一种基于图像处理与路面附着系数相结合的制动距离计算方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及计算机和交通领域,尤其是涉及一种基于图像处理与路面附着系数相结合的制动距离计算方法。
背景技术
较好地估计路面的附着系数一直是保障行车安全的关键问题。路面附着系数主要影响车辆的动力性和制动性;如果能实时且精准地获得当前路面的附着系数,则可以大大减少雨雪天的交通事故数量,极大的改善车辆行驶的安全性。目前,路面附着系数的估计方法主要有三种:
第一种是通过传感器采集数据,建立传感器(声、光、温度传感器等)数据与路面附着系数的关系来进行估计。此类方法探测范围广,但传感器价格昂贵且易受环境影响。
第二种是基于动力学响应的估算方法,根据系统响应和数学模型进行估计。采用动力学建模的方法进行路面附着系数估计虽然准确可靠,但是由于模型较为复杂,大量参数难以准确获取,实时性难以保证。
第三种是基于机器视觉传感器借助深度学习手段的直接估算路面附着系数。该方法弥补了前两种方法的缺陷,有一定的超前预测性,然而只是估计路面整体的附着系数,并没有对路面局部进行附着系数估计,例如路面积水、路面积雪、路面结冰等。
发明内容
为了克服现有的技术的不足,并将路面附着系数应用于车辆防追尾模型中,本发明提出了一种基于图像处理与路面附着系数相结合的制动距离计算方法。
本发明为解决现有技术的不足采用以下技术方案:一种基于图像处理与路面附着系数相结合的制动距离计算方法,包括以下步骤:
步骤1:采集各种路况环境下的路面图像,建立路面类型数据集,并划分为训练集、测试集和验证集,每类数据集都包含所有路况下的若干图像;
步骤2:对数据集进行图像预处理,对预处理后的路面图像进行特征提取,并标记相应的路面类型,完善数据集;
步骤3:搭建卷积神经网络,将采集的路面图像作为网络的输入,所属路面类型标签作为网络的输出,使用训练集训练神经网络参数;
步骤4:使用验证集对神经网络进行验证,若网络输出误差超过阈值范围,则继续训练神经网络,直至误差在阈值范围内,得到路面类型识别模型;
步骤5:利用路面类型识别模型识别测试集中图像的路面类型,将路面类型与路面附着系数先验知识相结合,估算出该路面的附着系数;
步骤6:将步骤5所得到的路面附着系数带入制动距离模型,得到含路面附着系数的制动距离。
作为优选,所述步骤1中,所述路况环境包括干燥路况、潮湿路况、积水路况、积雪路况;通过路面监控摄像头采集各种路况下的路面图像。
作为优选,所述步骤2中,采用平均值灰度化方法进行图像数据预处理。
作为优选,所述步骤2中,提取各路面类型图像的颜色、纹理、形状及空间特征,其中,采用灰度共生矩阵提取图像纹理特征;
数学表达式如下:
P(i,j|d,θ)={(x,y)|f(x,y)=i,f(x+d
其中,P(i,j|d,θ)为从灰度为i的像素点出发,距离(d
作为优选,所述步骤6中,制动距离模型如下:
其中L为后车制动距离;V
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
1.本发明弥补了基于动力学方法和借助深度学习手段的基于视觉的方法的缺点,为智能车辆及智能机器的路径规划和决策提供了先决条件。
