一种机床自动清理检测机器人及其自动清理检测方法
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及一种机床清理装置,尤其是涉及一种机床自动清理检测机器人及其自动清理检测方法。
背景技术
数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,用代码化的数字表示,通过信息载体输入数控装置。
现有的用于数控机床清理设备不能灵活调节对数控机床不同位置配件的清洗强度,只能使用统一压强的水压进行冲刷,从而可能造成部分相对脆弱的零部件出现损坏,不仅造成后续数控机床出现故障而需要维修,而且容易增加数控机床在作业时的安全隐患,且在对数控机床在进行清理时装置不能同时对机床残留的碎屑进行统一清理,当清洗液进行冲刷时碎屑容易与油污产生混合,增加装置对机床的清理难度,需要后期二次耗费人力时间进行处理。
现有机床清理只能通过人工或半自动实现对机床清理,并且现有的清理仅仅只能对碎屑和油污进行清理,不能通过对或冲压部件的温度以及收集的碎屑相关数据进判断工件加工的质量是否合格。
发明内容
本发明设计了一种机床自动清理检测机器人及其自动清理检测方法,其解决的技术问题是现有机床清理只能通过人工或半自动实现对机床清理,并且现有的清理仅仅只能对碎屑和油污进行清理,不能通过对冲压部件的温度或收集的碎屑相关数据进判断工件加工的质量是否合格。
为了解决上述存在的技术问题,本发明采用了以下方案:
一种机床自动清理检测机器人,包括移动机体(1),其能够围绕机床移动至不同的清理位置;温度感应装置,其能够对机床上的冲压部位的温度数值进行采集;和/或,碎屑吸附装置,其能够对机床上的金属碎屑进行收集并且进行重量检测;清洗装置,其能够对机床表面污物进行液体清理;控制装置,其不仅仅能够控制移动机体(1)、温度感应装置、碎屑吸附装置以及清洗装置的开启或停止,而且还能够根据温度感应装置采集的温度值与预设值A进行比较,从而判断冲压部位作用冲压产品的冲压力度以及行程产生热量是否达到预设值B;或/和,根据碎屑吸附装置收集的金属碎屑质量与预设值C进行比较,判断冲压产品是否达标。
优选地,所述碎屑吸附装置安装在所述移动机体(1)上,碎屑吸附装置的吸附头在第一驱动装置的作用下能够移动至机床各个作业区域。
优选地,所述清洗装置安装在所述移动机体(1)上,所述清洗装置的清洗枪在第二驱动装置的作用下能够移动至机床各个作业区域。
优选地,所述碎屑吸附装置包括气泵、集装筒(4),集装筒(4)的吸尘口(401)与可移动吸附头连接,气泵通过吸附头将机床表面金属碎屑吸入集装筒(4)中,所述集装筒(4)中设有计量装置。
优选地,所述碎屑吸附装置还包括集尘箱(601),所述集装筒(4)中设置有过滤器(11),所述过滤器(11)将过滤后的金属碎屑送入所述集尘箱(601)中存储。
优选地,所述清洗装置包括清洗液储放罐(12)、微型泵(1201)和清洗枪(7),清洗枪(7)通过可伸缩的真空胶管(702)连接清洗液储放罐(12)。
优选地,所述移动机体(1)的顶部固定有底座(3),底座(3)的顶部镶嵌有集装筒(4),底座(3)的后端安装有隔音板(5),集装筒(4)的前端连接有清洗枪(7)。
一种机床自动清理检测机器人的自动检测清理方法,包括以下步骤:
步骤1、机床冲压完之后,冲压部件移离机床;步骤2、机床自动清理检测机器人的控制装置启动温度感应装置对机床上的冲压部位的温度数值进行采集,将温度感应装置采集的温度值与预设值A进行比较,从而判断冲压部位作用冲压产品的冲压力度、行程产生热量是否达到预设值B,如果达到预设值B则说明冲压质量符合标准;反之,则说明冲压质量可能未达标,控制装置启动报警器告知操作人员对冲压产品进行质检;步骤3、控制装置启动移动机体(2)围绕机床移动,同时启动碎屑吸附装置对机床上的金属碎屑进行收集,收集完毕关闭碎屑吸附装置;步骤4、控制装置启动清洗装置对机床表面污物进行液体清理。上述预设值A、B可以为数值区间。
