利用鱿鱼夹子的袢光学器件管理系统
文献发布时间:2023-06-19 11:57:35
背景技术
人眼睛可能患上许多疾病,导致轻度恶化以至完全丧失视力。虽然隐形眼镜和眼镜可以弥补一些疾病,但其他的则可能需要眼科手术。通常,眼科手术可以被分类为比如玻璃体视网膜手术等后段手术和比如白内障手术等前段手术。玻璃体视网膜手术可以解决许多不同的眼睛病情,包括但不限于黄斑变性、糖尿病视网膜病变、糖尿病性玻璃体出血、黄斑裂孔、视网膜脱落、视网膜前膜和巨细胞病毒视网膜炎。
对于白内障手术,手术可能需要在眼睛中形成切口并将工具插入眼睛内,以用人工晶状体(“IOL”)替换浑浊的天然晶状体。切口部位较大可能会导致术后愈合时间较长。为了减少这种愈合时间,典型的操作程序已经转变为在眼睛中形成约2毫米大小的切口。虽然这种较小大小的切口可以减少术后愈合时间,但随着切口大小的不断缩小,可能会出现比如插入工具的大小和功能等问题。典型地,插入工具可以预装载有IOL,一旦去除了浑浊的天然晶状体,就可以将IOL插入患者的眼睛中。插入工具可以包括用于将IOL从插入工具的管嘴中推出的柱塞。柱塞可以具有附加功能,包括IOL的袢收拢和折叠。一旦形成切口,就可以通过该切口将插入工具插入眼睛中,并且可以通过致动柱塞来将已折叠的IOL分配到眼睛中。当切口部位减小时,插入工具的管嘴的大小可能相应地减小。
发明内容
在示例性方面,本披露涉及一种袢光学器件管理系统。所述袢光学器件管理系统可以包括壳体。所述袢光学器件管理系统可以进一步包括板,其中,所述板设置在所述壳体内。所述袢光学器件管理系统可以进一步包括夹子,所述夹子接合所述壳体中的所述板,其中,所述夹子包括夹子主体和从所述夹子主体延伸的多个腿。
在另一个示例性方面,本披露涉及一种插入工具。所述插入工具可以包括驱动系统,所述驱动系统包括主体。所述插入工具可以进一步包括柱塞,所述柱塞设置在所述驱动系统中。所述插入工具可以进一步包括管嘴。所述插入工具可以进一步包括袢光学器件管理系统,所述袢光学器件管理系统定位在所述管嘴与所述驱动系统之间、用于接纳所述柱塞的远侧端头。所述袢光学器件管理系统可以包括壳体。所述袢光学器件管理系统可以进一步包括板,所述板设置在所述壳体中。所述袢光学器件管理系统可以进一步包括夹子,所述夹子接合所述壳体中的所述板,其中,所述夹子包括夹子主体和从所述夹子主体延伸的多个腿。
在另一个示例性方面,本披露涉及一种递送人工晶状体的方法。所述方法可以包括向夹子施加外力以在壳体中压缩所述夹子,其中,所述壳体包含所述人工晶状体。所述人工晶状体可以包括光学器件和从所述光学器件的周边延伸的袢。所述方法可以进一步包括当所述夹子被压缩时使所述袢与所述夹子接合以使所述袢折叠到所述人工晶状体上。所述方法可以进一步包括使所述夹子背离所述人工晶状体移动以释放施加到保持所述人工晶状体的板上的力,以使所述板和所述人工晶状体卷起。所述方法可以进一步包括致动驱动系统以将所述人工晶状体穿过管嘴分配到眼睛中。
不同方面可以包括以下特征中的一个或多个。所述壳体可以包括通孔,所述通孔从所述壳体的第一端到所述壳体的第二端横穿所述壳体的长度。所述板可以设置在所述通孔中。所述板可以是弹性的,本文中所述夹子接合所述板以防止所述板返回到原始位置。所述板可以包括选自由弹簧钢、镍钛诺、聚酰亚胺、硅树脂、带涂层的金属及其组合组成的组的材料。所述袢光学器件管理系统可以包括设置在所述板的晶状体表面上的人工晶状体,其中,所述人工晶状体可以包括光学器件和从所述光学器件的周边延伸的袢。所述壳体可以包括在所述壳体的侧面中的开口,其中,所述开口包括中心狭槽和一对狭槽,其中,所述中心狭槽设置在这对狭槽之间,其中,所述夹子延伸穿过所述开口到所述壳体中的通孔中。