一种基于车路云协同优化车速的控制方法
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及道路交通控制技术领域,尤其是涉及一种基于车路云协同优化车速的控制方法。
背景技术
在频繁的红绿灯路口,车辆需要不断经历起步、加速、制动的循环过程,导致城市交通效率低下的同时,大大增加了车辆的燃油/能耗消耗率。目前在道路绿波效应的领域内通常关注对信号灯相位的控制上,如中国专利CN110047303B公布了一种提高双向绿波控制中绿波带带宽的相位相序调整方法,能够降低主干道双向车辆在交叉口总体停车次数,提高主干道的主干道通行效率。但无法保证其他道路车辆的绿波效应,造成顾此失彼的问题。此外,现有技术中对于车路云协同绿波效应降低车辆油耗/能耗的控制方法的记载也较少。
发明内容
本发明的目的就是为了克服上述现有技术存在的频繁启动和制动导致车辆的燃油/能耗消耗率较高的缺陷而提供一种基于车路云协同优化车速的控制方法。
本发明的目的可以通过以下技术方案来实现:
一种基于车路云协同优化车速的控制方法,具体包括以下步骤:
S1、车路云协同定位模块根据获取的多源定位信息计算得到车辆实时位置,并计算出车辆到前方路口信号灯的实时距离;
S2、车路云协同感知模块根据车辆实时位置,通过获取的多源感知信息计算出车辆通过相应路口时信号灯为绿灯的适宜车速区间;
S3、云端预测控制模块通过基于燃油/能耗经济性的车速优化的目标模型,根据适宜车速区间计算得到实时最优车速;
S4、所述实时最优车速反馈至云端控制器,由云端控制器发送实时最优车速至车端控制器,由车端控制器根据实时最优车速对车辆进行控制,重复步骤S1~S3,实现车速滚动优化。
所述多源定位信息包括车端定位信息和路端定位信息,所述车端定位信息包括车辆周边环境特征信息、车辆运动信息和GPS定位信息,所述路端定位信息包括道路标识信息和路端相对位置信息。
进一步地,所述车辆周边环境特征信息、车辆运动信息和GPS定位信息由车端控制器通过摄像头、激光雷达、轮速计、方向盘转角传感器和RTK-GPS传感器采集得到。
进一步地,所述道路标识信息和路端相对位置信息由路端控制器通过摄像头和激光雷达采集得到,路端相对位置信息具体为车辆相对于路端设备的位置信息。
进一步地,所述车路云协同定位模块与云端控制器连接,所述云端控制器中设有高精度地图,云端控制器根据车辆周边环境特征信息匹配高精度地图获取第一实时位置参考信息,根据车辆运动信息和GPS定位信息获取第二实时位置参考信息,根据路端相对位置信息匹配高精度地图获取第三实时位置参考信息。
进一步地,所述云端控制器根据第一实时位置参考信息、第二实时位置参考信息和第三实时位置参考信息进行融合定位,得到车辆实时位置。
所述多源感知信息包括车端感知道路信息和路端感知道路信息,所述车端感知道路信息包括车流量平均车速信息,所述路端感知道路信息包括路况信息。