一种机床自动清理检测机器人的自动检测清理方法,包括以下步骤:
步骤1、机床冲压完之后,冲压部件移离机床;步骤2、控制装置启动移动机体(2)围绕机床移动,同时启动碎屑吸附装置对机床上的金属碎屑进行收集,收集完毕关闭碎屑吸附装置;收集的金属碎屑进行质量检测,控制装置根据碎屑吸附装置收集的金属碎屑质量与预设值C进行比较,判断冲压产品是否达标;当碎屑吸附装置收集的金属碎屑质量达到预设值C时,说明冲压质量符合要求;当碎屑吸附装置收集的金属碎屑质量大于或小于预设值C时,说明冲压过度或冲压不足,控制装置启动报警器告知操作人员对冲压产品进行质检;步骤4、控制装置启动清洗装置对机床表面污物进行液体清理。上述预设值A、B和C可以为数值区间。
一种机床自动清理检测机器人的自动检测清理方法,包括以下步骤:
步骤1、机床冲压完之后,冲压部件移离机床;步骤2、机床自动清理检测机器人的控制装置启动温度感应装置对机床上的冲压部位的温度数值进行采集,将温度感应装置采集的温度值与预设值A进行比较,从而判断冲压部位作用冲压产品的冲压力度、行程产生热量是否达到预设值B,如果达到预设值B则说明冲压质量符合标准;反之,则说明冲压质量可能未达标;步骤3、控制装置启动移动机体(2)围绕机床移动,同时启动碎屑吸附装置对机床上的金属碎屑进行收集,收集完毕关闭碎屑吸附装置;收集的金属碎屑进行质量检测,控制装置根据碎屑吸附装置收集的金属碎屑质量与预设值C进行比较,判断冲压产品是否达标;当碎屑吸附装置收集的金属碎屑质量达到预设值C时,说明冲压质量符合要求;当碎屑吸附装置收集的金属碎屑质量大于或小于预设值C时,说明冲压过度或冲压不足;步骤4、如果步骤2和步骤3同时表明冲压质量未达标时,控制装置启动报警器告知操作人员对冲压产品进行质检;步骤5、控制装置启动清洗装置对机床表面污物进行液体清理。上述预设值A、B和C可以为数值区间。
该机床自动清理检测机器人及其自动清理检测方法具有以下有益效果:
(1)本发明不仅仅可以对机床上的金属碎屑和油污进行有效处理,而且同时还可以根据冲压部件的温度以及金属碎屑的质量判断冲压产品的质量,使得清理和质检同步进行,节省的工艺步骤,提高了生产效率。
(2)本发明清洗液储放罐内部的清洗液通过真空胶管导入清洗枪的内部,而清洗液在通过喷头喷洒清洗液时通过自动切换阀能够调整喷头的喷洒形式,从而使得装置能灵活调节对机床不同位置配件的清洗强度,不仅限于使用统一压强的水压进行冲刷,有效避免造成部分相对脆弱的零部件出现损坏,不仅规避数控机床后续使用因出现故障而需要维修,而且减少了数控机床在作业时的安全隐患。
(3)本发明对机床表面金属碎屑清理的过程中能够通过过滤器表面的滤孔将灰尘进行过滤的同时能够有效将灰尘进行吸附,避免灰尘飞扬而重新落入机床表面,而过滤器吸附后的灰尘通过导管导入集尘箱的内部,使得数控机床在进行清理时装置能同时对机床残留的灰尘进行统一清理,避免清洗液在进行冲刷时灰尘与油污产生混合,有效减少装置对机床的清理难度,不需要后期二次耗费人力时间进行处理。
附图说明
图1:本发明机床自动清理检测机器人的立体结构示意图;
图2:本发明机床自动清理检测机器人的清洗枪结构示意图;
图3:本发明中抽吸泵和集尘箱的结构示意图;
图4:图3中A处结构放大示意图;
图5:本发明集装筒剖面结构示意图;
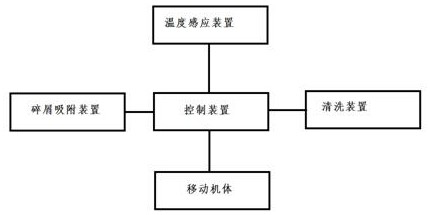