所述多个腿可以包括延伸穿过所述壳体中的这对狭槽以将所述板保持在位的外支撑腿和延伸穿过中心狭槽的内腿。所述夹子主体可以包括弹簧部分和从所述弹簧部分延伸的相对的抓握部分。所述夹子可以进一步包括从所述夹子主体延伸的中心柱,其中,所述中心柱将所述夹子对准在所述壳体的这对狭槽内。所述柱塞可以可操作以在所述驱动系统被致动以从所述管嘴分配可设置在所述袢光学器件管理系统中的人工晶状体时接合所述人工晶状体。所述驱动系统可以包括杠杆和气动系统。所述夹子可以包括从所述夹子主体延伸的多个腿。所述多个腿可以延伸到所述袢光学器件管理系统的壳体中。施加外力可以使所述腿的至少一部分更靠近地压缩在一起。所述多个腿可以包括内腿。所述内腿可以接合袢,以使所述袢折叠在所述人工晶状体的顶部上。所述多个腿可以包括外支撑腿,其中,使所述夹子背离所述人工晶状体移动使所述外支撑腿的脚部从与所述板的接合中释放,使得所述板卷到自身上。致动所述驱动系统可以使柱塞将所述人工晶状体穿过所述管嘴移出所述壳体。
应理解的是,以上一般性说明以及以下详细说明在本质上都是示例性和解释性的,并且旨在提供对本披露的理解而不限制本披露的范围。就此而言,通过以下详细说明,本披露的附加方面、特征以及优点对于本领域技术人员而言将是明显的。
附图说明
这些附图展示了本披露的一些实施例的某些方面,并且不应该用于限制或限定本披露。
图1展示了可操作以将IOL递送到眼睛中的示例插入工具的示意图。
图2A展示了正从插入工具引入IOL的眼睛。
图2B展示了图2A中所示的眼睛,其中IOL被定位在眼睛的囊袋内并且插入工具从眼睛中移除。
图3展示了可操作以将IOL递送到眼睛中的另一个示例插入工具的立体图。
图4展示了图3的插入工具的俯视图。
图5展示了图3的插入工具的侧视图。
图6是图3的插入工具的远端的详细视图。
图7展示了包括夹子的示例袢光学器件管理系统。
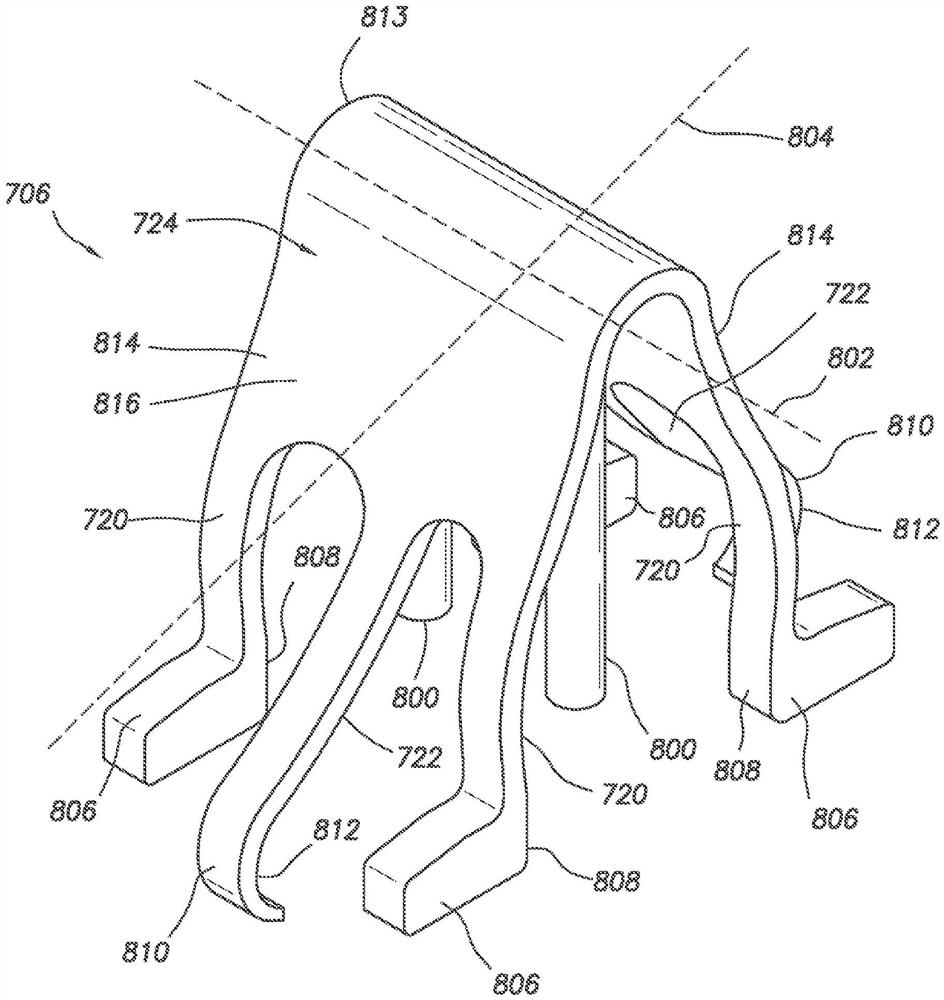
图8展示了图7的示例袢光学器件管理系统的夹子。
图9展示了图7的示例袢光学器件管理系统的处于第一位置的板。
图10展示了图7的示例袢光学器件管理系统的处于第二位置的板。
图11展示了图7的示例袢光学器件管理系统的截面视图。
图12展示了插入工具的具有图7的示例袢光学器件管理系统的端部。
具体实施方式
出于促进对本披露的原理的理解的目的,现在将参考附图中展示的实现方式,并且将使用具体语言来描述它们。然而,应当理解,可以并非旨在限制本披露的范围。本披露所涉及的技术领域内的技术人员通常完全能够想到对于所描述的装置、器械、方法的任何改变和进一步的修改,以及本披露的原理的任何进一步应用。具体地,完全可以设想到,参考一个或多个实现方式描述的特征、部件和/或步骤可以与参考本披露的其他实现方式描述的特征、部件和/或步骤相组合。为简单起见,在一些情况下,在整个附图中,可以使用相同的附图标记来指代相同或相似的部分。
本文描述的示例实施例总体上涉及眼睛手术。更具体地,示例实施例总体上涉及用于将人工晶状体(“IOL”)插入眼睛中的系统、方法和装置。实施例可以包括用于准备IOL并将其递送到患者的眼睛中的插入工具,该插入工具包括柱塞、管嘴和袢光学器件管理系统。在一些实施例中,袢管理系统可以折叠IOL并收拢IOL的一个或多个袢。袢从IOL的光学器件延伸,并在将IOL设置在眼睛的囊袋内时使其稳定。在准备好IOL之后,柱塞将IOL推动穿过插入工具并从管嘴中推出。
