宠物用智能饮水机及工作方法、存储设备
文献发布时间:2023-06-19 12:29:04
技术领域
本发明涉及宠物用产品技术领域,特别涉及一种宠物用智能饮水机的工作方法、存储设备及宠物用智能饮水机。
背景技术
随着人民生活水平的不断提高,越来越多的家庭开始养宠物,尤其是养猫科或犬科动物。在宠物主家庭中宠物已经成为家中的一员了,宠物的身体健康也成为宠物主极为关心的部分。因此,在饲养宠物的过程中,宠物饮食卫生方面的问题也越来越得到人们的关注。宠物的身体里大部分是水,若饮用不健康的水,很容易造成宠物处于不健康的状态,从而引发各种疾病,因此市场上出了宠物用饮水机。
在实现本发明技术方案的过程中,发明人发现:一旦宠物主需要有一段时间外出,宠物便只能寄养在别人家,非常的麻烦且不方便。若要放在自己家里,食物可以提供很多,但饮用水却很难提供。饮用水提供太多,可能宠物会很快把干净的水全部弄脏或将水洒出,提供太少又可能会造成宠物饮水不足的问题。
发明内容
根据现有技术中所存在的不足,本发明所解决的技术问题是提供一种能根据水碗中水位情况提供饮用水的宠物用智能饮水机的工作方法、存储设备及宠物用智能饮水机。
为解决上述技术问题,本发明所采用的技术方案是:一种宠物用智能饮水机的工作方法,包括以下步骤:a、获取水碗内饮用水的水位信息;b、若所述水碗中饮用水的水位到达或低于设定低水位,则控制净水箱中的净水流入所述水碗;若水位达到或高于设定高水位,则停止往所述水碗中流入净水。
进一步地,本技术方案还包括提示所述净水箱缺水的步骤,获取所述净水箱中净水的水位信息,若所述净水箱中净水的水位达到或低于第一设定值,则作出所述净水箱缺水的提示。
进一步地,本技术方案还包括清废水的步骤,获取所述水碗中饮用水的停留时间,若停留时间达到或大于第一设定时间,则执行排出所述水碗中饮用水的动作或执行清洗所述水碗的步骤或向用户发出提示。
进一步地,本技术方案还包括清废水的步骤,获取当前距离上一次清洗所述水碗的时间间隔,若所述时间间隔达到或大于第二设定时间,则执行排出所述水碗中水的动作或执行清洗所述水碗的步骤或向用户发出提示。
进一步地,本技术方案还包括清洗所述水碗的步骤,具体包括,A、获取是否清洗所述水碗的信号;B、若获取到则排出所述水碗中的水;C、所述水碗中的水排干净后,将所述净水箱中的水定量加入所述水碗以清洗所述水碗;D、再次排出所述水碗中的清洗所述水碗的水。
进一步地,本技术方案还包括提示废水箱中水满的步骤,获取所述废水箱中废水的水位信息,若所述废水箱中废水的水位达到或大于第二设定值,则作出所述废水箱内水满的提示。
进一步地,本技术方案还包括停止水流入所述废水箱的步骤,在所述废水箱中废水的水位达到或大于所述第二设定值时,执行停止所述水碗中水流入的动作。
进一步地,本技术方案还包括对所述水碗中的饮用水进行杀菌的步骤,获取对所述水碗中水进行杀菌的信号,若获取到则启动对所述水碗中的水进行杀菌的动作。
进一步地,本技术方案还包括对所述水碗中的饮用水进行杀菌的步骤,获取宠物靠近所述水碗的信号,若宠物靠近则停止对所述水碗中的水进行杀菌,否则持续对所述水碗中的水进行杀菌。
进一步地,本技术方案还包括对所述水碗中的水进行杀菌的步骤,获取宠物靠近所述饮水机的信号,若宠物靠近则停止对所述水碗中的水进行杀菌,否则持续对所述水碗中的水进行杀菌。
进一步地,本技术方案还包括记录宠物活动信息的步骤,获取宠物靠近所述饮水机的信号,若靠近则记录宠物在所述饮水机旁停留的时间。
进一步地,本技术方案还包括记录宠物饮水信息的步骤,获取宠物靠近所述水碗的信号,若宠物靠近又离开则获取所述水碗的重量变化信息。
进一步地,本技术方案还包括记录宠物饮水信息的步骤,获取宠物靠近所述饮水机的信号,若宠物靠近又离开则获取所述水碗的重量变化信息。
进一步地,本技术方案中获取所述水碗的重量变化信息的步骤包括,宠物靠近时先记录所述水碗的重量信息,宠物离开后再次记录所述水碗的重量信息,将宠物靠近时和离开后获得的重量信息相比较得到重量变化信息。
进一步地,本技术方案中获取所述水碗的重量变化信息的步骤包括,宠物离开后停止所述水碗中水的涌动,等待第三设定时间后再检测所述水碗的重量信息,将此次的重量信息减去上次的重量信息得到重量变化信息。
