一种用于随动控制的穿戴式机器人控制器
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及一种用于随动控制的穿戴式机器人控制器,属于机器人技术领域。
背景技术
现有随动机器人控制技术主要有以下几种:一种采用光学识别安装于人体上的定位追踪点,然后通过算法驱动机器人,需要多个空间摄像头,成本较高,且场地受限;一种是采用陀螺仪等姿态传感器作为空间定位,通过算法进行人体关节定位,然后通过算法驱动机器人,其定位精度和稳定性较差,受磁场影响较大;还有一种是基于角度传感器的固定架,每个关节串联控制,体积较大且控制不灵活。
因此,要实现机器人的精准随动控制,还需要研究更好的方法。
发明内容
为了克服上述现有技术的不足,本发明提供了一种用于随动控制的穿戴式机器人控制器,穿戴式控制器设计轻巧,穿戴方便,对机器人的控制灵活精准、抗干扰性强。
为了实现上述技术目的,本发明采用的技术方案是:一种用于随动控制的穿戴式机器人控制器,采用等比例线性并联控制,以被控制机器人关键连接点及空间定位关系,对应构造类似机器人活动骨架的穿戴式控制器,在穿戴式控制器上,对应被驱动机器人运动油缸的位置设置等比例直线位移传感器,穿戴在人体上的控制器接收人体动作所带动传感器的反馈信号,通过伺服油泵控制机器人对应位置的运动油缸运动,从而实现被驱动机器人与控制人的随动。
进一步的,所述穿戴式机器人控制器包括穿戴件、控制骨架,控制骨架安装在穿戴件上。
更进一步的,所述穿戴式机器人控制器包括上身控制器,所述上身控制器的穿戴件为马甲,上身控制骨架安装在马甲上。
更进一步的,所述上身控制器包括骨架和控制传感器,其中骨架由胸部骨架基板,和安装在胸部骨架基板两侧的左、右臂骨架构成,所述臂骨架由骨架肩轴、骨架肩连接件、骨架大臂、骨架小臂组成,骨架肩轴一端连接胸部骨架基板,另一端连接骨架肩连接件,大臂自旋电位器的固定端安装在骨架肩连接件上,输出端连接骨架大臂的一端,骨架大臂的另一端和骨架小臂的一端铰接,小臂位移传感器一端连接骨架大臂,另一端连接骨架小臂,背阔肌处位移传感器一端通过传感器连接球头安装在骨架肩连接件上,另一端安装在胸部骨架基板上,胸大肌处位移传感器的一端安装在骨架肩连接件上,另一端安装在胸部骨架基板中部向外的延伸支架上,在骨架小臂上设置护腕套,控制人穿上马甲并将护腕套与手腕连接。
本发明的有益效果是:以机器人关键连接点及空间定位关系,设计能活动的类似机器人的活动骨架,将驱动机器人运动的油缸替换为等比例直线位移传感器,并在骨架上设计的旋转电位器提供信号驱动机器人大臂沿大臂轴心做旋转运动,人穿上即可带动所有与运动有关的传感器同时动作,控制灵活精准,抗干扰强;设计结构轻巧,穿戴方便,且便于携带。
附图说明
下面结合附图对本发明进一步说明。
图1为本发明实施例2的轴侧图;
图2为本发明实施例2的侧视图;
图3为本发明实施例2去掉马甲的后轴侧图;
图4为本发明实施例2被控制机器人结构图;
图5为本发明实施例2控制人的穿戴示意图。
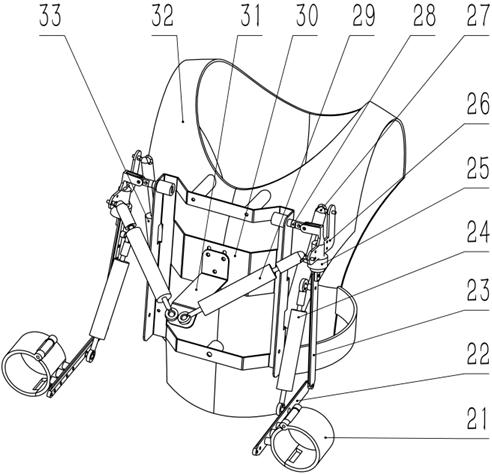
图中:1、伺服电机,2、电机固定板,3、联轴器,4、丝杠轴承座,5、下层安装板,6、导柱,7、丝杆螺母,8、牵引板,9、滚珠丝杠,10、直线轴承,11、球头座,12、上层安装板,13、小臂架,14、机身架,15、大臂架,16、球头,17、电机,18、肩头架,19、油管,20、肩轴,201-1、输入活塞杆,201-2、输入油缸,211-1、肩关节输出活塞杆,211-2、肩关节输出油缸,212-1、小臂输出活塞杆,212-2、小臂输出油缸,21、护腕套,22、骨架小臂,23、骨架大臂,24、小臂位移传感器,25、大臂自旋电位器,26、骨架肩连接件,27、传感器连接球头,28、骨架肩轴,29、胸大肌处位移传感器,30、胸部骨架基板,31、延伸支架,32、马甲,33、背阔肌处位移传感器。
具体实施方式
实施例1