图1展示了插入工具100的示意图。在一些实施例中,插入工具100可以包括驱动系统102、柱塞104、袢光学器件管理系统(可互换地称为“HOMS”)106和管嘴108。驱动系统102可以是任何可操作以致动柱塞104的系统或部件组合。例如,驱动系统102可以利用杠杆和/或气动系统;手动驱动的系统或部件;机电系统;液压系统;或可操作以驱动柱塞104前进、部分前进或从插入工具100完全递送IOL 110的其他装置。柱塞104联接到驱动系统102。驱动系统102可操作以致动柱塞104。例如,驱动系统102可以通过例如电气、机械、液压、气动、其组合或以其他某种方式来提供动力。响应于驱动系统102,柱塞104移动穿过HOMS 106。HOMS 106可以位于驱动系统102与管嘴108之间。在替代实施例中,HOMS 106可以设置在插入工具100内的其他位置。在一些实施例中,HOMS 106可以包含处于展开位置的IOL 110。
驱动系统102可以是任何可操作以使IOL 110前进穿过插入工具100的系统、部件或部件组。例如,驱动系统102包括柱塞,在图1中示意性地示出为柱塞104,该柱塞可操作以接合设置在插入工具100内的IOL 110,并使IOL 110在插入工具100内前进。在一些情况下,柱塞104可操作以使IOL从插入工具100排出。
在一些情况下,驱动系统102可以是手动驱动的系统。即,在一些情况下,使用者施加力以使驱动系统102进行操作。示例驱动系统102包括柱塞104,该柱塞可被使用者直接地或间接地手动接合以推动柱塞1044穿过插入工具100。当前进时,柱塞104接合IOL 110并使IOL 110前进穿过插入工具100,这还可以包括使IOL 110从插入工具100排出。手动IOL插入工具的非限制性示例在美国专利申请公开号2016/0256316中示出,其全部内容通过援引以其全文并入本文。根据其他实现方式,驱动系统102可以是自动化系统。示例自动化驱动系统在美国专利号8,808,308、美国专利号8,308,736和美国专利号8,480,555中示出,每个专利的全部内容通过援引以其全文并入本文。更进一步,在本披露范围内的其他自动化驱动系统在美国专利号8,998,983和美国专利申请公开号2017/0119522中描述,每个文件的全部内容通过援引以其全文并入本文。虽然提供了示例驱动系统作为示例,但这些系统并非旨在进行限制。而是,任何可操作以使IOL 110前进的部件、部件组、系统、装置、机构或其组合都在本披露的范围内。
如图1所示,IOL 110是单件式IOL,其包括光学器件114和从光学器件114的相反侧延伸的袢112。例如,在图1所示的示例IOL 110中,袢112沿着光学器件114的外周边相对于彼此成180°设置。然而,其他类型的IOL也在本披露的范围内。例如,也可以使用多件式IOL,其中光学器件和一个或多个袢是单独的部件。
IOL 110的形状可以类似于眼睛(例如,图2A所示的眼睛200)的天然晶状体的形状。IOL 110可以由多种材料制成,包括但不限于硅树脂、丙烯酸和/或其组合。还可以设想其他材料。袢112从光学器件114的周边延伸,并且当将IOL 110设置在眼睛内时起到使其稳定的作用。
在一些情况下,HOMS 106可以被致动以将袢112收拢在光学器件114上并且将光学器件114折叠。例如,HOMS 106可以操作以将袢112折叠在光学器件114上并且将光学器件114折叠在已折叠的袢112上或其周围。在116处以折叠构型示出了IOL 110。光学器件114的折叠构型116可以包括相对于光学器件114折叠的一个或多个袢112,并且在一些情况下,光学器件114相对于一个或多个袢112折叠。一旦HOMS 106已经折叠了IOL 110,就可以使柱塞104前进穿过HOMS 106。当柱塞104移动穿过HOMS 106时,柱塞104将已折叠的IOL 110从HOMS 106移位。例如,柱塞104可以将已折叠的IOL 110推入管嘴108中并将其推动穿过管嘴。
