一种平地机工作装置防撞控制系统
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及一种平地机工作装置防撞控制系统,属于平地机领域。
背景技术
平地机的铲刀能够进行左右升降、回转、摆动等多维度动作,铲刀在回转过程中如果控制不好,尤其对于新驾驶员,很容易触碰到轮胎或爬梯导致轮胎或爬梯损坏,有很大的驾驶风险;同时在进行铲刀升降或摆动操作时,如若控制不当,会造成工作装置与摆架的冲击过大,严重时会造成摆架等机械结构的损伤,修复困难,修复成本高,给用户带来诸多不便。
发明内容
针对上述现有技术存在的问题,本发明提供一种平地机工作装置防撞控制系统,有效避免工作装置对轮胎和爬梯及摆架造成损坏,提高操控安全,降低用户损失和使用成本。
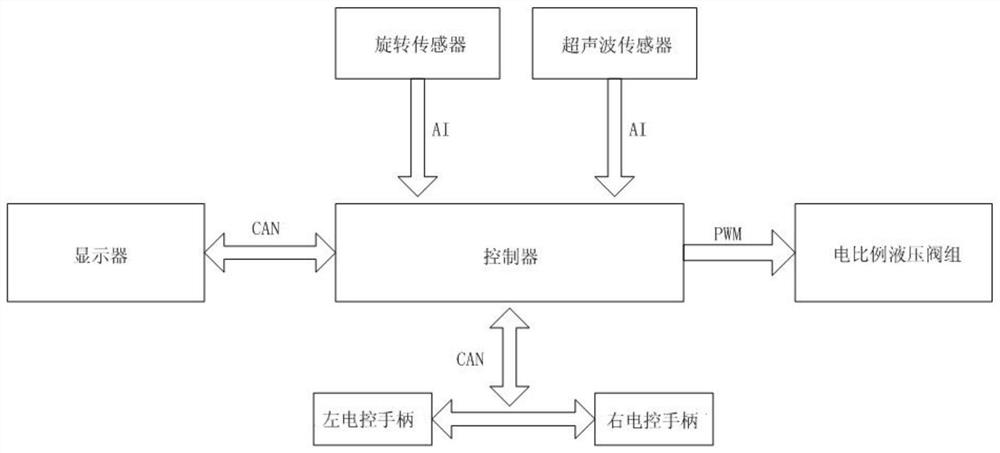
为了实现上述目的,本发明采用的一种平地机工作装置防撞控制系统,包括控制器,及分别与控制器连接的显示器、电比例液压阀组、旋转传感器、超声波传感器和电控双手柄;
所述显示器用于进行数据显示和标定;所述旋转传感器安装在回转接头处,用于测量铲刀的旋转角度;所述超声波传感器安装在牵引架上,用于测量工作装置到摆架的距离;所述电比例液压阀组用于执行控制器命令并进行平地机铲刀动作控制;所述电控双手柄用于发送液压动作指令;
所述控制器采集处理旋转传感器、超声波传感器的信号,并根据显示器标定的信息,控制电比例液压阀组的启停实现防撞控制。
作为改进,所述显示器用于进行防撞旋转角度的标定和摆架防撞距离的标定。
作为改进,标定的防撞旋转角度为角度区间,包括铲刀顺转和逆转时碰到轮胎或爬梯的两个角度区间。
作为改进,所述旋转传感器的角度测量区间不小于180°。
作为改进,所述旋转传感器、超声波传感器的传感器为模拟量信号,采用0-5V或4-20mA。
作为改进,所述超声波传感器的测量范围不大于5cm。
作为改进,所述显示器、电控双手柄均采用CAN线与控制器连接。
作为改进,所述电比例液压阀组为带负载敏感的阀组。
作为改进,所述工作装置包括铲刀、牵引架及附属的液压件和结构件。
与现有技术相比,本发明的平地机工作装置防撞控制系统,通过在铲刀的回转接头处增加旋转传感器和在牵引架上增加超声波传感器进行铲刀旋转角度和工作装置升降距离的测量,实现工作装置防撞的主动控制,有效的避免了工作装置对轮胎和爬梯及摆架的损坏,提高了操控安全性,降低了用户损失和使用成本。
附图说明
图1为本发明的结构示意图;
图2为本发明的原理示意图;
图3为本发明的控制流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
除非另有定义,本文所使用的所有的技术术语和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