进一步地,本技术方案还包括记录宠物饮水信息的步骤,根据程序设定检测所述水碗的重量信息,以统计所述水碗一天的重量变化,得到宠物一天的饮水信息。
本技术方案还公开一种存储设备,其中存储有多条指令代码,所述指令代码适于由处理器加载执行为上技术技方案中任一项所述的工作方法。
本技术方案还公开一种宠物用智能饮水机,包括主机、净水箱、水碗、净水出口、控制电路和净水水路,所述净水箱通过所述净水水路连通所述净水出口,所述控制电路能控制所述净水入口流出净水至所述水碗,所述水碗用于装给宠物饮用的水,所述控制电路包括第一获取单元,用于获取所述水碗内饮用水的水位信息;第一判断单元,用于判断所述水碗中水的水位与设定低水位和设定高水位之间的关系;第一控制单元,用于在水位到达或低于所述设定低水位时控制所述净水箱中的水流入所述水碗,在水位达到或高于所述设定高水位时停止往所述水碗中流入净水。
进一步地,本技术方案还包括第一提示单元,所述第一提示单元能在所述净水箱中净水的水位达到或低于第一设定值时发出提示。
进一步地,本技术方案还包括废水箱、抽废水口和废水水路,所述废水箱通过所述废水水路连通所述抽废水口;所述控制电路还包括第二获取单元,用于获取所述水碗中饮用水的停留时间;第二判断单元,用于判断所述停留时间是否达到或大于第一设定时间;第二控制单元,用于在达到或大于时控制所述水碗中的水排出至所述废水箱,或者用于在达到或大于时执行清洗所述水碗的动作。
进一步地,本技术方案还包括废水箱、抽废水口和废水水路,所述废水箱通过所述废水水路连通所述抽废水口;所述控制电路还包括第二获取单元,用于获取所述水碗中饮用水的停留时间;第二判断单元,用于判断所述停留时间是否达到或大于第一设定时间;第二提示单元,用于在所述停留时间达到或大于时发出提示。
进一步地,本技术方案还包括废水箱、抽废水口和废水水路,所述废水箱通过所述废水水路连通所述抽废水口;所述控制电路还包括第二获取单元,用于获取当前距离上一次清洗所述水碗的时间间隔;第二判断单元,用于判断所述时间间隔是否达到或大于第二设定时间;第二控制单元,用于在达到或大于时控制所述水碗中的水排出至所述废水箱,或者用于在达到或大于时执行清洗所述水碗的动作。
进一步地,本技术方案还包括废水箱、抽废水口和废水水路,所述废水箱通过所述废水水路连通所述抽废水口;所述控制电路还包括第二获取单元,用于获取当前距离上一次清洗所述水碗的时间间隔;第二判断单元,用于判断所述时间间隔是否达到或大于第二设定时间;第二提示单元,用于在达到或大于时发出提示。
进一步地,本技术方案中所述控制电路还包括第三获取单元,用于获取是否清洗所述水碗的信号;第三控制单元,用于在收到信号后控制排出所述水碗中的水,待排干净后将所述净水箱中的水定量加入所述水碗以清洗所述水碗,再次排出所述水碗中的清洗所述水碗的水。
进一步地,本技术方案还包括废水箱、抽废水口和废水水路,所述废水箱通过所述废水水路连通所述抽废水口;所述控制电路还包括第四获取单元,用于获取所述废水箱中废水的水位信息;第四判断单元,用于判断所述废水箱中废水的水位是否达到或大于第二设定值;第三提示单元,用于在达到或大于时发出提示。
进一步地,本技术方案还包括废水箱、抽废水口和废水水路,所述废水箱通过所述废水水路连通所述抽废水口;所述控制电路还包括第四获取单元,用于获取所述废水箱中废水的水位信息;第四判断单元,用于判断所述废水箱中废水的水位是否达到或大于第二设定值;止水单元,用于在废水水位达到或大于所述第二设定值时,停止所述水碗中水排出。
进一步地,本技术方案中所述控制电路还包括第五获取单元,用于获取对所述水碗中水进行杀菌的信号;杀菌单元,用于在收到杀菌信号后启动对所述水碗中的水进行杀菌的动作。
进一步地,本技术方案中所述控制电路还包括第六获取单元,用于获取宠物靠近所述水碗或饮水机的信号;杀菌单元,用于在靠近时停止对所述水碗中的水进行杀菌,否则持续对所述水碗中的水进行杀菌。
进一步地,本技术方案中所述控制电路还包括第七获取单元,用于获取宠物靠近所述饮水机的信号;计时单元,用于在靠近时记录宠物在所述饮水机旁停留的时间。