图6:本发明机床自动清理检测机器人的控制模块示意图;
附图标记说明:
1—移动机体;2—滚动轮;201—联动轴;202—移动履带;3—底座;4—集装筒;401—吸尘口;402—支耳;5—隔音板;501—开孔;502—推动拉杆;6—垫板;601—集尘箱;7—清洗枪;701—连接部;702—真空胶管;703—切换阀;704—喷头;8—抽吸泵;801—密封环;802—固定螺杆;9—连通件;901—连接管;902—排放管;10—固定架;1011—定位锚;1012—自动开关阀;1013—拉力杆;11—过滤器;1101—导管;1102—滤孔;12—清洗液储放罐;1201—微型泵;1202—添加口。
具体实施方式
下面结合图1至图6,对本发明做进一步说明:
如图1所示,一种用于数控机床清理设备,包括移动机体1、滚动轮2和底座3,移动机体1的左右两侧均安装有滚动轮2,移动机体1的顶部固定有底座3。
底座3的顶部镶嵌有集装筒4,底座3的后端安装有隔音板5,底座3的顶部后端安装有垫板6,集装筒4的前端衔接有清洗枪7,垫板6的顶部安装有抽吸泵8,垫板6的顶部中间贯通连接有连通件9,清洗枪7的表面安装有固定架10,集装筒4的内部放置有过滤器11,集装筒4的内部放置有清洗液储放罐12。
滚动轮2的中间安装有一体化设置的联动轴201,且滚动轮2呈双排同步滚动设置,滚动轮2的表面包覆有移动履带202,隔音板5的表面设有用于消音的开孔501,且隔音板5的前端设有环形推动拉杆502。
滚动轮2在进行滚动时能够通过中间的联动轴201带动进行同步滚动,从而确保双排设置的滚动轮2能够保持相同速度进行滚动,使得装置整体在拉动推动拉杆502进行移动时在更加省时省力,而且通过滚动轮表面的移动履带202能够有效提高装置在路面移动时的抓地力,而且装置通过隔音板5表面的开孔501进行消音,避免装置作业时的噪音对工作人员造成不适。
集装筒4的表面设有支耳402,且集装筒4的表面上端设有吸尘口401,垫板6的下端设有集尘箱601,且集尘箱601与集装筒4连通。
通过使用起吊机抓取支耳402能够将集装筒4取出进行回收处理,而且通过将气泵一端的抽吸管衔接吸尘口401的方式能够将机床表面碎屑由吸尘口401吸入,并通过吸尘口401的引导将碎屑统一导入集装筒4。吸尘口401通过软管与可移动吸附头连接,吸附头在第一驱动装置的作用下能够移动至机床各个作业区域。
抽吸泵8的上下两端的拼接处均设有密封环801,且密封环801的表面安装有等距环绕状分布的固定螺杆802,连通件9的顶部设有贯通于抽吸泵8的连接管901,且连通件9的前端设有排放管902。
抽吸泵8在整体拼接组装完成后通过将密封环801表面固定螺杆802拧紧的方式能够将抽吸泵8进行密封,避免抽吸泵8在抽吸过程中产生渗漏的问题,而且抽吸泵8产生的吸力能够通过连接管901导入连通件9的内部,使得连通件9能够通过排放管902将气压排出,便于后续对清洗液的抽取工作。
清洗枪7的底部安装有连接部701,且连接部701的底部设有具有韧性的真空胶管702,清洗枪7的前端设有可自动切换的切换阀703,且清洗枪7的前端设有喷头704。
连接部701通过可以伸缩的真空胶管702连接清洗液储放罐12的方式将清洗枪7与清洗液储放罐12连接,而清洗液储放罐12内部的清洗液通过真空胶管702导入清洗枪7的内部,而清洗液在通过喷头704喷洒清洗液时通过切换阀703能够调整喷头704的喷洒形式,从而使得装置能灵活调节对数控机床不同位置配件的清洗强度,不仅限于使用统一压强的水压进行冲刷,有效避免造成部分相对脆弱的零部件出现损坏,不仅规避数控机床后续使用因出现故障而需要维修,而且减少了数控机床在作业时的安全隐患。除此之外,清洗枪7在第二驱动装置的作用下能够移动至机床各个作业区域。