图2A展示了正用插入工具100进行手术的患者的眼睛200。如图所示,插入工具100将已折叠的IOL 110分配到患者的眼睛200中。在一些实施例中,例如,由外科医生在眼睛200中形成切口202。例如,在一些情况下,切口202可以穿过眼睛200的巩膜204形成。在其他情况下,切口可以在眼睛200的角膜209中形成。切口202的大小可以被设置为允许插入插入工具100的一部分,以便将已折叠的IOL 110递送到囊袋208中。例如,在一些情况下,切口202的大小可以具有小于约2000微米(2毫米)的长度。在其他情况下,切口202的长度可以为从约0微米至约500微米、从约500微米至约1000微米、从约1000微米至约1500微米、或从约1500微米至约2000微米。
在形成切口202之后,通过切口将插入工具100插入眼睛200的内部部分206中。插入工具100被致动以将已折叠的IOL 110分配到眼睛200的囊袋208中。在分配后,已折叠的IOL 110恢复到初始展开状态,并且IOL 110安置在眼睛200的囊袋208内,如图2B所示。囊袋208将IOL 110保持在眼睛200内相对于眼睛200的关系使得光学器件114使指向视网膜(未示出)的光折射。IOL 110的袢112接合囊袋208以将IOL 110固定在其中。在将IOL 110分配到囊袋208中之后,通过切口202将插入工具100从眼睛200中移除,并且允许眼睛200在一段时间内愈合。
图3至图5展示了示例插入工具100,该示例插入工具可操作以将IOL递送到眼睛中(例如,图2A和2B中所示的眼睛200中的IOL 110)。如图所示,插入工具100包括驱动系统102、袢光学器件管理系统106和管嘴108。插入工具100还可以包括柱塞,该柱塞可以类似于图1所示的柱塞104。在一些情况下,柱塞104可以被致动以使IOL(例如,其可以类似于图1所示的IOL 110)在插入工具100内前进,并且在一些情况下,从插入工具100分配IOL 110。
参考图3,驱动系统102包括主体302和可以枢转地联接到主体302的杠杆304。管嘴108联接到主体302的远端308。HOMS 106设置在主体302与管嘴108之间。在一些情况下,管嘴108可以一体地连接到主体302。在其他情况下,管嘴108可以与主体302分离,并且可以经由互锁关系联接到主体302。在一些情况下,HOMS 106和管嘴108可以一体地形成。在其他情况下,HOMS 106、管嘴108和主体302可以一体地形成。
在一些情况下,主体302可以具有细长的伸长形状。在一些情况下,主体302可以具有第一部分310和第二部分312。在一些情况下,第二部分312可以至少部分地设置成覆盖在第一部分310上。在所示的示例中,第二部分312包括多个孔口314。形成在第一部分310上的多个突起316被接纳到孔口314中以连结第一部分310和第二部分312。突起316可以与孔口314形成互锁配合。然而,图3至图5所示的示例插入工具100的主体302的构造仅是非限制性示例。在一些情况下,主体302可以是单一整体件。在一些情况下,主体302可以包括一个或多个圆柱形件。此外,主体302可以以任何期望的方式由任意数量的部件构造而成。
参考图3至图5,主体302还包括浮雕318、319和320。浮雕318、319和320是形成在主体302中的浅凹部,以容纳例如使用者的一个或多个手指。浮雕318、319和320中的一个或多个可以包括纹理化表面322,所述纹理化表面可以向使用者提供对插入工具100的改进抓握和控制。如图3和图5所示,浮雕318可以包括纹理表面322。然而,范围可以并不限于此。而是,浮雕318、319和320中的任一个、全部或没有一个可以包括纹理化表面322。类似地,杠杆304也可以包括纹理化表面324。然而,在一些情况下,杠杆304可以不包括纹理化表面。