进一步地,本技术方案中所述控制电路还包括第八获取单元,用于获取宠物靠近所述水碗或饮水机的信号;计重单元,用于在宠物离开后获取所述水碗的重量信息;运算单元,用于将此次测得的重量信息与上次测得的重量信息相比较得到重量变化信息。
进一步地,本技术方案中所述控制电路还包括第八获取单元,用于获取宠物靠近所述水碗或饮水机的信号;计重单元,用于在宠物靠近时和离开后分别获取所述水碗的重量信息;运算单元,用于将前后测得的重量信息相比较得到重量变化信息。
进一步地,本技术方案中所述控制电路还包括计重单元,用于根据程序设定检测所述水碗的重量信息;运算单元,用于统计所述水碗一天的重量变化,得到宠物一天的饮水信息。
本发明提供的技术方案带来的有益效果主要是:由于上述技术方案中的宠物用智能饮水机和工作方法都能获取水碗内饮用水的水位信息,并且在所述水碗中水的水位到达或低于设定低水位时,则控制净水箱中的水流入所述水碗,在水位达到或高于设定高水位时,停止往所述水碗中流入净水,所以能根据水碗中饮用水的情况适时增添饮用水,防止水碗中的饮用水被宠物洒出后导致宠物后续无水可饮,更重要的是解决了宠物主长时间外出而带来饲养宠物的麻烦。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单介绍,显而易见,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获取其他的附图。
图1是本发明实施例中饮水机的结构立体图;
图2是本发明实施例中饮水机几大组成部件处于分解状态下的示意图;
图3是本发明实施例中饮水机去除水碗后的结构立体图;
图4是本发明实施例中主机部分去掉后盖的内部结构立体图;
图5是本发明实施例中饮水机的结构剖视图;
图6是本发明实施例中饮水机在滤芯设置位置处的结构剖视图;
图7是前面板与抽水嘴在连接状态下示出抽水嘴内水路的剖视图;
图8是前面板与抽水嘴在连接状态下示出抽水嘴内水位检测装置的剖视图;
图9是图5中抽水嘴位于最低位置状态下去除水碗后的结构局部视图;
图10是本发明实施例中抽水嘴的结构立体图;
图11是抽水嘴位于最低位置状态下抽水嘴触碰测检开关的结构立体图;
图12是图5中抽水嘴位于最低位置状态下的局部视图;
图13是本发明实施例净水水路中分流通道的第一示意图;
图14是本发明实施例中净水水路中分流通道的第二示意图;
图15是本发明实施例控制电路中部分元器件设置在PCB板上的示意图;
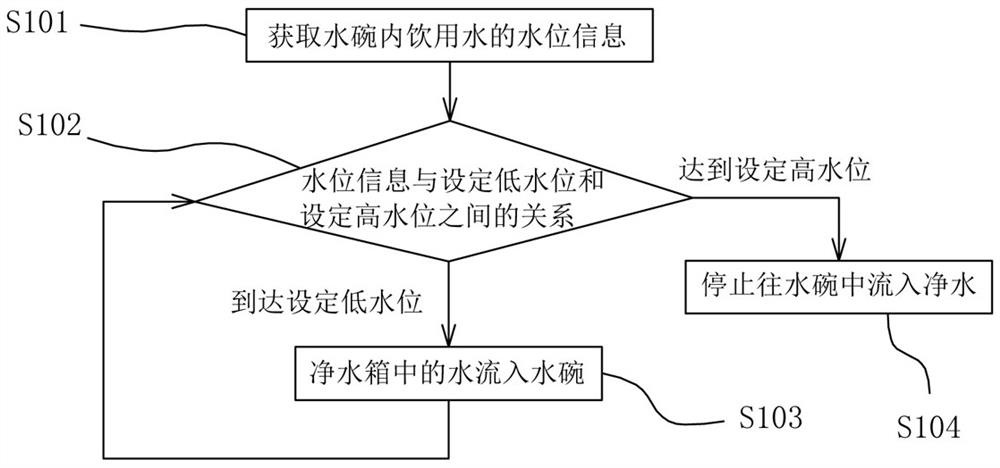
图16是本发明实施例中防水碗缺水的方法流程图;
图17是本发明实施例中提示净水箱缺水的方法流程图;
图18是本发明实施例中第一种排水碗中废水的方法流程图;
图19是本发明实施例中清洗水碗的方法流程图;
图20是本发明实施例中第二种排水碗中废水的方法流程图;
图21是本发明实施例中提示废水箱中水满的方法流程图;
图22是本发明实施例中对水碗中水进行杀菌的第一种方法流程图;
图23是本发明实施例中对水碗中水进行杀菌的第二种方法流程图;
图24是本发明实施例记录宠物饮水信息的方法流程图。
具体实施方式
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合实施例及附图,对本发明进行进一步详细说明。应当理解,此部分所描述的具体实施例仅可用于解释本发明,并不用于限定本发明。
本发明中常用术语“宠物”主要指常见的猫科或犬科动物;术语“上、下”表示的位置关系是指宠物用饮水机在水平放置状态下,在垂直主方向上的位置关系。术语“前和后”表示的位置关系是指宠物用饮水机在水平放置状态下,宠物饮水时靠近宠物的为前,背离宠物的为后。
如图1、图2所示,其为本发明优选实施方案提供的一种宠物用智能饮水机100(以下简“饮水机100”),包括净水箱110、废水箱120、主机130、滤芯140和水碗150。如图3、图4所示,主机130上设有净水出口1301和抽废水口1302,主机130内设置有控制电路131、废水水路132和净水水路133,净水箱110通过净水水路133连通净水出口1301,废水箱120通过废水水路132连通抽废水口1302。净水箱110用于储存干净的水,滤芯140用于过滤净水箱110中的水,水碗150用于储存滤芯140过滤过的水以便宠物饮用,废水箱120用于储存水碗150中脏了的废水。本实施例中,滤芯140选用0.1-0.01微米的超滤滤芯,以更好过滤病毒和细菌。
