应用于无人机无线充电平台的自动对准圆台型磁耦合机构
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及无线电能传输技术领域,特别涉及一种应用于无人机无线充电平台的自动 对准圆台型磁耦合机构。
背景技术
无线电能传输技术不需要使用金属电缆等介质就可以传输电能,它具有电气隔离、方 便、安全等优点,可以很好的解决有线电能传输带来的各类问题。目前,无线电能传输技 术已经被广泛的应用于电动汽车大功率无线充电,植入式医疗,水下探测器无线供电,机 器人关节电能信号同步传输等领域。
在传统的无线电能传输系统技术中,松耦合变压器耦合系数较低,线圈的形状、大小 和材料决定初级线圈和次级线圈之间的耦合系数及系统产生的漏磁通。由于这些特性,随 着线圈的偏移,耦合系数会大幅减小,进而导致系统的传输效率大幅降低。
由于目前蓄电池技术的限制,为了保证无人机的灵活性和小型化,不可能在飞行器上 携带过大容量蓄电池,而传统接触式的有线充电方式存在操作繁复、使用寿命短、在室外 可能带来安全隐患等问题。
发明内容
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
为此,本发明的目的在于提出一种应用于无人机无线充电平台的自动对准圆台型磁耦 合机构。
为达到上述目的,本发明实施例提出了应用于无人机无线充电平台的自动对准圆台型 磁耦合机构,包括:设置在无线充电平台上的发射端和设置在无人机起落架上的接收端, 其中,所述无线充电平台为圆台型,且圆台四周均为光滑斜面,所述发射端包括多个发射 端磁芯和绕设在发射端磁芯上的发射端线圈,所述多个发射端磁芯均匀设置在无线充电平 台的内壁,所述发射端线圈缠绕在无线充电平台的外侧,所述接收端仅包括绕设在无人机 起落架上的接收端线圈。
本发明实施例的应用于无人机无线充电平台的自动对准圆台型磁耦合机构,因其原副 边线圈都为圆台型,可使得无人机在降落时通过重力作用使原副边线圈自动对准,降低了无人机的停靠精度,使无人机充电更加容易且维持在较高效率;同时,只需要在 无人机中安装接收线圈(副边线圈)及后级整流电路,并不会大幅增加无人机重量, 仍能保证无人机的灵活性和小型化,并且接收端体积小、质量轻、可便捷转配到无人 机上。
另外,根据本发明上述实施例的应用于无人机无线充电平台的自动对准圆台型磁耦合 机构还可以具有以下附加的技术特征:
进一步地,在本发明的一个实施例中,所述发射端磁芯为矩形长条状的铁氧体磁芯。
进一步地,在本发明的一个实施例中,所述发射端线圈的高度为100mm-200mm,顺时 针或逆时针、自上至下或自下至上绕设在无线充电平台的外侧,且所述发射端线圈的上半 径为25mm-75mm,下半径为80mm-150mm,缠绕厚度为2mm-5mm。
进一步地,在本发明的一个实施例中,所述发射端线圈的高度大小与磁耦合机构的耦 合系数成反比关系。
进一步地,在本发明的一个实施例中,所述发射端线圈的上半径大小和下半径大小与 磁耦合机构的耦合系数成正比关系,但所述发射端线圈的下半径大小与磁耦合机构的耦合 密度成反比关系,且每个下半径的取值均会有一个上半径的取值使耦合密度最大。
进一步地,在本发明的一个实施例中,所述接收端线圈高度为10mm-100mm,顺时针或 逆时针、自上至下或自下至上绕设在无人机起落架上,且所述接收端线圈的上半径为25mm-80mm,下半径为80mm-200mm,下半径距底高度为0mm-120mm,缠绕厚度为2mm-5mm。