参考图3,管嘴108包括限定了开口328的远侧端头326。管嘴108还包括向外展开部分或伤口防护件330。远侧端头326可以适于插入到形成在眼睛中的切口(比如在图2A和图2B所示的眼睛200中的切口202)中,以便将已折叠的IOL递送到其中。伤口防护件330可以包括端面332,该端面可操作以接触外表面,以便限制远侧端头326穿透眼睛200所到达的深度。在一些实施例中,可以省略伤口防护件330。
在一些实施例中,插入工具100可以是预装载的。即,当被提供给最终使用者时,插入工具100可以包括设置在其中的IOL。在一些情况下,IOL可以以展开状态设置在插入工具100内,并准备好被递送到患者中。使插入工具100预装载有IOL减少了使用者在将IOL递送到患者中之前所必须执行的步骤数量。例如,预装载的插入工具消除了使用者否则为使插入工具装载IOL所需执行的任何步骤。通过减少步骤数量,可以减少与将IOL递送到患者中相关联的错误和风险。进一步地,还可以减少递送IOL所需的时间量。在一些实施例中,IOL可以被预装载到袢光学器件管理系统600中。
图6展示了具有袢光学器件管理系统106的示例插入工具100的特写视图。HOMS106可操作以折叠IOL。例如,在一些情况下,HOMS 106可以可操作以将IOL从不受力状态折叠至完全折叠的构型,例如如图1所示。在折叠期间,HOMS 106可以将袢112收拢或折叠在IOL 110的光学器件114上、以及将光学器件114的边缘折叠在已收拢的袢112上,从而捕获袢112并且由此将IOL 110放置成折叠构型,例如如图1所示。
如图3至图6所示,例如,HOMS 106的大小被设置为与插入工具100的大小相称。即,HOMS 106具有紧凑的大小,以避免或限制在将IOL插入眼睛中时对外科医生视野的阻塞量。然而,本披露的范围并不限于此。而是,在一些情况下,袢光学器件管理系统的大小和/或形状可以被选择为任何期望的大小或形状。进一步地,虽然HOMS 106被示出为设置在插入工具100的远端,但袢光学器件管理系统106可以设置在插入工具100内或沿着其的任何地方。在一些实施例中,HOMS 106可以设置在管嘴108与驱动系统102之间。
在图3至图6的所示示例中,HOMS 106设置在主体302的远端308与管嘴108之间。在一些情况下,HOMS 106可以可移除地联接到管嘴108和/或驱动系统102。例如,HOMS 106可以通过使用紧固件或粘合剂可移除地联接到主体302。在又其他实现方式中,HOMS 106可以通过卡扣配合接合或任何其他期望的连接方法联接到主体302。非限制地,示例紧固件可以包括螺母和螺栓、垫圈、螺钉、销、插口、杆和螺柱、铰链和/或其任何组合。
图7展示了示例袢光学器件管理系统106。在所示的示例中,HOMS 106包括壳体702、板704、和夹子706。壳体702可以是用于要在插入工具100内被操纵的IOL 110(例如,图1所示)的保护性覆盖物。壳体702可以由比如金属、非金属、聚合物、陶瓷和/或其组合等材料制成。壳体702可以具有用于容纳IOL(比如图1所示的IOL 110)的任何合适的大小和/或形状。例如但不限于,壳体702可以被成形为使得壳体702的全部或一部分可以具有为圆形、椭圆形、三角形、矩形、正方形、六边形和/或其组合的截面形状。在一些实施例中,壳体702的全部或一部分可以具有矩形截面形状。壳体702包括通孔708,该通孔从壳体702的第一端710到壳体702的第二端712横穿整个长度。通孔708限定了柱塞104前进穿过以接合IOL 110并且驱动IOL 110穿过HOMS 106(如图1所示)的路径。在一些实现方式中,如图1所示,柱塞104继续驱动IOL 110穿过插入工具100的管嘴108,并且使IOL 110从插入工具100排出。在图8所示的示例中,通孔708具有矩形截面。然而,本披露的范围并不限于此。在其他实现方式中,通孔708的截面形状可以是U形、圆形、卵形、矩形、正方形、三角形、多边形或任何其他截面形状。