如图2、图4、图5所示,主机130上还设有杀菌单元170,滤芯140可拆卸设于主机130上,滤芯140连接在净水水路133中,净水箱110流出的水经滤芯140过滤后从净水出口1301流出。净水出口1301设于主机130上,杀菌单元170设于净水出口1301的两端,净水出口1301和杀菌单元170位于水碗150的上方。杀菌单元170选用UVC紫外灯,杀菌单元170电连接控制电路131用于对水碗150中的水进行紫外线杀菌。控制电路131能控制净水入口1301适时流出净水至水碗150,以及控制抽废水口1302适时排出水碗150中的废水至废水箱120。其中,适时是指控制电路131根据接收的电信号判断到有需要的时候。如水碗150中的净水不足则控制净水出口1301流出净水;水碗150中的净水放置时间超过设定时间则控制抽废水口1302抽出水碗150中的废水,废水抽完后再控制净水出口1301流出净水。
如图4、图6所示,净水箱110上设有止水阀111,滤芯140设有与止水阀111相配的凸柱141,凸柱141设有连通滤芯140中过滤系统的入水口1411。止水阀111设于净水箱110的箱体底部,止水阀111选用可伸缩的弹性单向阀。饮水机100在使用状态下(各组件安装到位),凸柱141顶开止水阀111,此时入水口1411连通净水箱110。
如图2、图3、图4、图7所示,主机130还包括第一水泵134、第二水泵135、第一放置平台136、第二放置平台137、前面板138和活动设置在主机130上的抽水嘴160, 第一放置平台136位于主机130的前面,第二放置平台137位于主机130的后面。水碗150放置在第一放置平台136上,废水箱120放置在第二放置平台137上,净水箱110设于废水箱120的上端。本实施例中,第一放置平台136的周边设有防止水碗150滑离第一放置平台136的凸沿1363;废水箱120的底部是通过插接方案连接第二放置平台137(插接方案也可改为现有的卡接方案),第二放置平台137插入废水箱120的底部空间,以使废水箱120稳固放置在第二放置平台137上。第一放置136平台上露出有两电源输出端1362,水碗150上对应设有两电源接入端(图未示),两电源输出端1362电连接控制电路131,水碗150放置在第一放置平台136上后,两电源接入端电连接两电源输出端1362,水碗150获得电能。两电源输出端1362选择为两导电触碰点,两电源接入端选择为两弹性导电顶针。前面板138位于第一放置平台136的上方,前面板138上设有两个红外传感器180,前面板138与第一放置平台136之间留有水碗150的放置空间,红外传感器180电连接控制电路131,当宠物靠近水碗150准备饮水时,红外传感器180即可感应到宠物的存在,以给控制电路131提供信息。具体地,第一水泵134和第二水泵135设于第二放置平台137内,净水箱110层设在废水箱120上并有一部分凸出废水箱120位于主机130上,第一水泵134连接在净水水路133中用于为净水出口1301提供出水的动力;第二水泵135连接在废水水路132中用于为抽废水口1302提供抽水的动力。抽废水口1302设于抽水嘴160上,抽水嘴160内设有连通抽废水口160的水流通道162,水流通道162可视为废水水路132中的一部分,抽水嘴160能进入或离开水碗150。
如图5所示,第一放置平台136还设有计重单元,计重单元为重量传感器1361,重量传感器1361用于测量第一放置平台136上放置物体的重量。如水碗150放置在第一放置平台136上时,可检测水碗150的重量变化。