进一步地,在本发明的一个实施例中,当无人机降落在无线充电平台上时,所述发射 端线圈与所述接收端线圈之间的间距为5mm-15mm,若接收端线圈的中心轴线未与所述发射 端线圈的中心轴线重合时,无人机由于重力作用将所述接收端线圈的中心轴线滑至所述发 射端线圈的中心轴线上,实现自动对准。
本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明 显,或通过本发明的实践了解到。
附图说明
本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显 和容易理解,其中:
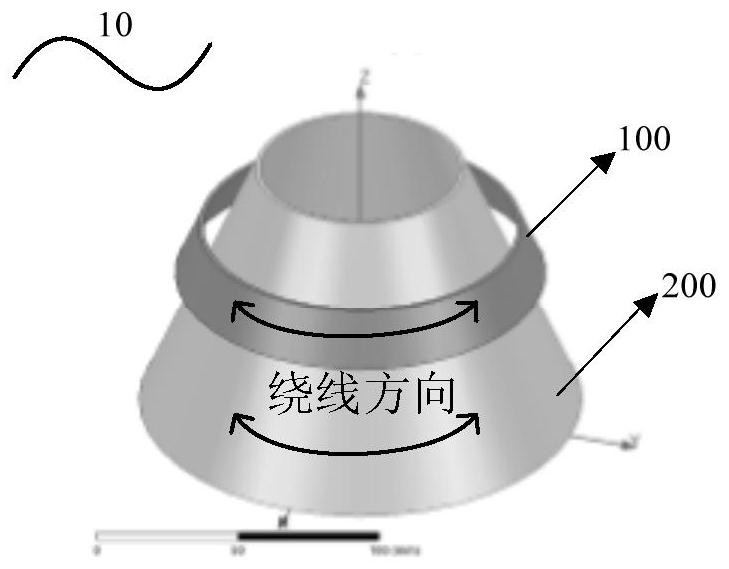
图1是本发明一个实施例的应用于无人机无线充电平台的自动对准圆台型磁耦合机构 的结构示意图;
图2是本发明一个实施例的无人机降落在圆台型磁耦合机构的结构示意图;
图3是本发明一个实施例的应用于无人机无线充电平台的自动对准圆台型磁耦合机构 的具体结构示意图,(a)为正视图,(b)为斜视图;
图4是本发明一个实施例的应用于无人机无线充电平台的自动对准圆台型磁耦合机构 横截面的磁通示意图,(a)为正对位置,(b)为向上偏移位置;
图5是本发明一个实施例的平面型磁耦合结构磁芯横截面的磁通示意图,(a)为正对位置,(b)为横向偏移位置;
图6是本发明一个实施例的圆台型磁耦合机构中各参数的示意图,(a)为侧视图,(b)为剖视图;
图7是本发明一个实施例的随着原边线圈高度变化耦合系数及表面积变化情况仿真结果示意图;
图8是本发明一个实施例的随着原边上下半径的变化耦合系数的变化情况仿真结果结果示意图;
图9是本发明一个实施例的随着原边上下半径的变化耦合密度的变化情况仿真结果示意图;
图10是本发明一个实施例的随着原边上半径的变化耦合密度的变化情况仿真结果 示意图;
图11是本发明一个实施例的随着副边线圈宽度的变化耦合密度的变化情况仿真结 果示意图;
图12是本发明一个实施例的随着副边线圈高度的变化耦合系数和耦合密度的变化 情况仿真结果示意图;
图13是本发明一个实施例的随着副边线圈高度的变化耦合密度的变化情况仿真结 果示意图;
图14是本发明一个实施例的随着原副边距离的变化仿真结果示意图,(a)为耦合系数,(b)为体积耦合密度;
图15是本发明一个实施例的随着原副边距离的变化体积耦合密度的变化仿真结果 示意图;
图16是本发明一个实施例的不同视图下的磁场强度分布情况示意图,(a)为上方斜视图,(b)为下方斜视图;
图17是本发明一个实施例的从底部(Z轴负方向)视角下的磁芯放置示意图;
图18是本发明一个实施例的不同磁芯条数下耦合系数变化情况示意图;
图19是本发明一个实施例的三种磁耦合结构偏移情况对比示意图;
图20是本发明一个实施例的无线电能传输系统示意图;
图21是本发明一个实施例的工作下的仿真电路图;
图22是本发明一个实施例的实际绕制的磁耦合结构示意图,其中,(a)为原边线圈斜视图,(b)为原副边线圈斜视图;
图23是本发明一个实施例的恒流模式下逆变后电压电流仿真图;
图24是本发明一个实施例的恒压及恒流模式下逆变后电压电流波形示意图。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同 或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描 述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