进一步地,所述车流量平均车速信息和路况信息由车端控制器和路端控制器通过摄像头和激光雷达采集得到。
进一步地,所述车路云协同感知模块与云端控制器连接,所述云端控制器中设有高精度地图,云端控制器获取信号灯实时状态信息和高精度地图中的车道限速信息,根据信号灯实时状态信息得到信号灯绿波相位时间,结合车辆到前方路口信号灯的实时距离,根据所述车道限速信息、车流量平均车速信息和路况信息,计算出车辆通过相应路口时信号灯为绿灯的适宜车速区间。
所述基于燃油/能耗经济性的车速优化的目标模型根据适宜车速区间,采用模型预测控制算法,计算得到实时最优车速。
所述实时最优车速具体为最优的发动机输出扭矩及相应车速。
所述基于燃油/能耗经济性的车速优化的目标模型包括车速预测模型和燃油/能耗消耗率模型,计算公式如下所示:
其中,J为目标模型,P为预测时域,Δt为预测时域内的每一步向前预测的步长,f为燃油/能耗消耗率,i为优化轮次,k为当前的汽车状态。
进一步地,所述车速预测模型基于车辆在行驶过程中的受力信息建立,受力信息包括牵引力、空气阻力、滚动阻力和坡度阻力,所述燃油/能耗消耗率模型基于车辆纵向车速与发动机输出扭矩建立。
进一步地,所述车速预测模型的计算公式具体如下所示:
其中,
与现有技术相比,本发明具有以下有益效果:
1.本发明通过基于燃油/能耗经济性的车速优化的目标模型根据车辆实时位置和通过相应路口时信号灯为绿灯的适宜车速区间,计算出实时最优车速,由车端控制器保证车辆按照实时最优车速进行行驶,有效降低了车辆燃油/能耗消耗率。
2.本发明利用车路云协同定位模块与车路云协同感知模块,实时计算出车辆通过相应路口时信号灯为绿灯的适宜车速区间,由车端控制器辅助调整车辆的行驶速度,有效提高了交通道路的通行效率。
附图说明
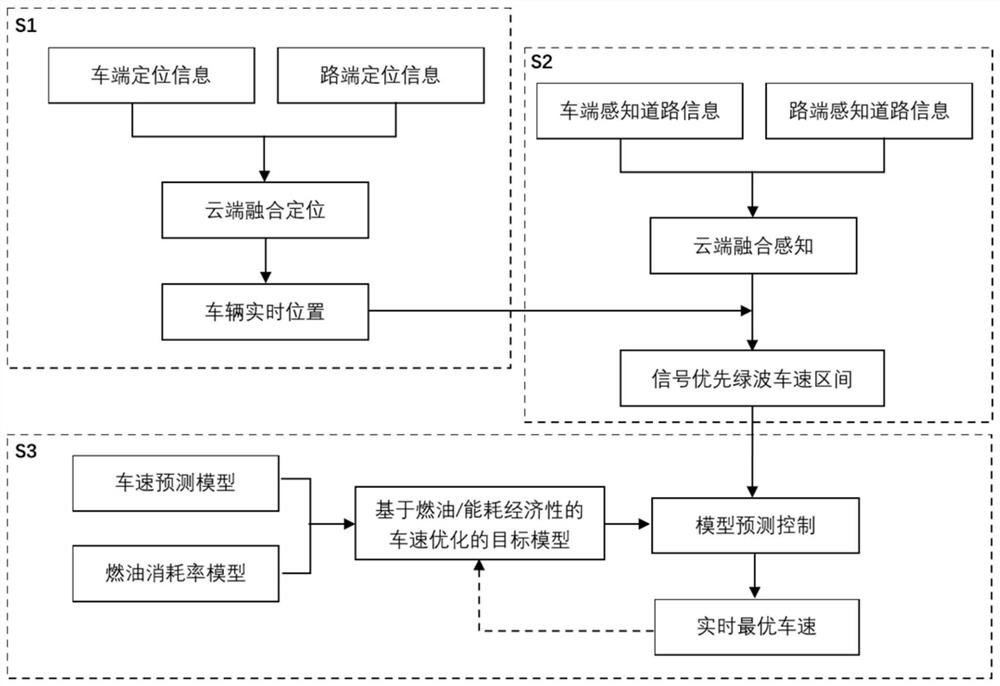
图1为本发明实施例中控制方法的原理示意图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例
如图1所示,一种基于车路云协同优化车速的控制方法,具体包括以下步骤:
S1、车路云协同定位模块根据获取的多源定位信息计算得到车辆实时位置,并计算出车辆到前方路口信号灯的实时距离;
S2、车路云协同感知模块根据车辆实时位置,通过获取的多源感知信息计算出车辆通过相应路口时信号灯为绿灯的适宜车速区间;
S3、云端预测控制模块通过基于燃油/能耗经济性的车速优化的目标模型,根据适宜车速区间计算得到实时最优车速;
S4、实时最优车速反馈至云端控制器,由云端控制器发送实时最优车速至车端控制器,由车端控制器根据实时最优车速对车辆进行控制,重复步骤S1~S3,实现车速滚动优化。
多源定位信息包括车端定位信息和路端定位信息,车端定位信息包括车辆周边环境特征信息、车辆运动信息和GPS定位信息,路端定位信息包括道路标识信息和路端相对位置信息。
