和线性回归的结合,可以获得更可靠的边缘线,进而可获得更可靠的候选目标对象,通过本发明的方法可以有效提高目标边界检测的准确率,减少目标对象的丢失率,进而提高目标检测的成功率。
本发明实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本发明实施方式的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明实施方式,但并不构成对本发明实施方式的限制。在附图中:
图1是本发明优选实施方式提供的一种基于霍夫变换及线性回归的目标边界检测方法的方法流程图;
图2是本发明优选实施方式提供的纸板检测原始图像示意图;
图3是本发明优选实施方式提供的纸板检测分析区域示意图;
图4a是本发明优选实施方式提供的原始图像平面示意图;
图4b是本发明优选实施方式提供的霍夫平面示意图;
图4c是本发明优选实施方式提供的霍夫直方图;
图4d是本发明优选实施方式提供的估计线示意图;
图5是本发明优选实施方式提供的纸板右侧边缘点示意图;
图6是本发明优选实施方式提供的霍夫变换识别纸板右侧边缘线的示意图;
图7是本发明优选实施方式提供的线段创建示意图;
图8是本发明优选实施方式提供的线性回归添加纸板右侧边缘线的示意图;
图9是本发明优选实施方式提供的一种基于霍夫变换及线性回归的目标边界检测装置的装置示意框图。
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
如图1所示,在本发明的第一方面,提供一种基于霍夫变换及线性回归的目标边界检测方法,方法包括:
确定获取的图像中能覆盖目标的分析区域,对分析区域进行预处理,以获取针对目标的二进制边缘点,并将边缘点分为至少一个边缘点组;
对所有边缘点组中的边缘点进行霍夫变换,以获取第一边缘线,依据第一边缘线及属于第一边缘线的边缘点组创建第一线段;以及
对每一边缘点组中的边缘点进行线性回归以获取第二边缘线,依据第二边缘线及第二边缘线对应的边缘点组创建第二线段;
依据所有第一线段及所有第二线段创建用于目标检测的候选目标。
如此,本实施方式通过对所有边缘点进行霍夫变换,同时对每个边缘点组中的边缘点进行线性回归以对目标边界进行提取,通过线性回归添加无法被霍夫变换检测到的边缘线,这样,通过霍夫变换和线性回归的结合,可以获得更可靠的边缘线,进而可获得更可靠的候选目标对象,由于检测边界的性质不同,因此,通过本发明的方法可以有效提高目标边界检测的准确率,减少目标对象的丢失率,进而提高目标检测的成功率。
具体的,常规的目标检测过程包括:通过摄像头获取原始图像;对原始图像进行差分处理,经过差分运算和设置阈值得到二进制或三进制的差分图像;提取边缘点并根据边缘点创建目标的边缘线段;根据三元图像的正边缘线段和负边缘线段的组合或二元图像的线段来创建候选对象;对候选对象进行分析评估,以判断候选对象是否为待检查的目标。以检测道路中的纸板为例,首先通过设置在车辆内的摄像头捕获原始图像,原始图像如图2所示,图中圆圈部分为纸板,选择红色、绿色及蓝色中的一种颜色,确定分析区域,其中,分析区域应保证能覆盖被检测的目标,对分析区域的图像进行预处理,得到三元图像,分析区域如图3所示,图中圆圈部分为纸板的右边缘。基于得到的三元图像对边缘点进行边缘点组的划分,其中,边缘点组基于八邻域像素点来划分,即判断任意一个边缘点的八方向邻域内,是否存在另外的边缘点,若存在,则将其划分为一组,直至不存在八方向领域上互联的边缘点。将边缘点划分为至少一个边缘点组后,对所有边缘点进行霍夫变换运算来估计被检测目标,即纸板的边缘线。
其中,对分析区域的图像进行预处理包括对分析区域的图像进行差分处理以得到对应的二元/三元图像,在进行差分处理之前,还需要对原始图像进行平滑处理。同时,在目标检测中,目标的边缘应该是窄的,为了减少计算量,对边缘进行窄化处理是必要的,因此,本实施方式的方法还包括:在将边缘点分为至少一个边缘点组之后,对所有边缘点组中的边缘点进行像素窄化处理,例如,为了减少像素点,在水平方向上进行变窄,以便可以提取可靠的边缘点,并减少要处理的边缘点的数量以减少计算时间。对于各边缘点组中的边缘点,仅使用水平方向上连续像素中的中心像素,丢弃其余像素。其中,边缘点组中的任一边缘点与至少一个属于同一边缘点组中的其他边缘点在任一边缘点的八方向邻域上互联,需要注意的是,一组中的点基于八邻域连接,但有时会由于变窄而断开连接,但是,一组中的点最初是连接的。
