一种自动装PCBA板入治具设备
文献发布时间:2023-06-19 12:27:31
技术领域
本发明涉及PCB装治具料技术领域,特别是涉及一种自动装PCBA板入治具设备。
背景技术
自动化技术广泛用于工业、农业、军事、科学研究、交通运输、商业、医疗、服务和家庭等方面。采用自动化技术不仅可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,而且能扩展人的器官功能,极大地提高劳动生产率,增强人类认识世界和改造世界的能力。自动化系统中的大型成套设备,又称自动化装置。是指机器或装置在无人干预的情况下按规定的程序或指令自动进行操作或控制的过程。
其中,PCB板在自动化生产过程中,一般包括输送、取料、翻板、装板等动作,在取料过程中,现有对PCB板取料精度和稳定性较难掌握,尤其是很难能做到在一个取料机构上适应多种或不同大小的PCB板进行抓取,导致适应范围小,在取料精度和稳定性上也较差,尤其是很难将PCB板准确抓取装入治具,一般是人工操作,生产效率较低。
发明内容
为解决上述问题,本发明提供一种整体自动化程度高,节省人力物力,装料精度高的自动装PCBA板入治具设备。
本发明所采用的技术方案是:一种自动装PCBA板入治具设备,包括机架、安装于机架的输入机构、安装于机架并位于输入机构一侧的取料机器人、安装于取料机器人的驱动端的取料机构、安装于机架的输出机构、及设于输出机构的装料载具,所述取料机器人驱动取料机构在输入机构上取料装入至装料载具,所述输出机构将装料载具输出,所述取料机构包括基板、安装于基板的驱动装置、可活动安装于基板并与驱动装置连接的主动夹持元件、可活动安装于基板的从动夹持元件、及将所述主动夹持元件与从动夹持元件联动的同步传动装置;所述主动夹持元件与从动夹持元件之间形成一夹持位。
对上述方案的进一步改进为,所述输入机构包括输入调节组件、设于输入调节组件的输入输送组件、及设于输入输送组件下方的顶起定位组件,所述输入调节组件包括固定架、调节架、及设于调节架并与固定架连接的调节螺杆,所述调节螺杆设有调节面板。
对上述方案的进一步改进为,所述输入输送组件包括第一输送轮组和第二输送轮组,所述第一输送轮组设于调节架,所述第二输送轮组设于调节面板、且与第一输送轮组相对设置;
所述顶起定位组件包括顶升气缸、安装于顶升气缸的顶升板、设于顶升板的定位销及设于顶升板外沿的定位柱、所述定位柱开设有定位台阶,所述定位台阶开设有导向斜面;
所述顶起定位组件还包括限位气缸,所述限位气缸连接有限位挡板。
对上述方案的进一步改进为,所述取料机器人包括机器人底座、安装于机器人底座的第一驱动座、连接于第一驱动座的第一摆臂、连接于第一摆臂的第二驱动座、连接于第二驱动座的第二摆臂、及设于第二摆臂的驱动轴,所述驱动轴与取料机构连接。
对上述方案的进一步改进为,所述基板安装有连接柱,所述连接柱开设有连接孔,所述连接柱开设有切槽,所述切槽连通至连接孔,所述连接柱一侧开设有锁紧螺纹孔,所述锁紧螺纹孔贯通与切槽;所述基板一侧安装有位置感应器,所述位置感应器对应设有位置感应片,所述位置感应片安装于主动夹持元件、和/或安装于从动夹持元件,所述基板安装有物料感应器,所述物料感应器朝向于夹持位。
对上述方案的进一步改进为,驱动装置包括安装于基板的驱动底座、安装于驱动底座的驱动电机、安装于驱动底座并与驱动电机连接的传动螺杆、及连接于传动螺杆并可跟随传动螺杆传动的传动座,所述传动座与主动夹持元件连接;所述驱动电机为伺服电机,所述驱动电机的驱动端设有联轴器,所述联轴器与传动螺杆连接。
对上述方案的进一步改进为,所述主动夹持元件包括与基板连接的主动滑轨、可滑动安装于主动滑轨的主动夹持板、安装于主动夹持板的主动夹爪,所述主动夹爪开设有主动夹槽,所述主动夹持板与驱动装置连接;所述主动夹持板延伸有主动连接座,所述主动夹爪安装于主动连接座,所述主动夹持板一侧安装有主动连接块,所述主动连接块连接有主动压块,所述主动压块将第一往复传动部固定于主动连接块;所述主动夹爪的端面开设有主动夹持定位孔,所述主动夹持定位孔贯通于主动夹槽,所述主动夹持定位孔安装有主动夹持定位轴。