另外,可以有一个或多个开口,图7中示出为中心狭槽714和一对狭槽715,设置在壳体702的一个或多个侧面716上。如图所示,中心狭槽714和这对狭槽715是平行的并且沿与通孔708相同的方向形成在壳体702中。另外,这对狭槽715设置在中心狭槽714的两侧。中心狭槽714和这对狭槽715可以设置在壳体702的一个或多个侧面716中的任一个侧面上和/或在壳体702的一个或多个侧面716中的多个侧面上。非限制地,可以有单个中心狭槽714和每对狭槽715中的两个或更多个单独的狭槽。中心狭槽714和这对狭槽715提供从壳体702的外部到通孔708的通路。
板704设置在通孔708中。板704具有其上设置有IOL(比如图1所示的IOL 110)的晶状体表面718。板704可以卷起IOL 110,使得IOL 110折叠到自身上。板704可以由比如形状记忆材料等弹性材料制成。合适的材料可以包括但不限于非金属、聚合物、陶瓷和/或其组合。非限制地,板704可以由弹簧钢、镍钛诺、聚酰亚胺、硅树脂、带涂层的金属、和/或类似物制成。板704可以具有用于保持IOL 110的任何合适的大小和/或形状。例如但不限于,板704可以被成形为使得板704的全部或一部分可以具有为圆形、椭圆形、三角形、矩形、正方形、六边形和/或其组合的截面形状。在其他实施例中,板704的全部或一部分可以具有矩形截面形状,以用于放置在通孔708中。
在实施例中,夹子706与壳体702内的板704可移除地接合。夹子706将板704保持为使得晶状体表面718在壳体702的通孔708内是平坦的。夹子706被称为“鱿鱼”,因为它包括多个腿,图7中示出为外支撑腿720和内腿722。夹子706包括夹子主体724,外支撑腿720和内腿722从该夹子主体延伸。夹子主体724以铰链状方式联接外支撑腿720和内腿722,使得夹子主体724的柔性压缩使外支撑腿720和内腿722更靠近地压缩在一起。如图所示,外支撑腿720延伸到这对狭槽715中,并且内腿722延伸到中心狭槽714中。在壳体702中,外支撑腿720接合板704。外支撑腿720将板704保持在平坦位置。在一些情况下,板704倾向于朝里卷到或折叠到自身上。这可能是由于板704的制造方式,和/或板704可能已被调节为通过外力而朝里卷到或折叠到自身上。通过将外支撑腿720设置在壳体702内,外支撑腿720接合板704并且防止板704移动。夹子706可以由比如金属、非金属、聚合物、陶瓷和/或其组合等材料制成。非限制地,夹子706可以由比如聚丙烯、聚碳酸酯、和/或类似物等医学级塑料制成。夹子706可以具有任何大小和/或形状。例如但不限于,夹子706可以被成形为使得夹子706的全部或一部分可以具有为圆形、椭圆形、三角形、矩形、正方形、六边形和/或其组合的截面形状。
图8是夹子706的立体图。如图所示,夹子706包括外支撑腿720、内腿722、和夹子主体724。如图所示,外支撑腿720从夹子主体724延伸。在一些实施例中,可以有四个外支撑腿720。然而,实施例可以包括多于或少于四个的外支撑腿720。在一些示例中,有两个外支撑腿720设置在夹子706的一侧上,并且有两个外支撑腿720设置在夹子706的另一侧上,其中,每个外支撑腿720与另一个外支撑腿720的位置关于夹子706的X轴802和夹子706的Y轴804映出。外支撑腿720为夹子706提供结构支撑和稳定性。每个外支撑腿720可以联接有脚部806。如图所示,脚部806可以联接到每个外支撑腿720的远端808。脚部806可以一体地连接到每个外支撑腿720。在其他情况下,脚部806可以与外支撑腿720分离,并且可以经由互锁关系联接到外支撑腿720。在一些情况下,外支撑腿720和脚部806可以一体地形成。