对于随动机器人的控制,发明人设计了一种穿戴式机器人控制器,穿戴式机器人控制器包括穿戴件、控制骨架,控制骨架安装在穿戴件上。
穿戴件是控制人用于穿戴在身上的部件,一般采用织物或皮等材料,制成人体适应穿戴的结构。控制骨架采用轻质材料,比如合金、塑料件作为骨架。采用等比例线性并联控制,以机器人模型关键连接点及空间定位关系,对应构造类似机器人活动骨架的穿戴式控制器,在穿戴式控制器上,对应被驱动机器人运动油缸的位置设置等比例直线位移传感器,穿戴在人体上的控制器接收人体动作所带动传感器的反馈信号,通过伺服油泵控制机器人对应位置的运动油缸运动,从而实现被驱动机器人与控制人的随动。
对于不同的随动机器人,控制骨架是不同的,我们可以根据随动机器人的结构,设计局部控制或整体控制。
实施例2
作为实施例1的具体设计,以控制上半身为例。本实施例中的穿戴式机器人控制器设计为局部控制,本例中为上身控制器。
如图1、2、3所示,上身控制器的穿戴件为马甲32,上身控制骨架安装在马甲32上。
上身控制器包括骨架和控制传感器,其中骨架由胸部骨架基板30,和安装在胸部骨架基板两侧的左、右臂骨架构成,所述臂骨架由骨架肩轴28、骨架肩连接件26、骨架大臂23、骨架小臂22组成,骨架肩轴28一端连接胸部骨架基板30,另一端连接骨架肩连接件26,大臂自旋电位器25的固定端安装在骨架肩连接件26上,输出端连接骨架大臂23的一端,骨架大臂23的另一端和骨架小臂22的一端铰接,小臂位移传感器24一端连接骨架大臂23,另一端连接骨架小臂22,背阔肌处位移传感器33一端通过传感器连接球头27安装在骨架肩连接件26上,另一端安装在胸部骨架基板30上,胸大肌处位移传感器29的一端安装在骨架肩连接件26上,另一端安装在胸部骨架基板30中部向外的延伸支架31上,在骨架小臂22上设置护腕套21,控制人穿上马甲并将护腕套21与手腕连接。
如图4所示,该随动机器人的上半身控制结构,发明人在前已经申请过该结构的专利,该机器人的机身结构,由机身架14、下层安装板5、上层安装板12构成的胸架,左右手臂安装在机身架14的肩轴20上,左右手臂相同,均由肩头架18、大臂架15、小臂架13构成,在肩头架18中安装大臂电机17;在伺服电机固定板2的下方安装若干伺服电机1,伺服电机1的输出轴穿出伺服电机固定板2,通过联轴器3、丝杠轴承座4连接滚珠丝杠9,丝杆螺母7安装在滚珠丝杠9上,牵引板8连接丝杆螺母7,在下层安装板5和上层安装板12之间,每根滚珠丝杠9旁安装一根导柱6,牵引板8通过直线轴承10套接在导柱6上,输入活塞杆201-1连接牵引板8,输入油缸201-2安装在上层安装板12上,通过油管19与肩关节输出油缸211-2、小臂输出油缸212-2形成驱动机构,如肩关节输出油缸211-2的两端分别通过球头座11和球头16与机架和肩关节输出活塞杆211-1连接,小臂输出活塞杆212-1连接小臂。
如图5所示,将上身控制器的马甲穿在控制人身上,即可在人的手臂驱动下带动对应的传感器同时动作,由位于骨架上胸大肌位置和背阔肌位置的两个线性位移传感器协同提供信号通过伺服油泵控制机器人位于胸大肌位置和背阔肌位置的两个油缸并联运动,从而实现机器人肩关节仿人自由灵活的运动,由位于骨架上肱二头肌位置的线性位移传感器提供信号通过伺服油泵控制机器人位于肱二头肌位置的油缸进行随动控制,由位于骨架上大臂根部的旋转电位器提供信号通过伺服电机驱动机器人大臂沿大臂轴心做旋转运动。
驱动机器人运动的油缸(如肩关节输出油缸211-2)替换为等比例直线位移传感器,将所有传感器安装在活动骨架上,骨架安装在上,人穿上马甲并将骨架活动手臂末端与手腕绑在一起,而我们还可以设计腿部或脚部的穿戴控制器,其原理都是相同的。
本发明体积轻巧,穿戴方便,控制灵活精准,便于携带,抗干扰强。
以上实施例是用于对本发明的技术方案进行解释和说明,并不能作为对本发明的具体限定,凡是采用了本发明的技术方案,均应该在本发明的保护范围内。
- 一种用于随动控制的穿戴式机器人控制器
- 一种穿戴式机器人控制器