如图5、图7、图8、图9所示,本实施例中,抽水嘴160位于第一放置平台136的上方,抽水嘴160是滑动连接在主机130中的前面板138上。主机130上设有与抽水嘴160相配的导向结构1383和限位结构1382,导向结构1383和限位结构1382设于前面板138的内表面,导向结构1383用于限定抽水嘴160在主机130上的滑动方向;限位结构1382用于限定抽水嘴160的滑动距离,以实现抽废水口1302能进入或离开水碗150,限位结构1382并使得抽水嘴160在水碗150内最低位置时,抽水嘴160不接触水碗150。在垂直主方向上,抽水嘴160具有上端和下端,其中抽废水口1302位于抽水嘴160下端的底端面上,抽水嘴160的上端设有出水口163,水流通道162连通抽废水口1302和出水口163。水碗150放置在第一放置平台136上后,设置抽废水口1302的下端能进、出水碗150。第二水泵135通过废水水路132中的软管连通出水口161和废水箱120,第二水泵135能提供动力,使水流通道162内产生负压,水碗150内的废水从抽废水口1302吸至废水箱120。
如图7、图8、图9所示,前面板138上设有呈长条形结构的开口1381,抽水嘴160上固定有便于用户操作的操作块164,抽水嘴160设于前面板138的内表面,操作块164穿过开口1381后露于前面板138的外表面,操作块164能在开口1381限定的空间内带着抽水嘴160上下移动。
如图8、图9所示,导向结构1383包括上扣位13832和下扣位13831,上扣位13832位于开口1381的上方,下扣位13831位于开口1381的下方。抽水嘴160设于上扣位13832和下扣位13831内,通过操作块164能使抽水嘴160沿着在上扣位13832和下扣位13831滑动,以实现抽废水口1302能进、出水碗150。限位结构1382包括凸点165和凹点13821、13822,凸点165设于抽水嘴160的外表面,凹点13821和凹点13822在垂直方向上分开设于前面板138上,凹点13821和凹点13822的间距限定出抽水嘴160的滑动行程。抽水嘴160移动至最低位置时,凸点165和凹点13822配合,操作块164位于开口1381的最下方;抽水嘴160移动至最高位置时,凸点165和凹点13821配合,操作块164位于开口1381的最上方。在本实施例中,抽水嘴160处于水碗150中的最低位置时,抽水嘴160不接触水碗150;抽水嘴160移动至最高位置时,抽水嘴160隐藏在前面板138内。同理在其他实施例中,前面板138也可选择凸点进行设置,对应地凹点设于抽水嘴160的外表面。限位结构1382的设置目的有两个,其一是为了限定抽水嘴160的滑动行程,其二是为了让用户感知抽水嘴160是否到达指定位置。
如图9、图10所示,抽水嘴160上还设有弹性臂166、第一水位检测装置167和容置第一水位检测装置167的空间,凸点165设于弹性臂166上,第一水位检测装置167用于检测水碗150中盛装水的水位。第一水位检测装置167为电容感应式检测装置,第一水位检测装置167被包附在抽水嘴160内;抽水嘴160进入水碗150后,第一水位检测装置167能检测水碗150中液体的液位信息。具体地,第一水位检测装置167包括PCB板,PCB板上设有电容感应层(图未示),PCB板和电容感应层被包附在抽水嘴160内。
如图5、图6所示,主机130上还设有第二水位检测装置112和第三水位检测装置121,第二水位检测装置112用于检测净水箱110中盛装水的水位,第三水位检测装置121用于检测废水箱120中盛装水的水位。第二水位检测装置112和第三水位检测装置121都为电容感应式检测装置,第三水位检测装置121近距离靠近(如抵接)废水箱120;第二水位检测装置112立于主机130的上端,净水箱110上设有容置第二水位检测装置112的容置腔113,第二水位检测装置112可插入容置腔113内以检测净水箱110中液体的液位。第二水位检测装置112和第三水位检测装置121采用电容感应式检测装置且设于主机130上的目的是,可以让废水箱120和净水箱110不带电且外观变得更简洁,第二水位检测装置112和第三水位检测装置121也不用长时间浸泡在水中。