对上述方案的进一步改进为,所述从动夹持元件包括与基板连接的从动滑轨、可滑动安装于从动滑轨的从动夹持板、安装于从动夹持板的从动夹爪,所述从动夹爪开设有从动夹槽;所述从动夹持板延伸有从动连接座,所述从动夹爪安装于从动连接座,所述从动夹持板一侧安装有从动连接块,所述从动连接块连接有从动压块,所述从动压块将第二往复传动部固定于从动连接块;所述从动夹爪的端面开设有从动夹持定位孔,所述从动夹持定位孔贯通于从动夹槽,所述从动夹持定位孔安装有从动夹持定位轴。
对上述方案的进一步改进为,所述输出机构包括升降组件、可活动于升降组件的输出输送组件,所述升降组件包括升降连接板、安装于升降连接板的升降驱动模组、安装于升降连接板、且位于升降驱动模组一侧的升降导轨、及安装于升降导轨并与升降驱动模组连接的升降传动架,所述输出输送组件包括固定输送轮组及活动输送轮组,所述固定输送轮组与活动输送轮组之间设有输出调节螺杆。
对上述方案的进一步改进为,所述装料载具包括输送底板、安装于输送底板两侧的载具侧板、安装于输送底板的载具主板、及开设于载具主板的放置槽,所述载具主板位于放置槽两侧设有固定压片。
本发明的有益效果是:
相比传统的PCBA板人工治具,本发明通过输入机构将PCB板输送输入,并进行定位,完成定位后通过取料机器人驱动取料机构将PCB板的端面夹持取料,取料后通过取料机器人的驱动作用下将PCB板放入至装料载具,完成后再通过输出机构将装有PCB板的装料载具输出,方便后续加工,整体自动化程度高,节省人力物力,装料精度高。具体是,设置了机架、安装于机架的输入机构、安装于机架并位于输入机构一侧的取料机器人、安装于取料机器人的驱动端的取料机构、安装于机架的输出机构、及设于输出机构的装料载具,所述取料机器人驱动取料机构在输入机构上取料装入至装料载具,所述输出机构将装料载具输出,整体结构简单,动作简单,装料精度高,稳定性好。
取料机构包括基板、安装于基板的驱动装置、可活动安装于基板并与驱动装置连接的主动夹持元件、可活动安装于基板的从动夹持元件、及将所述主动夹持元件与从动夹持元件联动的同步传动装置;所述主动夹持元件与从动夹持元件之间形成一夹持位,通过夹持位用于将PCB板夹持固定,整体结构可靠,取料精度高。采用了驱动装置配合同步传动装置来驱动主动夹持元件和从动夹持元件对PCB板进行夹持,可针对不同尺寸的PCB板进行夹持固定,在夹持运输过程中稳定可靠,适用范围广,在同步传动装置的配合下实现单驱动往复镜像传动,传动精度高,夹持稳定性好。
另外,同步传动装置包括分别安装于基板两侧的第一传动轮和第二传动轮,所述第一传动轮与第二传动轮之间传动设置有同步带,所述同步带包括第一往复传动部和第二往复传动部,所述第一往复传动部与主动夹持元件连接,所述第二往复传动部与从动夹持元件连接,通过两组的传动轮配合同步带传动,同步带设置两组的往复传动部用于往复镜像传动,在配合驱动装置的作用下实现了镜像夹持动作,夹持稳定性好,结构可靠。
附图说明
图1为本发明自动装PCBA板入治具设备的立体结构示意图;
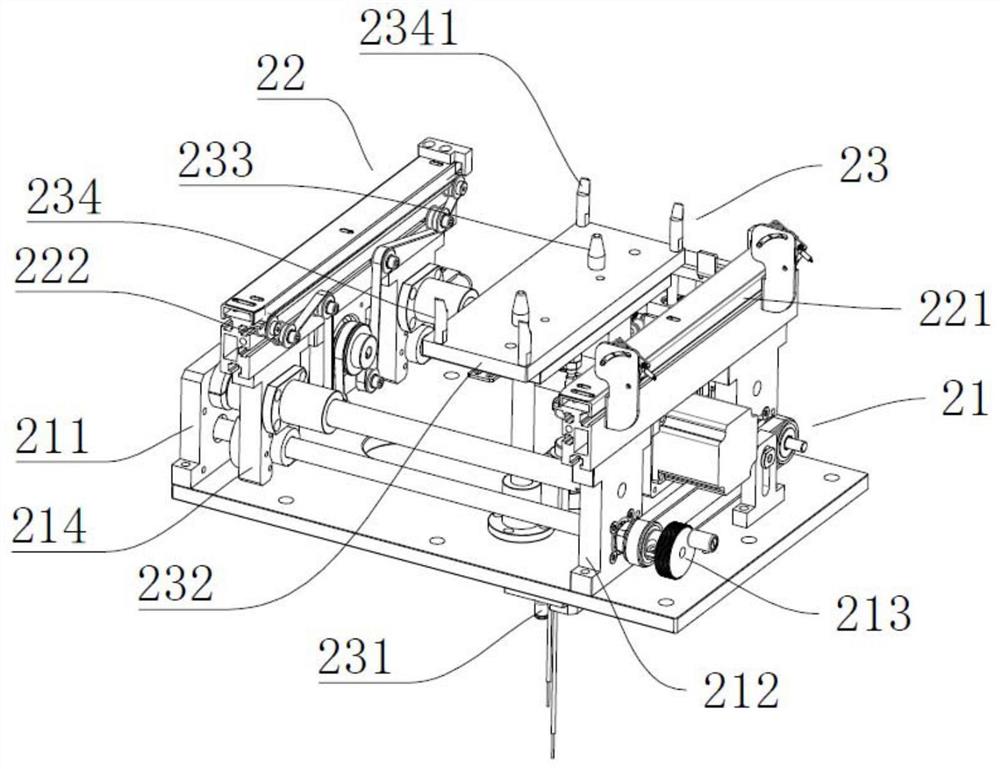
图2为图1中自动装PCBA板入治具设备的输入机构的立体示意图;
图3为图1中自动装PCBA板入治具设备的输入机构另一视角的立体示意图;
图4为图1中自动装PCBA板入治具设备的取料机器人的立体示意图;
图5为本发明自动装PCBA板入治具设备的取料机构的立体示意图;
图6为图1中自动装PCBA板入治具设备的取料机构另一视角的立体示意图;
图7为图1中自动装PCBA板入治具设备的取料机构的爆炸示意图;
图8为图7中自动装PCBA板入治具设备的主动夹爪和从动夹爪的结构示意图;
