三轴加速度传感器
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及MEMS领域,尤其涉及一种三轴加速度传感器。
背景技术
对于三轴加速度传感器,现有技术中通常采用以彼此独立的多个质量块来感测不同轴向的加速度,缺点在于体积庞大,且结构复杂,因而不利于制作。而采用单一质量块来检测三轴的加速度,容易导致跨轴检测,而且Z方向的检测精度较低,而且容易受到外界应力影响
发明内容
本发明所要解决的技术问题是,提供一种三轴加速度传感器,能够提高检测精度。
为了解决上述问题,本发明提供了一种三轴加速度传感器,包括基板、以及固定设置于基板上的至少一个锚点;与基板表面平行且彼此相互垂直的两方向定义为X方向与Y方向,所在的平面为XY平面,垂直XY平面的方向为Z方向;所述传感器还包括:第一可动质量块,通过第一弹性元件与锚点连接,所述第一弹性元件为X方向与Y方向的双向弹性元件与梁连接;第二可动质量块,通过第二弹性元件与第一可动质量块连接,所述第二弹性元件为以Y轴为转动轴的转臂,使所述第二可动质量块可绕XZ平面转动;以及第三可动质量块,通过第三弹性元件与第一可动质量块连接,所述第三弹性元件为以Y轴为转动轴的转臂,使所述第三可动质量块可绕XZ平面转动;第二可动质量块和第三可动质量块的重心分别位于锚点Y轴方向的两侧。
本发明通过设置两个不同重心位置的质量块,通过质量块的旋转消除外界应力对加速度检测的影响。
附图说明
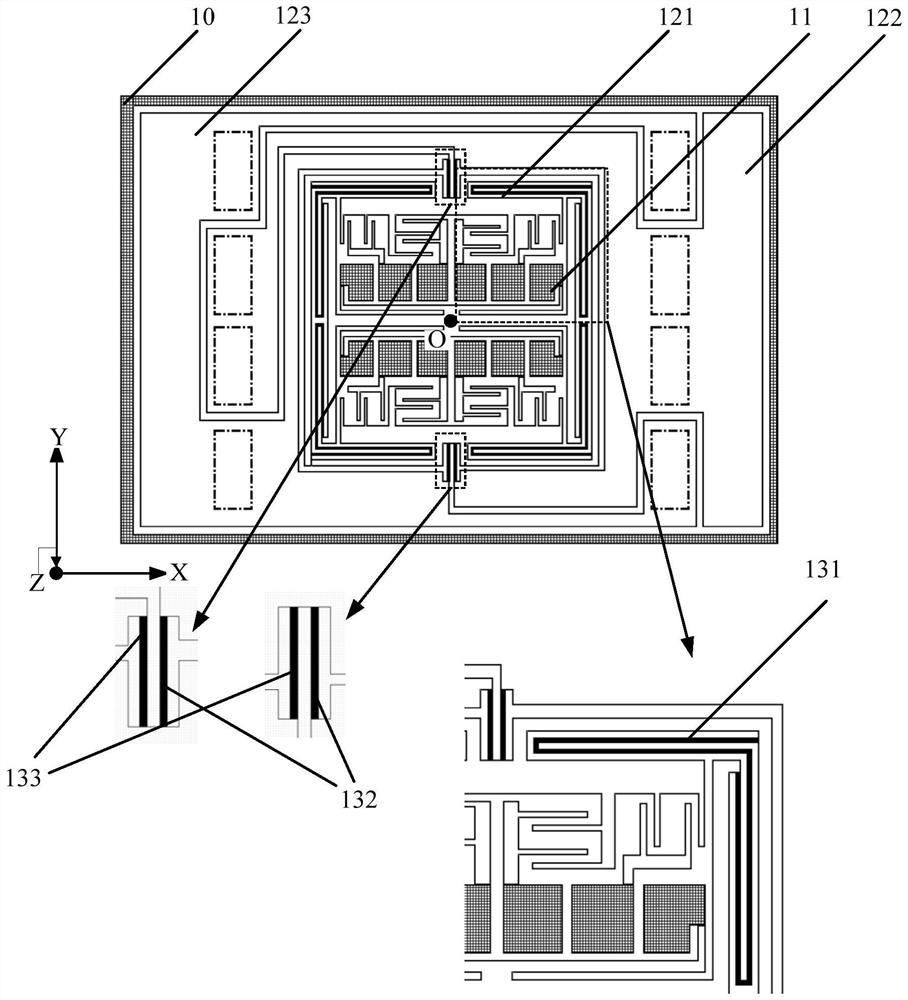
附图1和附图2所示是本发明一具体实施方式所述三轴加速度传感器的结构示意图。
附图3至附图5所示是本发明一具体实施方式所述三轴加速度传感器受外部加速度影响而产生形变的结构示意图。
附图6所示是本发明一具体实施方式所述三轴加速度传感器设置双对称质量块的技术进步原理图。
附图7所示是本发明一具体实施方式所述三轴加速度传感器设置多锚点的技术进步原理图。
具体实施方式
下面结合附图对本发明提供的三轴加速度传感器的具体实施方式做详细说明。
附图1所示是本具体实施方式所述三轴加速度传感器的结构示意图,包括:固定在基板上的外框10、以及固定设置于基板上的至少一个锚点11;与基板表面平行且彼此相互垂直的两相对方向定义为X方向与Y方向,所在的平面为XY平面,垂直XY平面的方向为Z方向。在本具体实施方式中,以4个锚点为例进行叙述,4个锚点之间以所述三轴加速度传感器的中心O点呈对称布置,并通过梁彼此连接。
第一可动质量块121,通过第一弹性元件131与锚点11连接,所述第一弹性元件为X方向与Y方向的双向弹性元件与梁连接;第二可动质量块122,通过第二弹性元件132与第一可动质量块121连接,所述第二弹性元件为以Y轴为转动轴的转臂,使所述第二可动质量块122可绕XZ平面转动;以及第三可动质量块123,通过第三弹性元件133与第一可动质量块121连接,所述第三弹性元件133为以Y轴为转动轴的转臂,使所述第三可动质量块123可绕XZ平面转动;第二可动质量块122和第三可动质量块123的重心分别位于锚点Y轴方向的两侧。
在一个具体实施方式中,为了检出上述结构根据外界加速度产生的形变,采用附图1所示的梳齿电极检测XY平面内的加速度。当有X方向将加速度时,上述结构的形变如图3所示,其工作原理如下:当有X方向将加速度时,第一弹性元件131将产生沿着X方向的变形,第一可动质量块121产生X方向的位移,从而导致X电极间隙产生变化,检查出X电极组的差分电容,从而检测出X的加速度。第二弹性元件132和第三弹性元件133由于X方向的刚度较大,第二可动质量块122和第三可动质量块123相对第一可动质量块121的相对位移较,第二可动质量块122和第三可动质量块123近为X方向检查提供惯性质量,而不产生跨轴噪声,因此可视为和第一可动质量块121一体向X方向位移,起到了加重惯性质量的作用。