2.采用卷积神经网络算法模型,实时性好,很大程度提高了系统的安全性。
3.对采集的数据集进行预处理,大大缩减了采集图像数据的时间成本和经济成本。
附图说明
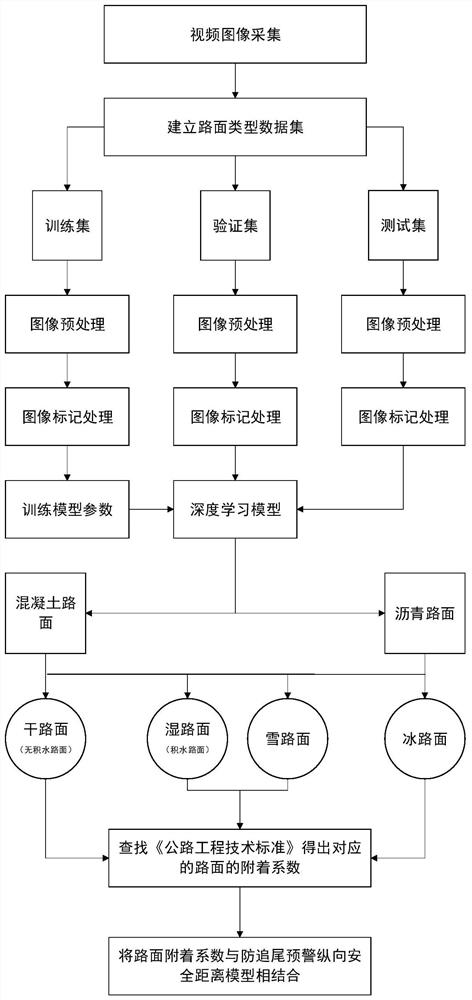
图1为本发明方法的总流程示意图;
图2为本发明实施例卷积神经元示意图;
图3为本发明实施例深度学习算法图像识别流程图;
图4为本发明实施例图片像素数据间几何关系示意图。
具体实施方式
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
本发明所述的一种基于图像处理与路面附着系数相结合的制动距离计算方法,流程如图1所示,具体实现包括以下步骤:
步骤1:采集各种路况环境下的路面图像,建立路面类型数据集,并划分为训练集、测试集和验证集,每类数据集都包含所有路况下的若干图像;
所述路况环境包括干燥路况、潮湿路况、积水路况、积雪路况;通过路面监控摄像头采集各种路况下的路面图像;路面监控摄像头包括网络摄像头和USB摄像头;
选择1280*960像素构成并包含晴、雨、雪天气的图像构建路面类型数据集。
步骤2:由于建立的路面类型数据集样本数量大,高像素、色彩复杂,为提高对图像处理的速度,减少处理的数据量,采用平均值灰度化方法对数据集进行图像预处理,图像平均值灰度化数学公式如下:
f(i,j)=[R(i,j)+G(i,j)+B(i,j)]/3
其中f(i,j)表示灰度图像,R、G、B表示色彩图像的三种颜色通道;i,j表示图像中像素点位置;
对预处理后的路面图像进行特征提取,提取各路面类型图像的颜色、纹理、形状及空间特征,并标记相应的路面类型,完善数据集;
图像特征提取的好坏对图像识别,目标检测技术的结果有至关重要的影响,决定了后期算法识别的准确性;其中主要是图像纹理特征的提取,本实施例采用灰度共生矩阵提取图像纹理特征;数学表达式如下:
P(i,j|d,θ)={(x,y)|f(x,y)=i,f(x+d
其中,P(i,j|d,θ)为从灰度为i的像素点出发,距离(d
步骤3:搭建卷积神经网络,将采集的路面图像作为网络的输入,所属路面类型标签作为网络的输出,使用训练集训练神经网络参数;
搭建的卷积神经网络主要是模拟人类大脑处理视觉的算法模型,而大脑处理视觉信息关键得是神经元,计算机抽象模拟神经元示意参见图2;
该神经元共有三个输入量(x
由前向传播算法推出该神经元输出公式
步骤4:使用验证集对神经网络进行验证,若网络输出误差超过阈值范围,则继续训练神经网络,直至误差在阈值范围内,得到路面类型识别模型。
步骤5:利用路面类型识别模型识别测试集中图像的路面类型,将路面类型与路面附着系数先验知识相结合,估算出该路面的附着系数;
《公路工程技术标准》中路面附着系数如表1。
表1
步骤6:将步骤5所得到的路面附着系数带入制动距离模型,得到含路面附着系数的制动距离。
制动距离模型如下:
其中L为后车制动距离;V
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种基于图像处理与路面附着系数相结合的制动距离计算方法
- 一种高速列车制动距离计算方法及系统