另外,夹子706包括多个内腿722。如图所示,有两个内腿722。然而,取决于例如特定的应用,夹子706可以包括多于或少于两个的内腿722。每个内腿722设置在两个外支撑腿720之间。在一些实施例中,每个内腿722处于关于夹子706的X轴802映出的相同的相对位置。内腿722各自在每个内腿722的远端812处包括弯曲部分810。
在一些情况下,夹子706包括多个中心柱800。如图所示,有两个中心柱800。然而,取决于例如特定的应用,夹子706可以包括多于或少于两个的中心柱800。在一些实施例中,每个中心柱800处于关于夹子706的Y轴804映出的相同的相对位置。中心柱800可以具有任何大小和/或形状。例如但不限于,中心柱800可以被成形为使得中心柱800的全部或一部分可以具有为圆形、椭圆形、三角形、矩形、正方形、六边形和/或其组合的截面形状。在其他实施例中,中心柱800的全部或一部分可以具有圆形截面形状。中心柱800将夹子706与壳体702的这对狭槽715(例如,参考图7)对准。中心柱800为夹子706提供额外的结构支撑。中心柱800也用于在致动HOMS 106(例如,参考图1)之前将IOL 110(例如,参考图1)保持在静止位置。
夹子706的夹子主体724可以具有任何大小和/或形状。例如但不限于,夹子主体724可以被成形为使得夹子主体724的全部或一部分可以具有为圆形、椭圆形、三角形、矩形、正方形、六边形和/或其组合的截面形状。在其他实施例中,夹子主体724的全部或一部分可以是U形的。然而,夹子主体724的实施例也可以是c形、v形或以其他方式形成的,以用于使夹子主体724以铰链状方式联接外支撑腿720和内腿722,使得夹子主体724的压缩使外支撑腿720和内腿722更靠近彼此地压缩。夹子主体724可以关于X轴802和/或Y轴804是对称或不对称的。在一些情况下,夹子主体724为操作者提供一个或多个抓握表面816。如图所示,夹子主体724包括弹簧部分813和包括抓握表面816的相对的抓握部分814。相对的抓握部分814从弹簧部分813延伸。如图所示,中心柱800从弹簧部分813延伸。外支撑腿720和内腿722从抓握部分814延伸。在操作中,夹子主体724由比如压缩力等力致动。例如,该力可以通过将抓握部分814挤压在一起来压缩夹子主体724,这使外支撑腿720和/或内腿722在与作用在夹子主体724上的力的方向相同的运动路径中平移。在示例中,夹子主体724使外支撑腿720和内腿722偏置,使得当力被移除时,外支撑腿720和内腿722返回到其原始位置。
图9是板704的立体图。如图所示,板704包括基部900和侧壁902。基部900具有纵向轴线901。基部900包括晶状体表面718。基部900还包括端部904和在端部904之间延伸的侧向侧面906。侧壁902从侧向侧面906向上延伸。如图所示,侧壁902在端部904之间延伸整个长度,但是实施例可以包括在端部904之间的长度的一部分延伸的侧壁902。如前所述,板704可以倾向于朝里卷到或折叠到自身上。这可能是由于板704的制造方式,和/或板704可能已被调节为通过外力而朝里卷到或折叠到自身上。图9展示了处于第一位置的板704。如图所示,基部900在第一位置是大致平坦的。可以向基部900施加力以维持第一位置。板704可以具有第二位置,该第二位置是板704的不受力或预变形的位置。板704可以是弹性的,使得当力被移除时,板返回到第二位置。当力被移除时,板704朝里卷到或折叠到自身上成第二位置,如图10所示。在所示的实施例中,板704围绕基部900的纵向轴线901卷起。