图9为图1中自动装PCBA板入治具设备的输出机构的立体示意图;
图10为图1中自动装PCBA板入治具设备的装料载具的立体示意图;。
附图标记说明:机架1、输入机构2、输入调节组件21、固定架211、调节架212、调节螺杆213、调节面板214、输入输送组件22、第一输送轮组221、第二输送轮组222、顶起定位组件23、顶升气缸231、顶升板232、定位销233、定位柱234、定位台阶2341、限位气缸235、限位挡板236、取料机器人3、机器人底座31、第一驱动座32、第一摆臂33、第二驱动座34、第二摆臂35、驱动轴36、取料机构4、基板41、连接柱411、连接孔4111、切槽4112、锁紧螺纹孔4113、位置感应器412、位置感应片413、物料感应器414、驱动装置42、驱动底座421、驱动电机422、联轴器4221、传动螺杆423、传动座424、主动夹持元件43、主动滑轨431、主动夹持板432、主动连接座4321、主动连接块 4322、主动压块4323、主动夹爪433、主动夹槽4331、主动夹持定位孔4332、主动夹持定位轴4333、从动夹持元件44、从动滑轨441、从动夹持板442、从动连接座4421、从动连接块4422、从动压块4423、从动夹爪443、从动夹槽4431、从动夹持定位孔4432、从动夹持定位轴4433、同步传动装置45、第一传动轮 451、第二传动轮452、同步带453、第一往复传动部4531、第二往复传动部4532、输出机构5、升降组件51、升降连接板511、升降驱动模组512、升降导轨513、升降传动架514、输出输送组件52、固定输送轮组521、活动输送轮组522、输出调节螺杆523、装料载具6、输送底板61、载具侧板62、载具主板63、放置槽64、固定压片641。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
如图1~图10所示,一种自动装PCBA板入治具设备,包括机架1、安装于机架1的输入机构2、安装于机架1并位于输入机构2一侧的取料机器人3、安装于取料机器人3的驱动端的取料机构4、安装于机架1的输出机构5、及设于输出机构5的装料载具6,所述取料机器人3驱动取料机构4在输入机构2上取料装入至装料载具6,所述输出机构5将装料载具6输出。
参阅图2~图3所示,输入机构2包括输入调节组件21、设于输入调节组件 21的输入输送组件22、及设于输入输送组件22下方的顶起定位组件23,所述输入调节组件21包括固定架211、调节架212、及设于调节架212并与固定架 211连接的调节螺杆213,所述调节螺杆213设有调节面板214,输入调节组件 21可用于调节适应不同大小的PCB板使用,而输入输送组件22将PCB板输送至顶起定位组件23进行定位,以便取料机构4抓取,保证结构精度。
输入输送组件22包括第一输送轮组221和第二输送轮组222,所述第一输送轮组221设于调节架212,所述第二输送轮组222设于调节面板214、且与第一输送轮组221相对设置;通过相对设置的第一输送轮组221和第二输送轮组 222配合用于将PCB板进行输送,输送稳定性好。
顶起定位组件23包括顶升气缸231、安装于顶升气缸231的顶升板232、设于顶升板232的定位销233及设于顶升板232外沿的定位柱234、所述定位柱 234开设有定位台阶2341,所述定位台阶2341开设有导向斜面;通过顶升气缸 231驱动顶升板232用于将PCB板进行顶起,而定位柱234上的定位台阶2341 和导向斜面将PCB板导向到指定位置,进一步保证取料精度。
顶起定位组件23还包括限位气缸235,所述限位气缸235连接有限位挡板236,限位挡板236配合限位气缸235用于将输送过程中的PCB板进行限位固定,定位效果好,取料精度高。