如图11所示,主机130还包括测检开关139,测检开关139设于前面板138的内表面。抽水嘴160滑动至行程最低位置时,凸点165和凹点13822配合,抽水嘴160触动测检开关139,测检开关139给出抽水嘴160位于最低位置的信号。测检开关139用于判断抽废水口1302是否在水碗150内的最低位置。
在其他实施例中,根据检测开关的选用型号和设置位置的不同,检测开关还可以用于检测净水箱110是否组装到位或者/和用于检测水碗150是否组装到位或者/和用于检测废水箱120是否组装到位,以判断饮水机100是否可以工作。
如图5、图12所示,水碗150中盛水空间151的底面152设有凹陷部153,凹陷部153的形状尺寸略大于与抽水嘴160中设抽废水口1302的下端外形尺寸,以便盛水空间151内的水进入抽废水口1302。抽废水口1302在水碗150内的最低位置时,抽废水口1302位于凹陷部153内,此时抽废水口1302低于底面152。本实施例中,水碗150中盛水空间的底面152设为5度的斜面,该斜面朝向凹陷部153所在的位置向下倾斜。
为进一步展现净水水路133在本实施例中的具体实现方案,如图4、图6、图12、图13、图14所示,净水出口1301设置为两个,净水出口1301的两边都设有杀菌单元170,净水水路133包括分流通道1385,设置分流通道1385的外部结构设于主机130上,净水出口1301设于分流通道1385的末端,净水箱110中的水流至滤芯140后经第一水泵134再到软管、分流通道1385后从净水出口1301流出。如图4、图5、图7所示,废水水路132为从抽废水口1302依次经水流通道162、第二水泵135、单向阀124后进入废水箱120。本实施例中,净水水路133和废水水路132中各部件之间的连接都是采用常用的软管连通。
由于上述实施例中净水箱110、废水箱120、净水水路133、废水水路132、净水出口1301和抽废水口1302的设置,且控制电路131能控制净水入口1301流出净水至水碗150,以及控制电路131能控制抽废水口1302排出水碗150中的废水至废水箱120,所以本技术方案中的饮水机100提供了宠物饮用水的健康循环,方便了水碗150中废水的排出,同时防止水碗150中的水长时间存在而滋生细菌,更重要的是解决了宠物主长时间外出而带来饲养宠物的麻烦。
另外,由于第二水泵135和抽水嘴160、的设置,抽水嘴160设于第一放置平台136的上方并可相对主机130滑动,以实现水碗150放置在第一放置平台136上后,抽废水口1302的设置端能进、出水碗150,所以便于饮水机100排废水的操作。排废水时,用户只需直接移动抽水嘴160,使抽废水口1302进入水碗150,触动测检开关139以提供相关信号,用户再启动抽出水碗150中废水的开关,即可实现抽废水动作。
如图15所示,控制电路131包括处理器1311、存储器1312、计时器1313和蜂鸣器1314,其中存储器1312内存储有多条指令代码(包括程序代码和参数代码),处理器1311适于加载存储器1312中存储的指令代码实现以下功能单元要完成的动作:第一获取单元,用于获取水碗150内饮用水的水位信息;第一判断单元,用于判断水碗150中饮用水的水位与设定低水位和设定高水位之间的关系;第一控制单元,用于在水碗150中饮用水的水位到达(或低于)设定低水位时,控制第一水泵134通电工作,此时净水箱110中的净水通过净水水路133流入水碗150,当水位达到(或高于)设定高水位时,给第一水泵134断电,停止往水碗150中加入净水;第一提示单元,用于在净水箱110中净水的水位达到(或低于)第一设定值时控制蜂鸣器1314工作,向用户发出提示。
本实施例中,处理器1311适于加载存储器1312中存储的指令代码实现以下功能单元要完成的动作,以防水碗150中的水因长时间露在空气中存在而滋生细菌:第二获取单元,用于获取水碗150中饮用水的停留时间;第二判断单元,用于判断停留时间是否达到(或大于)第一设定时间(优选2天或3天);第二控制单元,用于在停留时间达到(或大于)第一设定时间时控制水碗150中的水通过废水水路132排出至废水箱120。在其他实施例中,在停留时间达到(或大于)第一设定时间时,第二控制单元要完成的动作还可更改为执行清洗水碗150的动作;或者将第二控制单元更改为第二提示单元,用于在停留时间达到(或大于)第一设定时间时控制蜂鸣器1314工作,向用户发出提示。清洗水碗150的动作包括以下功能单元:第三获取单元,用于获取是否清洗水碗150的信号;第三控制单元,用于在收到信号后控制第二水泵135工作,排出水碗150中的水,待排干净后将净水箱110中的水定量加入水碗150以清洗水碗150,再次排出水碗150中的用于清洗水碗150的水。