固定架10的后端安装有拧入清洗枪7背面的定位锚1011,固定架10的前端安装有自动开关阀1012,且固定架10的顶部设有拉力杆1013。
当固定架10放置在安装位置后通过将定位锚1011拧入固定架10与清洗枪7衔接处的方式能够将固定架10进行安装,当固定架10安装完成后通过自动开关阀1012能够带动固定架10上端拉力杆1013进行收缩,使得高压水流能够顺利进入清洗枪7的内部,并喷出完成清洗工作。自动开关阀1012可以为多种,比如通过通电产生磁吸的方式将拉力杆1013进行收缩。
过滤器11的表面设有环绕状分布的圆形滤孔1102,且过滤器11的顶部设有导管1101,且导管1101的一端与集尘箱601衔接。
当装置通过吸尘口401将机床表面碎屑清理的过程中能够通过过滤器11表面的滤孔1102将碎屑进行过滤的同时能够有效将碎屑进行吸附,避免碎屑飞扬而重新落入机床表面,而过滤器11吸附后的碎屑通过导管1101导入集尘箱601的内部,使得数控机床在进行清理时装置能同时对机床残留的碎屑进行统一清理,避免清洗液在进行冲刷时碎屑与油污产生混合,有效减少装置对机床的清理难度,不需要后期二次耗费人力时间进行处理。
清洗液储放罐12的表面安装有微型泵1201,且微型泵1201的表面衔接有贯通于清洗液储放罐12的导管1101,清洗液储放罐12的表面设有添加口1202。
微型泵1201内部产生的吸力能够通过导管1101导入清洗液储放罐12,使得清洗液储放罐12内部的清洗液能够通过导管1101导入的高气压进行排放,当清洗液储放罐12内部清洗液到达下限时通过将添加设备对准添加口1202的方式进行清洗液添加工作。
使用时,滚动轮2在进行滚动时能够通过中间的联动轴201带动进行同步滚动,从而确保双排设置的滚动轮2能够保持相同速度进行滚动,使得装置整体在拉动推动拉杆502进行移动时在更加省时省力,而且通过滚动轮表面的移动履带202能够有效提高装置在路面移动时的抓地力。
通过隔音板5表面的开孔501进行消音,避免作业时的噪音对工作人员造成不适。
通过使用起吊机抓取支耳402能够将集装筒4取出进行回收处理,吸尘口401与可移动吸附头连接,吸附头在第一驱动装置的作用下能够移动至机床各个作业区域。通过将气泵一端的抽吸管衔接吸尘口401的方式能够将机床表面碎屑由吸尘口401吸入,并通过吸尘口401的引导将碎屑统一导入集尘箱601内部进行统一回收。
而清洗液储放罐12内部的清洗液通过真空胶管702导入清洗枪7的内部,清洗枪7在第二驱动装置的作用下能够移动至机床各个作业区域。清洗液在通过喷头704喷洒清洗液时通过切换阀703能够调整喷头704的喷洒形式,从而使得装置能灵活调节对数控机床不同位置配件的清洗强度,不仅限于使用统一压强的水压进行冲刷,有效避免造成部分相对脆弱的零部件出现损坏,不仅规避数控机床后续使用因出现故障而需要维修,而且减少了数控机床在作业时的安全隐患。
当固定架10放置在安装位置后通过将定位锚1011拧入固定架10与清洗枪7衔接处的方式能够将固定架10进行安装,当固定架10安装完成后通过按压自动开关阀1012的方式能够带动固定架10上端拉力杆1013进行收缩,使得高压水流能够顺利进入清洗枪7的内部,并喷出完成清洗工作,且装置通过吸尘口401将机床表面碎屑清理的过程中能够通过过滤器11表面的滤孔1102将碎屑进行过滤的同时能够有效将碎屑进行吸附,避免碎屑飞扬而重新落入机床表面,而过滤器11吸附后的碎屑通过导管1101导入集尘箱601的内部,使得数控机床在进行清理时装置能同时对机床残留的碎屑进行统一清理,避免清洗液在进行冲刷时碎屑与油污产生混合,有效减少装置对机床的清理难度,不需要后期二次耗费人力时间进行处理,微型泵1201内部产生的吸力能够通过导管1101导入清洗液储放罐12,使得清洗液储放罐12内部的清洗液能够通过导管1101导入的高气压进行排放,当清洗液储放罐12内部清洗液到达下限时通过将添加设备对准添加口1202的方式进行清洗液添加工作。