参阅图4所示,取料机器人3包括机器人底座31、安装于机器人底座31的第一驱动座32、连接于第一驱动座32的第一摆臂33、连接于第一摆臂33的第二驱动座34、连接于第二驱动座34的第二摆臂35、及设于第二摆臂35的驱动轴36,所述驱动轴36与取料机构连接,采用多轴结构的机器人驱动,灵活性大,取料精度高,稳定性好。
参阅图5~图8所示,取料机构4包括基板41、安装于基板41的驱动装置 42、可活动安装于基板41并与驱动装置42连接的主动夹持元件43、可活动安装于基板41的从动夹持元件44、及将所述主动夹持元件43与从动夹持元件44 联动的同步传动装置45;所述主动夹持元件43与从动夹持元件44之间形成一夹持位,通过夹持位用于将PCB板夹持固定,整体结构可靠,取料精度高。采用了驱动装置42配合同步传动装置45来驱动主动夹持元件43和从动夹持元件 44对PCB板进行夹持,可针对不同尺寸的PCB板进行夹持固定,在夹持运输过程中稳定可靠,适用范围广,在同步传动装置45的配合下实现单驱动往复镜像传动,传动精度高,夹持稳定性好。
基板41安装有连接柱411,所述连接柱411开设有连接孔4111,所述连接柱411开设有切槽4112,所述切槽4112连通至连接孔4111,所述连接柱411一侧开设有锁紧螺纹孔4113,所述锁紧螺纹孔4113贯通与切槽4112,具体是,通过连接孔4111用于连接驱动部件,如机械手,设置切槽4112配合锁紧螺纹孔 4113用于锁紧连接,进而保证结构的稳定性,装配方便,结构可靠。
基板41一侧安装有位置感应器412,所述位置感应器412对应设有位置感应片413,所述位置感应片413安装于主动夹持元件43、和/或安装于从动夹持元件44,通过位置感应器412和位置感应片413的配合下,用于感应夹持位置,方便实现智能控制。
基板41安装有物料感应器414,所述物料感应器414朝向于夹持位,物料感应器414用于感应所夹持的PCB板,方便实现智能控制。
驱动装置42包括安装于基板41的驱动底座421、安装于驱动底座421的驱动电机422、安装于驱动底座421并与驱动电机422连接的传动螺杆423、及连接于传动螺杆423并可跟随传动螺杆423传动的传动座424,所述传动座424与主动夹持元件43连接,通过驱动电机422用于驱动传动螺杆423,传动螺杆423 带动传动座424使得主动夹持元件43直线传动,在相应作用下,带动同步传动装置45和从动夹持元件44实现镜像传动。
驱动电机422为伺服电机,所述驱动电机422的驱动端设有联轴器4221,所述联轴器4221与传动螺杆423连接,采用伺服电机,方便实现智能控制,而联轴器4221配合传动螺杆423进行传动,连接传动稳定性好。
主动夹持元件43包括与基板41连接的主动滑轨431、可滑动安装于主动滑轨431的主动夹持板432、安装于主动夹持板432的主动夹爪433,所述主动夹爪433开设有主动夹槽4331,所述主动夹持板432与驱动装置42连接,通过主动滑轨431的作用,可方便主动夹持板432直线传动,而主动夹爪433上的主动夹槽4331用于将PCB板夹持固定,夹持稳定性好。
主动夹持板432延伸有主动连接座4321,所述主动夹爪433安装于主动连接座4321,所述主动夹持板432一侧安装有主动连接块4322,所述主动连接块 4322连接有主动压块4323,所述主动压块4323将第一往复传动部531固定于主动连接块4322,通过主动连接座4321用于主动夹爪433的安装和固定,而主动连接块4322配合主动压块4323将连接于同步带53的第一往复传动部531,从而能够带动同步带53传动。
主动夹爪433的端面开设有主动夹持定位孔4332,所述主动夹持定位孔 4332贯通于主动夹槽4331,所述主动夹持定位孔4332安装有主动夹持定位轴 4333,通过主动夹持定位孔4332上的主动夹持定位轴4333用于夹持时定位,同时也可保证夹持的稳定性,取料精度高。