在其他实施例中,第二获取单元还可用于获取当前距上一次清洗水碗150的时间间隔;第二判断单元还可用于判断该时间间隔是否达到(或大于)第二设定时间(优选3天或5天或7天);第二控制单元还可用于在达到(或大于)时控制第二水泵135工作,水碗150中的水排出至废水箱120;或者用于在达到(或大于)时执行清洗水碗150的动作;第二提示单元还可用于在时间间隔达到(或大于)第二设定时间时控制蜂鸣器1314工作,向用户发出提示。
本实施例中,处理器1311适于加载存储器1312中存储的指令代码实现以下功能单元要完成的动作,以监控废水箱120中的水位状态:第四获取单元,用于获取废水箱120中废水的水位信息;第四判断单元,用于判断废水箱120中废水的水位是否达到(或大于)第二设定值;第三提示单元,用于在达到(或大于)时控制蜂鸣器1314工作,向用户发出提示;止水单元,用于在废水水位达到(或大于)第二设定值时,给第二水泵135断电,停止水碗150中水的排出。
本实施例中,处理器1311适于加载存储器1312中存储的指令代码实现以下功能单元要完成的动作,以对水碗150中的水进行杀菌:第六获取单元,用于获取宠物靠近水碗150(或饮水机100)的信号;杀菌单元170,在宠物靠近时停止对水碗150中的水进行杀菌,否则持续对水碗150中的水进行杀菌。
在其他实施例中,对水碗150中的水进行杀菌的动作也可以更改为由以下功能单元来完成:第五获取单元,用于获取对水碗150中水进行杀菌的信号;杀菌单元170,在收到杀菌信号后启动对水碗150中的水进行杀菌的动作。此时,杀菌信号的给出可以是用户主动给出,也可以是通过程序设定的时间点自动给出,还可以是通过判断距离上次杀菌的时间得出(若距离时间达到设定时间则给出)。
本实施例中,处理器1311适于加载存储器1312中存储的指令代码实现以下功能单元要完成的动作,以获取宠物对饮水机100的兴趣情况:第七获取单元,用于获取宠物靠近饮水机100的信号;计时单元,用于在靠近时记录宠物在饮水机100旁停留的时间。
本实施例中,处理器1311适于加载存储器1312中存储的指令代码实现以下功能单元要完成的动作,以给获取宠物每次饮用水的情况:第八获取单元,用于获取宠物靠近水碗150(或饮水机100)的信号;重量传感器1361,用于在宠物离开后获取水碗150的重量信息;运算单元,用于将此次测得的重量信息与上次测得的重量信息相比较得到重量变化信息。具体地,将上次的重量信息减去此次测得的重量信息得到重量变化信息。上次测得的重量信息可以是上一次宠物喝水离开水碗150后测得的重量,也可以是水碗150中加水完成后水碗150的重量。在其他实施例中,为更准确获得宠物每次饮用水的信息,第八获取单元在获取宠物靠近水碗150(或饮水机100)的信号后;重量传感器1361还可以用于在宠物靠近时和离开后分别获取水碗150的重量信息;此时运算单元用于将前后测得的重量信息相比较得到重量变化信息。宠物靠近的认定设定为红外传感器180连续2秒检测到宠物的存在信息;宠物离开可设定为红外传感器180连续1分钟检测不到宠物的存在信息。
在其他实施例中,处理器1311适于加载存储器1312中存储的指令代码实现以下功能单元要完成的动作,以给获取宠物每次饮用水的情况:重量传感器1361,用于根据程序设定检测水碗150的重量信息;运算单元,用于统计水碗150一天的重量变化,得到宠物一天的饮水信息。根据程序设定的方案可以是定时检测水碗150的重量信息,同时在水碗150流入净水前(到达设定低水位)检测一次水碗150的重量信息,在水碗150加水完成后(水位达到设定高水位),再次检测水碗150的重量信息,如此减去净水流入量,可得到宠物一天的饮水信息。