下面参照附图描述根据本发明实施例提出的应用于无人机无线充电平台的自动对准 圆台型磁耦合机构。
图1是本发明一个实施例的应用于无人机无线充电平台的自动对准圆台型磁耦合机 构的结构示意图。
如图1所示,该机构10包括:设置在无线充电平台上的发射端100和设置在无人机起落架上的接收端200。
其中,如图2和3所示,无线充电平台为圆台型,且圆台四周均为光滑斜面,发射端100包括多个发射端磁芯101和绕设在发射端磁芯上的发射端线圈(即原边线圈)102,发 射端磁芯101为矩形长条状的铁氧体磁芯,多个发射端101磁芯均匀设置在无线充电平台 300的内壁,发射端线圈102缠绕在无线充电平台的外侧,接收端200仅包括绕设在无人 机起落架上的接收端线圈(即副边线圈)201。当无人机不能准确降落在平台中心位置时, 即接收端线圈的中心轴线未与发射端线圈的中心轴线重合时,会由于重力的作用滑到中心 位置,从而实现自动对准,能保证发射接收线圈一直处在中心对齐的相对位置下。
可以理解的是,由于实际应用情况复杂多变,无人机起落架上的接收端线圈201可能 并不会卡在固定位置,会向上偏移一些距离,例如,如图4(a)所示,由于圆台形磁耦合结构原边线圈产生的磁力线几乎可以尽数穿过副边线圈,如图4(b)所示,当副边线圈 向上偏移时,磁力线并不会变化很大,大部分磁力线仍能穿过副边线圈,磁阻不会增大很 多,耦合系数下降不会很严重。如图5(a)所示,现有技术中的平面变压器(包含平面圆 形与平面方形变压器)的磁力线发散;如图5(b)所示,在原副边线圈偏移后除了磁阻的 增大,主磁通中同时存在两个相反方向的磁力线,在通过线圈时会发生相互抵消的情况, 这会极大加快耦合系数的降低。因此,从磁力线角度解释了本发明实施例提出的圆台形磁 耦合结构与现有的平面型磁耦合结构相比,抗偏移性能更好。
进一步地,发射端线圈的高度大小与磁耦合机构的耦合系数成反比关系。发射端线圈 的上半径大小和下半径大小与磁耦合机构的耦合系数成正比关系,但发射端线圈的下半径 大小与磁耦合机构的耦合密度成反比关系,且每个下半径的取值均会有一个上半径的取值 使耦合密度最大。
具体地,本发明为了使圆台形磁耦合结构能够更好的发挥效果,从保证该磁耦合机构获得较大的耦合系数、保证耦合系数的前提下尽可能的保证经济性、接受线圈的 轻量化三个优化原则出发,对圆台形磁耦合机构中线圈参数进行优化设计。
首先,在无线电传输系统中,磁耦合结构的参数指标有很多,如体积、重量和成 本等,但从电路角度看,立足于提升系统性能的磁耦合结构关键参数就是耦合系数k, 其定义为:
其中,M为松耦合变压器互感,L
如图6所示,发射端线圈102的高度H
表1 待优化的尺寸参数以及优化范围
先对发射端线圈的高度H
如图7所示,H
接下来,对RU
如图8所示,RU
如图9所示,同图8一样,RU
接下来对副边线圈的高度H
在进行优化前,为了更好地表述优化结果对系统的影响,在耦合密度DI的基础上,提 出副边耦合密度DI
如图11所示,可以看出,随着副边线圈宽度的增加,原副边线圈的耦合密度先是略微 上升然后又略微下降;副边线圈的耦合密度下降幅度较大。如果只考虑DI的话,会选择DI取得最大值时H
接下来对副边线圈的放置高度H
如图13所示,随着副边线圈高度H
接下来对RU
表2 利兹线规格表部分摘录