在一个具体实施方式中,为了检出上述结构根据外界加速度产生的形变,采用附图1所示的梳齿电极检测XY平面内的加速度。当有Y方向有加速度时,上述结构的形变如图4所示,其工作原理如下:当有Y方向有加速度时,第一弹性元件131将产生沿着Y方向的变形,第一可动质量块121产生Y方向的位移,从而导致Y电极间隙产生变化,检查出Y电极组的差分电容,从而检测出Y的加速度。而第二弹性元件132和第三弹性元件133由于Y方向的刚度较大,第二可动质量块122和第三可动质量块123相对第一可动质量块121的相对位移较小,第二可动质量块122和第三可动质量块123为Y方向检查提供惯性质量,而不产生跨轴噪声,因此可视为和第一可动质量块121一体向Y方向位移,起到了加重惯性质量的作用。
为了更精确的检测Z方向的加速度,本具体实施方式采用附图2所示的电极设置形式来设置电极结构用以检测Z方向上的加速度。即至少两个由基板表面设置的金属层组成的第一Z电极,本具体实施方式为负电极ZN1和ZN2,以及正电极ZP3和ZP4,分别位于锚点两侧,对应位于第二可动质量块122表面的电极,组成至少一个差分电容对;以及至少两个由基板上金属层组成的第二Z电极,本具体实施方式为负电极ZN3和ZN4,以及正电极ZP1和ZP2,位于锚点两侧,对应位于第三可动质量块123表面的电极,组成至少一个差分电容对。
当有Z方向加速度时,上述结构的形变如图5所示。第二弹性元件132将产生变形,第二可动质量块122产生转动,其主要运动形式是第二可动质量块122绕Y轴转动,由于负电极ZN1和ZN2,以及正电极ZP3和ZP4的排布,将产生一差分电容,从而检查出Z方向的加速度。而第三弹性元件133也将产生变形,第三可动质量块123产生绕Y轴转动,其主要运动形式是第三可动质量块123绕Y轴转动,由于负电极ZN3和ZN4,以及正电极ZP1和ZP2的排布,将产生一差分电容,从而检查出Z方向的加速度。
设置两个质量块,且第三可动质量块123的重心位置与第二可动质量块122相反,可以抵消锚点倾斜带来的系统误差,上述设置的原理图如图6所示,左侧为单一质量块的情况,右侧为双质量块的情况,双质量块可以为对称或者非对称的结构。上部是受到Z方向加速度的情况,下部是锚点偏移的情况。可以看出,当受到Z方向的加速度时,对于单一质量块,发生倾斜的情况即反应了加速度的情况;而对于双质量块,可以通过将第一Z电极和第二Z电极在锚点两侧交叉布置,第二可动质量块122对应的金属电极在一侧为差分电容的正电极时,同一侧的第三可动质量块123对应的金属电极为差分电容的负电极,因此通过电容的反向设置,使偏移相反的两个质量块对电容值的贡献是一致的。而当锚点偏移时,对于左边的情况,锚点倾斜直接导致了电容值变化,引起加速度计的零点偏移,无法区分质量块倾斜是由应力导致锚点倾斜导致还是加速度导致;而对于右边的情况,由于第一Z电极和第二Z电极在锚点两侧交叉布置,第二可动质量块122对应的金属电极在一侧为差分电容的正电极时,同一侧的第三可动质量块123对应的金属电极为差分电容的负电极,因此两个相同倾斜方向的基板对电容的贡献是相反的,第二可动质量块122和第一Z电极之间产生差分电容,和第三可动质量块123和第二Z电极之间产生的差分电容是相同的方向最终总的差分电容相互抵消为0,从而消除外界应力对加速度检测的影响。进一步的,将上述两个质量块设置成对于锚点的力矩相同,可以更好的将差分电容准确归零。
设置多个锚点,例如上述具体实施方式中呈矩形四角分布的四个锚点,可以抵消锚点倾斜带来的系统误差,上述设置的原理图如图7所示。对于一个锚点的情况当锚点产生倾斜时,会导致质量块的倾斜,而当对应倾斜方向存在两个两个距离的锚点时,可以极大消减质量块的倾斜带来的影响。由于上述情况在X和Y方向都有可能出现,因此应当对应于X方向和Y方向都需要两个锚点,即上述具体实施方式中呈矩形四角分布的四个锚点。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 加速度传感器与三轴加速度传感器
- 低轴间耦合度的八梁三轴加速度传感器