霍夫变换的基本过程为:对边缘点应用霍夫变换,创建霍夫直方图,根据霍夫直方图中的峰值可以估算出边缘线。在霍夫变换过程中,需要将提取到的边缘点由笛卡尔平面转换到霍夫平面,即笛卡尔平面中的一条直线对应于霍夫平面中的一个点。
如图4a~图4d所示,为了检测由摄像头获取的原始图像平面中的边缘点构成的直线,如图4a所示为笛卡尔坐标系下的原始相机平面,通过曲线将原始图像平面中的每个边缘点(x,y)映射到霍夫平面ρ=xcosθ+ysinθ,霍夫平面被量化为由像素(θi,ρj)组成的格子,例如,每个像素对应一个格子;将映射到霍夫平面的曲线在格子中表示并计算通过每个像素的曲线数,如图4b中的交点(ρc,θc)=(105,45)表示有若干曲线通过该像素,每个格子中的累积数以霍夫平面的直方图表示,如图4c中的(ρc,θc)=(105,45)为霍夫平面的直方图中的一个峰值,则最大数量曲线通过的峰值点为估计的直线(ρc,θc)。通过霍夫变换能准确的判断某些边缘点是线性对齐的,霍夫变换准确的检测到了纸板的左侧边缘线,但是由于纸板的右侧边缘点组中的边缘点不是线性分布的,如图5所示,圈中的边缘点对应于纸板右侧边缘,该部分边缘点是非线性的,它们无法在霍夫直方图中创建高峰值,即,在对纸板右侧边缘对应的边缘点组进行霍夫变换时,无法在霍夫直方图中提取到足够多的高峰值,因此,霍夫变换无法准确检测到纸板的右侧边缘。如图6所示,霍夫变换过程中生成的霍夫线没有经过圈中纸板右侧边缘的边缘点,因此纸板的右侧边缘无法被霍夫变换检测到,其创建的候选对象无法被识别,即无法检测到纸板。
为了解决霍夫变换无法准确检测目标边界的问题,本实施方式通过对边缘点组中的边缘点进行线性回归处理以得到对应的线性回归线,从而在霍夫变换检测边缘线的基础上,添加线性回归线以辅助对目标的边界检测。其中,通过霍夫变换与线性回归两种方法进行线段估计的比较如表1所示。
表1
具体的,在对所有边缘点进行霍夫变换得到第一边缘线后,基于考虑第一边缘线及其所属的组对所有第一边缘线创建第一线段,并基于考虑第二边缘线及其所属的组对所有第二边缘线创建第二线段,删除第一线段与第二线段之间重叠的线段,从而创建线段的最终集合,进而能根据该线段的最终集合中的线段创建用于目标检测的候选目标,并根据其大小和位置判断候选目标是否为目标。以创建第一线段为例,通常通过确定边缘点所属的组及边缘点沿估计线的分布来确定线段,如图7所示,gr#1、gr#2及gr#3分别为一条第一边缘线上的三个边缘点组,其中,gr#1远离gr#2,因此,gr#1中的边缘点不被用于线段的创建,gr#2与gr#3距离较近,因此,gr#2与gr#3被用于创建线段,创建的第一线段如图7中加粗部分所示。经线性回归处理后,未被霍夫变换检测到的边缘线被准备的检测到,如图8所示,圈中竖直的线段为经线性回归生成的线段,经过添加线性回归线段后,纸板的右侧边缘被准确的检测到。即,对于所有边缘点,若每个边缘点均能通过霍夫变换在霍夫直方图上提取到足够的峰值,每个边缘点均能生成对应的第一边缘线,则以通过第一边缘线得到的所有第一线段构建目标的边界,以创建候选对象;若通过霍夫变换无法在霍夫直方图上提取到足够多的峰值,则通过线性回归拟合得到各边缘点组的第二边缘线,并通过第二边缘线得到的第二线段,以所有第一线段及所有第二线段共同构建目标边界,以创建候选对象,其中,候选对象的创建过程为现有技术,此处不再赘述。本实施方式中,将通过霍夫变换得到的线称为第一边缘线,将通过线性回归得到的线称为第二边缘线。
为了提高线性回归提取边缘线的准确性,对每一边缘点组中的边缘点进行线性回归以获取第二边缘线,包括:若边缘点组满足预设条件,对边缘点组中的边缘点进行线性回归处理以得到第二边缘线;其中,预设条件包括边缘点组的长宽比和/或边缘点组中边缘点的数量。在本实施方式中,按以下预设条件选择进行线性回归线提取的边缘点组:长宽比>2.5;像素点数≥图像垂直像素长度的1/5。进一步的,预设条件还可以包括边缘点组距离地面的垂直位置(边缘点的平均位置)<图像的中线,其具体取值可以根据摄像头的高度和俯仰角确定。在此基础上,对每一边缘点组中的边缘点进行线性回归以获取第二边缘线,包括:对边缘点组中的边缘点进行线性回归处理以得到对应的线性回归线;若线性回归线的标准差低于预设阈值,以线性回归线作为目标的第二边缘线。其中,线性回归可以使用二阶或三阶。对所有满足条件的边缘点组进行线性回归,得到满足条件的边缘点组的线性回归线并计算线性回归线的标准差σ,选择标准差σ<2.5的线性回归线作为目标边界的候选边缘线,进而能在边缘点非线性对齐的情况下,例如目标边缘不连续或弯曲的情况下,准确检测到霍夫变换无法检测到的边缘线。其中,对边缘点组的边缘点进行线性回归可以采用高阶回归模型获取回归曲线,并以获取到的回归曲线作为第二边缘线,线性回归处理是常规数学算法,本实施方式对边缘点的线性回归处理过程不再赘述。其中,在对边缘点组进行高阶回归以得到第二边缘线前,本实施方式的方法还包括:在基于八邻域将所述边缘点分为至少一个边缘点组之后,若存在在垂直方向上对齐的边缘点组,则将在垂直方向上对齐的边缘点组合并为一个边缘点组。