从表中可以看出,利兹线内部漆包线股数直接决定了利兹线的外径及耐电流值。而利 兹线外径直接决定了线圈厚度TH,因此TH的优化不能仅仅考虑仿真结果,还应考虑实际 情况。因此仿真时,先以1mm为步长,使TH从1mm增加到5mm,再根据搭建的系统的实际 情况,决定优化值。原副边线圈间距SP描述了无人机降落到平台之后,搭载在无人机上的 副边线圈与架在平台上原边线圈之间的紧密贴合程度。在仿真中以1mm为步长从5mm增加 到15mm。其他参数为之前已经优化完成的优化值:RU
其中
图14(a)描绘了随着原副边距离SP的变化,不同线圈厚度情况下耦合系数k的变化。 从图中可以看出,同一TH值下,随着SP的增加耦合系数逐步下降。同一SP值下,TH在2mm-5mm内是随着TH值的增加而增加。但是这无法确定SP的优化值,不过这为我们最终 的优化提供了思路:在允许的情况下,尽可能的减少原副边的距离会提高系统的耦合系数。
图14(b)描绘了随着原副边距离SP的变化,不同线圈厚度下体积耦合密度DIV的变化。可以明显看到,随着TH值的增加,体积耦合密度急剧下降,这说明增加线圈厚度会违 反经济性这一优化原则。但是从表2可以看出,利兹线有很多直径在1mm-2mm之间,因此 需要进一步仿真确定优化结果。
如图15所示,描绘了随着原副边距离SP值得变化,不同线圈厚度下体积耦合密度DIV 的变化情况。其中,TH以0.1mm为步长,从1mm增加到2mm;SP以1mm为步长,从5mm增 加到15mm。从图中可以看出,随着原副边距离的增加,体积耦合密度逐步下降;相原副边 距离下,随着线圈厚度的增加体积耦合密度逐渐下降。这说明要想获得更大的耦合系数及 更好的经济性,需要尽可能的拉近原副边的距离,即降低SP值;还需要尽可能的是线圈厚 度更小,即降低TH值。当进行电路仿真及系统搭建之后,即可根据实际情况优化SP值和 TH值。现根据经验,暂定SP=10mm,TH=1.7mm(即耐流值为5.9A)为优化结果。
最后是磁芯的优化。如图16所示,下方(Z轴副方向)的浅灰色线圈为原边线圈,上方(Z轴正方向)的深灰色线圈为副边线圈。从图中可以看出,磁力线从原边线圈内部由Z 轴负方向向Z轴正方向行动,到达顶端后从外部由由Z轴正方向向Z轴负方向行动,最终 形成一个闭合回路。还可以看到,有一部分磁力线未全部穿过副边线圈,而铁氧体磁芯具 有导磁的作用,若能引导此部分磁力线也穿过副边线圈,则能提高耦合系数,进而提高系 统性能。
图3(b)中是把原边线圈内部都放置磁芯,这样的磁芯不仅难以制作,且成本较大,不适合批量生产。常见的磁芯为条状,结合之前的优化结果,本发明实施例采用锰锌铁氧体PC40材质,4×8×90mm规格的磁芯。由磁力线分析及经验,可知将磁芯贴在原边线圈 内部效果较好。如图17所示,以9条磁芯为例,磁芯在原边线圈内紧贴线圈均匀放置。
如图18所示,可以看出,有无磁芯对耦合系数影响较大,放置3条-9条磁芯区间与放 置9条与10条磁芯区间相比,明显前者对耦合系数的增加作用更为明显,虽然放置20条磁芯可以使得耦合系数取得最大值,但是考虑经济性原则,最终选择9条磁芯作为最后的优化结果。
至此,优化过程结束。以上优化过程得到以下优化结果:RU
还可得到如下优化结论:(1)其他参数不变的情况下,H
进一步地,由于实际情况复杂多变,无人机降落到平台上时可能不会回刚好卡在规定 位置,而是会向上偏移一些距离,因此新型耦合机构的抗偏移性能也是一项非常重要的指 标,本发明实施例将使用上述优化值构建的新型圆台形磁耦合机构与传统磁耦合机构进行 对比。
