一种液压振动锤起动控制系统及其实现方法
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及液压振动锤技术领域,特别是涉及一种液压振动锤起动控制系统及其实现方法。
背景技术
随着现代建筑工业的高速发展,对打桩锤等桩工机械设备的技术要求也越来越高。液压振动锤是桩基础施工中的重要设备之一,其具有打桩效率高、费用低、桩头不易损坏、桩的变形小等优点。
液压振动锤主要是由振动锤体、液压动力站、减振架、振动箱体以及夹桩器组成。液压动力站是振动锤体的能量来源,为其提供液压动力,同时在液压动力站的控制柜内含有由信号控制器、电液比例阀、油泵与传感器组成的液压控制系统。液压振动锤减振架内部由多根减震弹簧组成,它的主要作用是使得振动箱体产生的振动较少地传递到横梁上,获得较好的减振效果。振动箱体是产生激振力的核心部件,箱体内成对的偏心轮高速旋转的偏心力矩,在竖直方向相互叠加,水平方向相互抵消,最终形成周期性的激振力。夹桩器可分为单头和双头夹桩器,用于将振动锤与桩固定以及传递激振力。
由上述内容可知,液压振动锤是依靠振动原理工作的,但是在起动阶段,通常会出现一段时间的强烈振动现象,该强烈振动现象是由油管内部液压冲击引起的。液压冲击的能量非常大,对振动锤体的工作寿命和安全性能造成极大的负面影响,并且该负面影响会随着振动锤功率的增大而加剧。
现有技术解决液压振动锤起动阶段存在液压冲击的问题的主流方案是,采用蓄能机构吸收液压冲击产生的能量,但这种方案需要在液压振动锤上增设溢流阀、蓄能器与电磁换向阀等液压部件,改变了液压系统机械结构,使液压系统复杂化,同时也增加压液系统出现故障的可能性。
发明内容
为解决上述技术问题,本发明的目的在于:提供一种液压振动锤起动控制系统及其实现方法。
本发明所采取的第一种技术方案是:
一种液压振动锤起动控制系统,应用于液压振动锤,所述液压振动锤包括电液比例阀、油泵、振动锤体和油管,所述液压振动锤起动控制系统包括:
上位机,用于输出电压控制信号,所述电压控制信号包括斜坡式电压控制信号或曲线式电压控制信号;
信号转换器,用于将所述电压控制信号转换为电流信号,所述电流信号用于控制所述电液比例阀的阀门开度;
所述上位机与所述信号转换器连接,所述信号转换器与所述电液比例阀连接,所述电液比例阀与所述油泵连接,所述油泵通过所述油管与所述振动锤体连接。
进一步,所述液压振动锤起动控制系统还包括:
采集模块,用于采集所述油泵的流量数据和所述油管的压力数据,并将所述流量数据和所述压力数据传输至所述上位机。
进一步,所述采集模块包括:
位置传感器,安装于所述油泵的电磁铁上,用于采集所述流量数据;
压力传感器,用于采集所述压力数据;
所述压力传感器包括第一检测通道和第二检测通道,所述第一检测通道安装于所述油管的进油口,所述第二检测通道安装于所述油管的出油口;
数据采集卡,用于将所述流量数据和所述压力数据传输至所述上位机。
进一步,所述上位机还用于根据所述流量数据和所述压力数据计算反馈数据,并根据所述反馈数据调整电压控制信号的控制参数。
进一步,所述斜坡式电压控制信号的公式如下:
其中,U
所述曲线式电压控制信号的公式如下:
其中,U
进一步,所述液压振动锤起动控制还包括:
电源模块,用于为所述信号转换器供电。
本发明所采取的第二种技术方案是:
一种控制方法,应用于上述的一种液压振动锤起动控制系统,包括以下步骤:
上位机输出电压控制信号,所述电压控制信号包括斜坡式电压控制信号或曲线式电压控制信号;
信号转换器将所述上位机输出的电压控制信号转换为电流信号,所述电流信号用于控制所述电液比例阀的阀门开度。