图11展示了沿线11-11截取的图7的袢光学器件管理系统106的截面视图。如图所示,HOMS 106包括壳体702、板704、和夹子706。在示例中,IOL 110设置在壳体702的通孔708中。如前所讨论的,IOL 110可以包括光学器件114和袢112。IOL 110设置在板704的晶状体表面718上。IOL 110可以处于展开状态,其中袢112背离光学器件114延伸。在一些情况下,板704可以倾向于通过外力而朝里卷到或折叠到自身上。夹子706被定位为向板704施加力,从而防止板704朝里卷到或以其他方式折叠到自身上。如图所示,夹子706包括从夹子主体724延伸的外支撑腿720和内腿722。外支撑腿720延伸到这对狭槽715(例如,图7所示)中,并且内腿722延伸到中心狭槽714(例如,图7所示)中,进入通孔708中。每个外支撑腿720联接有脚部806。脚部806接合板704,从而将该板保持在第一位置(例如,如图9最佳所示)。在一些实施例中,脚部806接合晶状体表面718。在其他情况下,脚部806接合板704的侧壁902。
现在将更详细地描述袢光学器件管理系统106的操作。参考图11,HOMS 106可以预装载有IOL 110。如图所示,IOL 110设置在壳体702中的板704上。例如,操作者通过向夹子706的夹子主体724施加力来致动夹子706。该力压缩夹子主体724,还使相对的外支撑腿720和相对的内腿722向内移动,更靠近在一起。当它们向内移动时,内腿722与IOL 110的袢112接触。内腿722使袢112移动到光学器件114顶部上。在夹子706被压缩的同时,操作者可以从袢光学器件管理系统106移除夹子706。当夹子706被移除时,由夹子706(例如,通过脚部806)向板704施加的力被移除。没有此力,板704朝里卷到或至少部分地卷到自身上成第二位置(如图10最佳所示),因为不再有力和/或物体防止板704移动。当板704卷起时,设置在板704的晶状体表面718上的IOL 110如图12所示朝里卷到自身上。
在一些实施例中,袢管理系统被配置为没有板,并且夹子706将袢折叠在IOL的顶部上。同样,在一些情况下,IOL涉及包括环和从环延伸的袢的基部。在这些情况下,可以在第一手术步骤中将IOL基部插入眼睛中,并且可以在第二手术步骤中将单独的光学器件插入并与基部联接。此外,光学器件可以与基部断开联接,并且在随后的手术步骤中可以将另一光学器件插入并联接到已经安装的基部。在这些情况下,例如,由于不存在光学器件并且因此不需要被折叠,因而可以在没有板的情况下采用袢管理系统。
在图12的所示实施例中,板704正朝里卷到自身上,从而使IOL 110也朝里卷到自身上。如图所示,IOL 110的袢112被设置在光学器件114上。在将IOL 110卷成折叠位置(例如,图1所示的折叠构型116)之后,从插入工具100分配IOL 110。举例来说,驱动系统(例如,图1所示的驱动系统102)致动以使IOL 110穿过管嘴108从袢光学器件管理系统106行进出来,从而从管嘴108的远侧端头326处的开口328离开。相应地,本文描述的袢光学器件管理系统106用于准备插入眼睛(例如,图2A和图2B所示的眼睛200)中的IOL 110。
认为,根据前面的描述,本披露的操作和构造将是显而易见的。虽然以上示出或描述的设备和方法已被表征为优选的,但是在不脱离所附权利要求所限定的本披露的精神和范围的情况下,可以在其中进行多种不同的改变和修改。
- 利用鱿鱼夹子的袢光学器件管理系统
- 利用旋转凸轮的袢光学器件管理系统