具体地,现将优化后的分立式扁平磁耦合结构与平面圆形和平面方形磁耦合结构进行 对比,来验证新型圆台形磁耦合机构的优劣,其中后两种磁耦合结构已凭借其耦合系数高、 抗水平偏移性能强的优点,获得了广泛的应用,比较时各个磁耦合结构的尺寸参数如表3。 为公平起见,原副边距离、利兹线规格都保持一致,利兹线绕制而成的原副边线圈体积也 相同,采用的磁芯规格及条数也相同,同时通过改变线圈匝数以保证不同结构在正对时的 自感相同,且偏移时皆基本不变。
表3 新型圆台结构和传统磁耦合机构对比
其中,
由于新型圆台形磁耦合结构不存在横向偏移的情况,因此只比较各个磁耦合结构纵向 偏移(Z轴正方向)情况下的结果。如图19所示,实线代表k的变化情况,虚线代表CCRR的变化情况。可以看出,不论是比较k值还是CCRR值,新型圆台形磁耦合机构的性能都明 显强于传统的平面圆形和平面方形结构。也就说明了本发明提出的新型磁耦合结构具有较高的耦合系数和较好的抗偏移特性。
进一步地,如图20-21所示,下面通过搭建了包括全桥逆变器、无线电能传输线圈,整流器的无线电能传输系统的实验样机,以验证本发明实施例提出的新型磁耦合结构的可行性和正确性。其中,补偿采用S-SP补偿,副边采用不控整流。
图22为实际绕制的磁耦合结构,其中,磁耦合机构与补偿参数的各项参数值。
表4 系统中各项参数及其取值
如图22所示,为恒流模式下,经过逆变之后电压与电流仿真图。VP10与I10为恒流模 式下的电压及电流。
如图23所示,图6-5为进行实物实验时逆变桥输出的电压及电流。截取的是负载10Ω时的电压电流波形。从图中可以看出,电压与电流基本同相位,这说明整个系统的等效阻抗为纯阻性,此时达到了ZPA(zero phase angle)条件。
在整个实验过程中,整体样机已具备基本设计要求,原副边线圈耦合较紧密,系统能 够正常工作,因此本发明实施例提出的新型圆台磁耦合结构可投入实际应用当中。
综上,本发明实施例提出的应用于无人机无线充电平台的自动对准圆台型磁耦合机 构,因其原副边线圈都为圆台型,可使得无人机在降落时通过重力作用使原副边线圈自动对准,降低了无人机的停靠精度,使无人机充电更加容易且维持在较高效率;同 时,只需要在无人机中安装接收线圈(副边线圈)及后级整流电路,并不会大幅增加 无人机重量,仍能保证无人机的灵活性和小型化,并且接收端体积小、质量轻、可便 捷转配到无人机上;另外,由于采用了无线充电方式,相比于传统的有线触电式充电 平台,在室外环境中可降低安全隐患及意外风险。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示 或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两 个,三个等,除非另有明确具体的限定。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、 或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点 包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必 须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结 合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的, 不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例 进行变化、修改、替换和变型。
- 应用于无人机无线充电平台的自动对准圆台型磁耦合机构
- 一种用于无人机无线充电的轻量化正交型螺线管磁耦合机构