如图1、图2所示,一种平地机工作装置防撞控制系统,包括控制器,所述控制器上连接有:用于进行数据显示和标定的显示器、用于执行控制器命令并进行平地机铲刀动作控制的电比例液压阀组、用于测量铲刀旋转角度的旋转传感器、用于测量工作装置到摆架距离的超声波传感器、用于发送铲刀回转和升降及摆动等指令的电控双手柄;
所述控制器采集处理旋转传感器、超声波传感器的信号,并根据显示器标定的信息,控制电比例液压阀组的启停实现防撞控制。
作为实施例的改进,所述显示器用于进行防撞旋转角度的标定和摆架防撞距离的标定,优选的,标定的防撞旋转角度为角度区间,包括铲刀顺转和逆转时碰到轮胎或爬梯的两个角度区间,能够同时防止铲刀碰到轮胎和爬梯。另外,采用的显示器型号可以为JCP200-050A。
作为实施例的改进,所述旋转传感器(型号可以为SRH761-180-V3-A3-3)的角度测量区间不小于180°;所述超声波传感器(型号可以为UR18.DA0.2-UAMJ.9SF)的测量范围不大于5cm,采用的超声波传感器数量为两个,左右各一个,分别用于测量摆架左右防撞距离。优选的,所述旋转传感器、超声波传感器的传感器为模拟量信号,采用0-5V或4-20mA。该类信号相对稳定、精度高。当然,旋转传感器和超声波传感器不局限于采用模拟量信号。
作为实施例的改进,所述电比例液压阀组为若干带负载敏感的阀组,用于控制铲刀的左右升降、铲刀回转、铲刀摆动等液压动作。
作为实施例的改进,所述电控双手柄包括左电控手柄、右电控手柄,通过电连接至控制器,通过CAN总线数据下发铲刀动作指令。相应的,显示器也通过CAN总线与控制器连接进行信号传输,信号传输更稳定。
具体控制过程如下:
首先,结合图3所示,通过所述显示器进行铲刀回转(顺转和逆转)防撞旋转角度区间标定和摆架左右防撞距离的标定,控制器实时监测旋转传感器和超声波传感器的信号,通过电控双手柄(左电控手柄和右电控手柄)操控铲刀回转动作,如果旋转传感器的测量数值超过防撞旋转角度区间标定范围,控制器停止电比例液压阀组中铲刀回转阀组的输出,防止铲刀回转角度继续加大,但允许电控双手柄(左电控手柄和右电控手柄)进行铲刀回转角度减小的操作;
然后,通过电控双手柄操控铲刀左升降动作,如果油缸左提升到达摆架左防撞距离标定值时,控制器停止电比例液压阀组中铲刀左提升和斜拉引出阀组的输出,防止铲刀左升和斜拉油缸引出动作;
最后,通过电控双手柄操控铲刀右升降动作,如果油缸右提升到达摆架右防撞距离标定值时,控制器停止电比例液压阀组中铲刀右提升和摆架斜拉阀组的输出,防止铲刀右升和斜拉油缸回缩动作。
本发明的平地机工作装置防撞控制系统,方便实用,效果明显,通过对铲刀旋转角度和工作装置升降距离的测量,进行工作装置防撞的主动控制,能够有效避免工作装置对轮胎和爬梯及摆架的损坏,提高了操控安全性,降低了用户损失和使用成本。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
- 一种平地机工作装置防撞控制系统
- 一种平地机铲刀工作装置及平地机