优选的,将在垂直方向上对齐的边缘点组合并为一个边缘点组,包括:在垂直方向上对齐的边缘点组中:若任一边缘点组的顶部与其相邻的边缘点组的底部的距离不大于距离阈值,则将该边缘点组与其相邻的边缘点组合并为一个边缘点组。例如,在基于八邻域得到的边缘点组中,存在3个在垂直方向上对齐的边缘点组gr#4、gr#5及gr#6,其中边缘点组gr#5的顶部与边缘点组gr#4的底部在垂直方向上的距离小于预设的距离阈值,则将gr#4与gr#5合并为一个边缘点组。
如图9所示,在本发明的第二方面,提供一种基于霍夫变换及线性回归的目标边界检测装置,装置包括:
边缘点提取模块,被配置为确定获取的图像中能覆盖目标的分析区域,对分析区域进行预处理,以获取针对目标的二进制边缘点,并将边缘点分为至少一个边缘点组;
边缘线提取模块,被配置为对所有边缘点进行霍夫变换,以获取第一边缘线,依据所有第一边缘线及每条第一边缘线所属的边缘点组创建第一线段;以及
对每一边缘点组中的边缘点进行线性回归以获取第二边缘线,依据所有第二边缘线及每条第二边缘线所属的边缘点组创建第二线段;
目标创建模块,被配置为依据所述第一线段及所述第二线段创建用于目标检测的候选目标。
可选地,装置还包括:
窄化处理模块,被配置为对所有边缘点组中的边缘点进行像素窄化处理,以保留所述边缘点组中水平连续边缘点的中心边缘点,丢弃其余边缘点。
可选地,边缘点提取模块还被配置为:
基于八邻域将所述边缘点分为至少一个边缘点组,以使得边缘点组中的任一边缘点与至少一个属于同一边缘点组中的其他边缘点在任一边缘点的八方向邻域上互联。
可选地,所述边缘点提取模块还被配置为:
在基于八邻域将所述边缘点分为至少一个边缘点组之后,若存在在垂直方向上对齐的边缘点组,则将在垂直方向上对齐的边缘点组合并为一个边缘点组。
可选地,所述边缘点提取模块还被配置为:
在垂直方向上对齐的边缘点组中:
若任一边缘点组的顶部与其相邻的边缘点组的底部的距离不大于距离阈值,则将该边缘点组与其相邻的边缘点组合并为一个边缘点组。
可选地,边缘线提取模块,还被配置为:
若边缘点组满足预设条件,对边缘点组中的边缘点进行线性回归处理以得到第二边缘线;
预设条件包括边缘点组的长宽比和/或边缘点组中边缘点的数量。
可选地,边缘线提取模块,还被配置为:
对边缘点组中的边缘点进行线性回归处理以得到对应的线性回归线;
若线性回归线的标准差低于预设阈值,以线性回归线作为第二边缘线。
可选地,边缘线提取模块还被配置为:
对每一边缘点组中的边缘点进行高阶回归以获取回归曲线,以获取到的回归曲线作为第二边缘线。
在本发明的第三方面,提供一种汽车,包括上述的基于霍夫变换及线性回归的目标边界检测装置。
综上所述,本实施方式通过对各边缘点进行霍夫变换以对目标边界进行初步提取,并对可能无法通过霍夫变换提取到目标边界的边缘点组进行线性回归以对目标边界进行二次提取,通过线性回归添加可能无法通过霍夫变换检测到的边缘线,能有效的提高目标边界检测的准确率,进而提高目标检测的成功率。由于边缘点的分布对霍夫变换具有较大影响,霍夫变换能非常准确的对线性对齐的边缘点进行边缘提取,但若边缘点不是线性对齐的,则无法在霍夫直方图中检测到高峰值,进而无法对非连续或弯曲的边缘进行准确的检测;而对于线性回归来说,在边缘非连续或弯曲的情况下,可以通过线性回归或更高阶的回归来辅助检测边缘线,从而有效的提高了目标边界的检测准确率。
以上结合附图详细描述了本发明的可选实施方式,但是,本发明实施方式并不限于上述实施方式中的具体细节,在本发明实施方式的技术构思范围内,可以对本发明实施方式的技术方案进行多种简单变型,这些简单变型均属于本发明实施方式的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本发明实施方式对各种可能的组合方式不再另行说明。
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明实施方式的思想,同样应当视为本发明实施方式所公开的内容。
- 基于霍夫变换及线性回归的目标边界检测方法及装置
- 基于边界紧约束网络的车辆目标位姿检测方法、装置及存储介质