车辆周边环境特征信息、车辆运动信息和GPS定位信息由车端控制器通过摄像头、激光雷达、轮速计、方向盘转角传感器和RTK-GPS传感器采集得到。
道路标识信息和路端相对位置信息由路端控制器通过摄像头和激光雷达采集得到,路端相对位置信息具体为车辆相对于路端设备的位置信息。
车路云协同定位模块与云端控制器连接,云端控制器中设有高精度地图,云端控制器根据车辆周边环境特征信息匹配高精度地图获取第一实时位置参考信息,根据车辆运动信息和GPS定位信息获取第二实时位置参考信息,根据路端相对位置信息匹配高精度地图获取第三实时位置参考信息。
云端控制器根据第一实时位置参考信息、第二实时位置参考信息和第三实时位置参考信息进行融合定位,得到车辆实时位置。
多源感知信息包括车端感知道路信息和路端感知道路信息,车端感知道路信息包括车流量平均车速信息,路端感知道路信息包括路况信息。
车流量平均车速信息和路况信息由车端控制器和路端控制器通过摄像头和激光雷达采集得到。
车路云协同感知模块与云端控制器连接,云端控制器中设有高精度地图,云端控制器获取信号灯实时状态信息和高精度地图中的车道限速信息,根据信号灯实时状态信息得到信号灯绿波相位时间,结合车辆到前方路口信号灯的实时距离,根据车道限速信息、车流量平均车速信息和路况信息,计算出车辆通过相应路口时信号灯为绿灯的适宜车速区间,适宜车速区间具体为信号优先绿波车速区间。
实时最优车速具体为最优的发动机输出扭矩及相应车速。
基于燃油/能耗经济性的车速优化的目标模型包括车速预测模型和燃油/能耗消耗率模型,计算公式如下所示:
其中,J为目标模型,P为预测时域,Δt为预测时域内的每一步向前预测的步长,f为燃油/能耗消耗率,i为优化轮次,k为当前的汽车状态。
车速预测模型基于车辆在行驶过程中的受力信息建立,受力信息包括牵引力、空气阻力、滚动阻力和坡度阻力,燃油/能耗消耗率模型基于车辆纵向车速与发动机输出扭矩建立。
车速预测模型的计算公式具体如下所示:
其中,
本实施例中,以发动机燃油消耗率为例,燃油/能耗消耗率模型具体如下所示:
基于燃油/能耗经济性的车速优化的目标模型根据适宜车速区间,采用模型预测控制算法,计算得到实时最优车速,经过滚动优化与实时控制,由云端控制器将输出扭矩值反馈到车端控制器,从而使车辆实现了绿波通行与最佳燃油/能耗经济性的最优车速控制。
此外,需要说明的是,本说明书中所描述的具体实施例,所取名称可以不同,本说明书中所描述的以上内容仅仅是对本发明结构所做的举例说明。凡依据本发明构思的构造、特征及原理所做的等效变化或者简单变化,均包括于本发明的保护范围内。本发明所属技术领域的技术人员可以对所描述的具体实例做各种各样的修改或补充或采用类似的方法,只要不偏离本发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
- 一种基于车路云协同优化车速的控制方法
- 一种基于车路协同的智能车速控制方法及系统