进一步,采集模块采集所述油泵的流量数据和所述油管的压力数据,并将所述流量数据和所述压力数据传输至所述上位机。
进一步,所述上位机根据所述流量数据和所述压力数据计算反馈数据,并根据所述反馈数据调整所述电压控制信号的控制参数。
本发明的系统的有益效果是:利用电压控制信号控制电液比例阀的阀门开度,再通过控制电液比例阀的阀门开度来控制油泵的流量,使得油泵的流量缓慢增加,使得液压振动锤通过油泵传递的液压动力实现平稳起动,从而消除或降低液压冲击,无须改变原有的液压振动锤液压控制系统机械结构,即可达到消除或削弱液压振动锤在起动过程中的强烈振动的目的。
附图说明
图1为本发明的一种液压振动锤起动控制系统的系统框图;
图2为本发明的一种液压振动锤起动控制系统的步骤流程图;
图3为本发明一种控制方法的步骤流程图。
具体实施方式
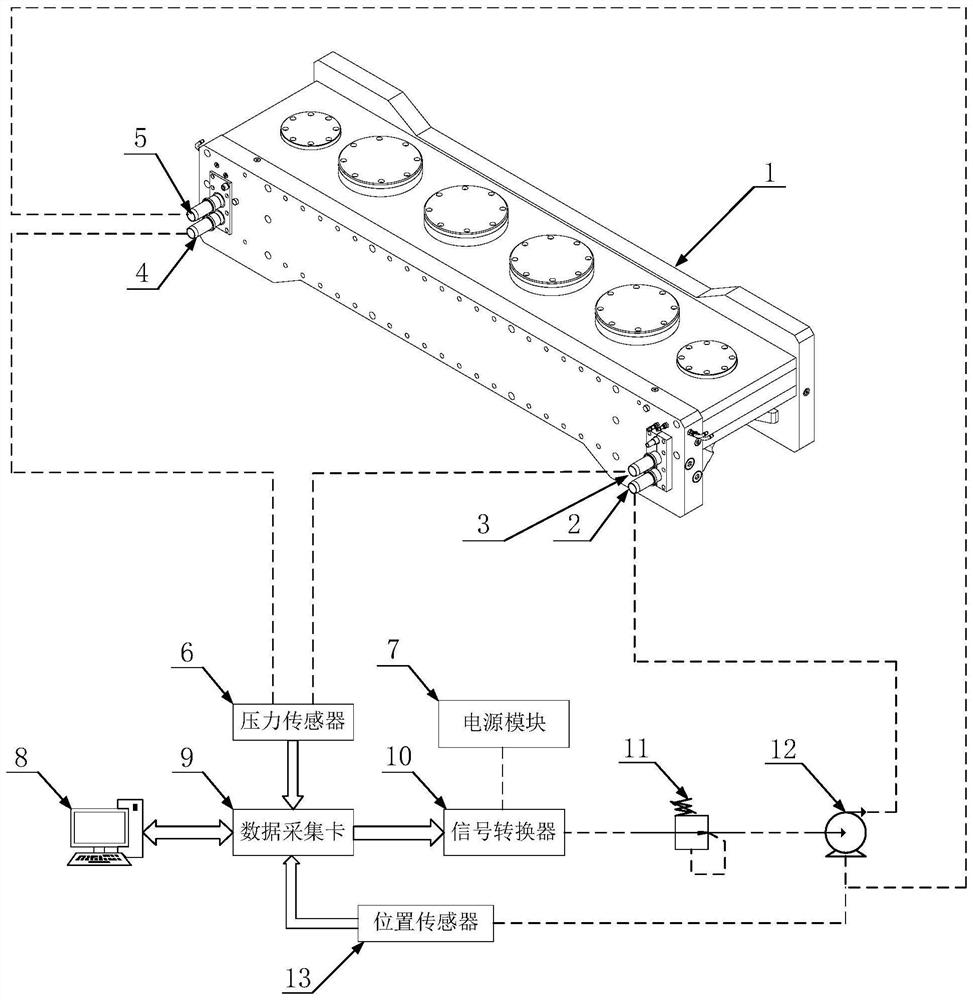
参照图1和图2,一种液压振动锤起动控制系统,应用于液压振动锤,液压振动锤包括电液比例阀11、油泵12、振动锤体1和油管,液压振动锤起动控制系统包括:
上位机8,用于输出电压控制信号,电压控制信号包括斜坡式电压控制信号或曲线式电压控制信号;
信号转换器10,用于将电压控制信号转换为电流信号,电流信号用于控制电液比例阀11的阀门开度;
上位机8与信号转换器10连接,信号转换器10与电液比例阀11连接,电液比例阀11与油泵12连接,油泵12通过油管与振动锤体1连接。
具体地,上位机8可采用计算机等实现。信号转换器10可采用型号为VT11004-1X的功率放大器,该功率放大器适用于控制比例减压阀,拥有2个时钟输出和2个信号开关输出,并且可通过过流检测模块保护信号电路。
在液压振动锤起动阶段,上位机8输出电压控制信号,该电压控制信号包括斜坡式电压控制信号或曲线式电压控制信号,这两种电压控制信号的幅值能够随着时间平缓增长,其中,斜坡式电压控制信号是指该电压控制信号的幅值随时间呈线性增长的电压控制信号,而曲线式电压控制信号,是指该电压控制信号的幅值随时间以曲线形式增长的电压控制信号。
参照图2,信号转换器10将该电压控制信号转换为电流信号后,利用该电流信号去控制电液压比例阀的阀门开度,其中,电流信号越大,电液比例阀11的阀门开度也越大,而阀门开度的大小控制着油泵12流量的大小,阀门开度越大,油泵12的流量越大。
因此,在液压振动锤起动阶段,可以通过控制电液比例阀11的阀门开度来控制油泵12的流量,使得油泵12的流量缓慢增加,使得液压振动锤通过油泵12传递的液压动力实现平稳起动,从而消除或降低液压冲击,无须改变原有的液压振动锤液压控制系统机械结构,即可达到消除或削弱液压振动锤在起动过程中的强烈振动的目的。
进一步作为可选的实施方式,液压振动锤起动控制系统还包括:
采集模块,用于采集油泵12的流量数据和油管的压力数据,并将流量数据和压力数据传输至上位机8。
具体地,本申请设置的采集模块用于采集油泵12的流量数据和油管的压力数据,从而利用流量数据和压力数据来实时调整电压控制信号,使得电压控制信号更好地服务于液压振动锤的起动过程中。在一个具体的实施例中,参照图1,采集模块包括:
位置传感器13,安装于油泵12的电磁铁上,用于采集流量数据;
压力传感器6,用于采集压力数据;
压力传感器6包括第一检测通道和第二检测通道,第一检测通道安装于油管的进油口(进油口包括第一进油口2和第二进油口3,可将第一检测通道安装于其中一个进油口),第二检测通道安装于油管的出油口(出油口包括第一出油口4和第二出油口5,可将第二检测通道安装于其中一个出油口)。