如图6所示,一种机床自动清理检测机器人,包括移动机体,其能够围绕机床移动至不同的清理位置;温度感应装置,其能够对机床上的冲压部位的温度数值进行采集;碎屑吸附装置,其能够对机床上的金属碎屑进行收集并且进行重量检测;清洗装置,其能够对机床表面污物进行液体清理;控制装置,其不仅仅能够控制移动机体、温度感应装置、碎屑吸附装置以及清洗装置的开启或停止,而且还能够根据温度感应装置采集的温度值与预设值A进行比较,从而判断冲压部位作用冲压产品的冲压力度以及行程产生热量是否达到预设值B;根据碎屑吸附装置收集的金属碎屑质量与预设值C进行比较,判断冲压产品是否达标。
本发明机床自动清理检测机器人存在三种工作原理:
第一种:步骤1、机床冲压完之后,冲压部件移离机床;步骤2、机床自动清理检测机器人的控制装置启动温度感应装置对机床上的冲压部位的温度数值进行采集,将温度感应装置采集的温度值与预设值A进行比较,从而判断冲压部位作用冲压产品的冲压力度、行程产生热量是否达到预设值B,如果达到预设值B则说明冲压质量符合标准;反之,则说明冲压质量可能未达标,控制装置启动报警器告知操作人员对冲压产品进行质检;步骤3、控制装置启动移动机体2围绕机床移动,同时启动碎屑吸附装置对机床上的金属碎屑进行收集,收集完毕关闭碎屑吸附装置;步骤4、控制装置启动清洗装置对机床表面污物进行液体清理。
第二种:步骤1、机床冲压完之后,冲压部件移离机床;步骤2、控制装置启动移动机体2围绕机床移动,同时启动碎屑吸附装置对机床上的金属碎屑进行收集,收集完毕关闭碎屑吸附装置;收集的金属碎屑进行质量检测,控制装置根据碎屑吸附装置收集的金属碎屑质量与预设值C进行比较,判断冲压产品是否达标;当碎屑吸附装置收集的金属碎屑质量达到预设值C时,说明冲压质量符合要求;当碎屑吸附装置收集的金属碎屑质量大于或小于预设值C时,说明冲压过度或冲压不足,控制装置启动报警器告知操作人员对冲压产品进行质检;步骤4、控制装置启动清洗装置对机床表面污物进行液体清理。
第三种:步骤1、机床冲压完之后,冲压部件移离机床;步骤2、机床自动清理检测机器人的控制装置启动温度感应装置对机床上的冲压部位的温度数值进行采集,将温度感应装置采集的温度值与预设值A进行比较,从而判断冲压部位作用冲压产品的冲压力度、行程产生热量是否达到预设值B,如果达到预设值B则说明冲压质量符合标准;反之,则说明冲压质量可能未达标;步骤3、控制装置启动移动机体2围绕机床移动,同时启动碎屑吸附装置对机床上的金属碎屑进行收集,收集完毕关闭碎屑吸附装置;收集的金属碎屑进行质量检测,控制装置根据碎屑吸附装置收集的金属碎屑质量与预设值C进行比较,判断冲压产品是否达标;当碎屑吸附装置收集的金属碎屑质量达到预设值C时,说明冲压质量符合要求;当碎屑吸附装置收集的金属碎屑质量大于或小于预设值C时,说明冲压过度或冲压不足;步骤4、如果步骤2和步骤3同时表明冲压质量未达标时,控制装置启动报警器告知操作人员对冲压产品进行质检;步骤5、控制装置启动清洗装置对机床表面污物进行液体清理。
上面结合附图对本发明进行了示例性的描述,显然本发明的实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围内。
- 一种机床自动清理检测机器人及其自动清理检测方法
- 一种具有摄像头自动清理机构的隧道壁面检测机器人