从动夹持元件44包括与基板41连接的从动滑轨441、可滑动安装于从动滑轨441的从动夹持板442、安装于从动夹持板442的从动夹爪443,所述从动夹爪443开设有从动夹槽4431;通过从动滑轨441的作用,可方便从动夹持板442 直线传动,而从动夹爪443上的从动夹槽4431用于配合主动夹槽4331将PCB 板夹持固定,夹持稳定性好。
从动夹持板442延伸有从动连接座4421,所述从动夹爪443安装于从动连接座4421,所述从动夹持板442一侧安装有从动连接块4422,所述从动连接块 4422连接有从动压块4423,所述从动压块4423将第二往复传动部532固定于从动连接块4422;通过从动连接座4421用于从动夹爪443的安装和固定,而从动连接块4422配合从动压块4423将连接于同步带53的第二往复传动部532,从而能够跟随同步带53传动。
从动夹爪443的端面开设有从动夹持定位孔4432,所述从动夹持定位孔 4432贯通于从动夹槽4431,所述从动夹持定位孔4432安装有从动夹持定位轴 4433,通过从动夹持定位孔4432上的从动夹持定位轴4433用于夹持时定位,同时也可保证夹持的稳定性,取料精度高。
同步传动装置45包括分别安装于基板41两侧的第一传动轮451和第二传动轮452,所述第一传动轮451与第二传动轮452之间传动设置有同步带453,所述同步带453包括第一往复传动部4531和第二往复传动部4532,所述第一往复传动部4531与主动夹持元件43连接,所述第二往复传动部4532与从动夹持元件44连接,通过两组的传动轮配合同步带453传动,同步带453设置两组的往复传动部用于往复镜像传动,在配合驱动装置42的作用下实现了镜像夹持动作,夹持稳定性好,结构可靠。
参阅图9所示,输出机构5包括升降组件51、可活动于升降组件51的输出输送组件52,所述升降组件51包括升降连接板511、安装于升降连接板511的升降驱动模组512、安装于升降连接板511、且位于升降驱动模组512一侧的升降导轨513、及安装于升降导轨513并与升降驱动模组512连接的升降传动架 514,所述输出输送组件52包括固定输送轮组521及活动输送轮组522,所述固定输送轮组521与活动输送轮组522之间设有输出调节螺杆523,通过升降组件 51驱动输出输送组件52升降传动,方便在放入PCB板后带动装料载具6输送,升降过程是通过升降驱动模组512带动升降传动架514沿升降导轨513传动,传动稳定性好,精度高,而固定输送轮组521和活动输送轮组522配合用于将装料载具6输送,方便放料和输送到下一工位加工。
参阅图10所示,装料载具6包括输送底板61、安装于输送底板61两侧的载具侧板62、安装于输送底板61的载具主板63、及开设于载具主板63的放置槽64,所述载具主板63位于放置槽64两侧设有固定压片641,通过放置槽64 用于将PCB板放入固定,配合固定压片641将PCB板固定,方便后续加工。
本发明通过输入机构2将PCB板输送输入,并进行定位,完成定位后通过取料机器人3驱动取料机构4将PCB板的端面夹持取料,取料后通过取料机器人3的驱动作用下将PCB板放入至装料载具6,完成后再通过输出机构5将装有PCB板的装料载具6输出,方便后续加工,整体自动化程度高,节省人力物力,装料精度高。具体是,设置了机架1、安装于机架1的输入机构2、安装于机架1并位于输入机构2一侧的取料机器人3、安装于取料机器人3的驱动端的取料机构4、安装于机架1的输出机构5、及设于输出机构5的装料载具6,所述取料机器人3驱动取料机构4在输入机构2上取料装入至装料载具6,所述输出机构5将装料载具6输出,整体结构简单,动作简单,装料精度高,稳定性好。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种自动装PCBA板入治具设备
- 一种SMT贴片线全自动治具内自动装夹PCBA板的回流线体