数据采集卡9,用于将流量数据和压力数据传输至上位机8。
具体地,压力传感器6可采用Multisystem 4010压力传感器,该压力传感器有四条并行采集通道,可将其中两条采集通道作为第一检测通道和第二检测通道,从而采集油管的进油口和出油口的压力数据。位置传感器13可采用GT2-P12K位置传感器,其检测压力的基本原理是,使用CMOS传感器进行高速拍摄读取电磁铁的移动量。数据采集卡9可采用型号为USB-6003数据采集卡,该数据采集卡拥有8个模拟输入通道,2个模拟输出通道,模数转换器(ADC)的分辨率为16位,最大采样率为100kS/s,数模转换器(DAC)的分辨率为16位。
位置传感器13采集到的流量数据和压力传感器6采集到的压力数据经过数据采集卡9传输至上位机8后,上位机8对该流量数据和压力数据进行处理得到反馈数据,根据反馈数据调整电压控制信号的控制参数,从而使得生成的电压控制信号更加贴合液压振动锤的实际运行状况,更好地控制液压振动锤的起动。
另外,当监测的流量数据超过预设阈值时,预警信号灯就会亮起,上位机8暂停输出电压控制信号,流量恢复正常后,继续输出电压控制信号。
进一步作为可选的实施方式,斜坡式电压控制信号的公式如下:
其中,U
由上述公式可以看出,该斜坡式电压控制信号的公式为线性函数,在预设的起动时间T
进一步作为可选的实施方式,曲线式电压控制信号的公式如下:
其中,U
由上述公式可以看出,该曲线式电压控制信号为曲线函数,在预设的起动时间T
进一步作为可选的实施方式,液压振动锤起动控制还包括:
电源模块7,用于为信号转换器10供电。
本发明还设置了电源模块7,该电源模块7为24V单组开关电源,其输出电压为24V,输出电流为1A,额定功率为25W。
参照图3,本发明一种应用图1的一种液压振动锤起动控制系统的控制方法,包括以下步骤:
S1、上位机8输出电压控制信号,电压控制信号包括斜坡式电压控制信号或曲线式电压控制信号;
S2、信号转换器10将上位机8输出的电压控制信号转换为电流信号,电流信号用于控制电液比例阀11的阀门开度。
进一步作为可选的实施方式,控制方法还包括以下步骤:
S3、采集模块采集油泵12的流量数据和油管的压力数据,并将流量数据和压力数据传输至上位机8。
进一步作为可选的实施方式,控制方法还包括以下步骤:
S4、上位机8根据流量数据和压力数据计算反馈数据,并根据反馈数据调整电压控制信号的控制参数。
综上所述,本发明一种液压振动锤起动控制系统及其实现方法,具有以下优点:
(1)本发明在不改变原有的液压振动锤液压控制系统机械结构基础上(不额外使用其他液压设备),通过信号处理方法优化起动控制,从源头上减弱液压冲击产生的能量,从而减弱液压振动锤在起动过程中的强烈振动;
(2)液压传动速度快且负载适应能力强,可选择多种起动控制模式,包括斜坡式电压控制信号来控制起动和曲线式电压控制信号控制起动两种起动方式;
(3)本发明的液压振动锤起动控制系统采用动态的信号反馈,根据传感器采集到的流量数据和压力数据,可在上位机中实时调整系统相关控制参数,解决了人为设定起动曲线与负载转矩曲线不匹配的难题;
(4)本发明的液压振动锤起动控制系统添加了流量预警功能,对液压振动锤起动系统运行状态进行实时采集与监控,并能及时反馈、处理故障。
以上是对本发明的较佳实施进行了具体说明,但本发明并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本申请权利要求所限定的范围内。
- 一种液压振动锤起动控制系统及其实现方法
- 一种电动液压挖掘机起动控制系统及控制方法