如图16、图17、图18、图21、图22、图24所示,其为一种宠物用智能饮水机的工作方法流程示意图。具体地,该方法包括以下步骤:
如图16所示,其为防水碗150内缺水的步骤:
步骤S101,获取第一水位检测装置167的读数,以得到水碗150内饮用水的水位信息。
步骤S102,判断水位信息与设定低水位和设定高水位之间的关系。
步骤S103,若水碗150中饮用水的水位到达(或低于)设定低水位,则控制净水箱110中的水流入水碗150。
步骤S104,若水位达到(或高于)设定高水位,则停止往水碗150中流入净水。
如图17所示,其为提示净水箱110内缺水的提示步骤:
步骤S201,获取第二水位检测装置112的读数,以得到净水箱110中净水的水位信息;步骤S202,判断净水水位与第一设定值之间的关系;步骤S203,若净水箱110中净水的水位达到(或低于)第一设定值,则作出净水箱110缺水的提示。
如图18所示,其为清除水碗150内废水的步骤:
步骤S301,获取水碗150中饮用水的停留时间;步骤S302,判断停留时间与第一设定时间之间的关系,若停留时间达到(或大于)第一设定时间,则执行步骤S303,否则步骤S301;步骤S303,通过测检开关139检测抽废水口1302是否位于水碗内的最低位置,若是则执行步骤S304,否则向用户发出提示;步骤S304,执行排出水碗150中饮用水的动作。
在其他实施例中,步骤S304还可以更改为执行清洗水碗150的步骤。具体地,如图19所示,清洗水碗150的步骤包括以下步骤:步骤S3041,获取是否清洗水碗150的信号;步骤S3042,若获取到则排出水碗150中的水;步骤S3043,待水碗150中的水排干净后,将净水箱110中的水定量加入水碗150以清洗水碗150;步骤S3044,再次排出水碗150中的清洗水碗150的水。另外,步骤S304还可以更改为向用户发出提示。
在其他实施例中,如图20所示,清除水碗150内废水的步骤还可以是:步骤401,获取当前距离上一次清洗水碗150的时间间隔;步骤S402,判断时间间隔与第二设定时间之间的关系,若时间间隔达到(或大于)第二设定时间,则执行步骤S403;步骤S403,通过测检开关139检测抽废水口1302是否位于水碗内的最低位置,若是则执行步骤S404;步骤S404,排出水碗150中的水。另外,步骤S404还可以更改为执行清洗水碗150的步骤或向用户发出提示。清洗水碗150的步骤具体可参见前段中的描述。
如图21所示,其为提示废水箱120中水满的步骤:
步骤S501,获取第三水位检测装置121的读数以得到废水箱120中废水的水位信息;步骤S502,若废水箱120中废水的水位达到(或大于)第二设定值,则执行步骤S503和步骤S504;步骤S503,作出废水箱120内水满的提示;步骤S504,停止将水碗150中水流入废水箱120。
如图22所示,其为对水碗150中的水进行杀菌的步骤:
步骤S601,杀菌单元170工作对水碗150中的水进行杀菌(杀菌为紫外线杀菌);由于水碗150中的水通常情况下是涌动状态,因此水碗150中的水是流动的,水被反复杀菌;
步骤S602,通过两个红外传感器180获取宠物靠近水碗150的信号,若宠物靠近则执行步骤S603,若未靠近(包括离开)则执行步骤S604;在其他实施例中,当红外传感器180可检测饮水机100周围的红外线变化时,步骤S602可变更为获取宠物靠近饮水机100的信号,若宠物靠近则执行步骤S603,未靠近(包括离开)则执行步骤S604;
步骤S603,停止对水碗150中的水进行杀菌,同时计时器1313记录宠物在水碗150(或饮水机100)旁停留的时间;
步骤S604,持续对水碗150中的水进行杀菌。
在其他实施例中,当杀菌单元170设置为分时段对水碗150中的水进行杀菌时,如图23所示,对水碗150中的水进行杀菌的步骤可以更改为:步骤S701,获取对水碗150中水进行杀菌的信号。该信号的给出可以是用户主动给出,也可以是程序设定的时间点自动给出,还可以是通过判断距离上次杀菌的时间得出(若相距时间达到设定时间则给出)。步骤S702,若获取到杀菌信号则获取宠物靠近水碗150的信号;若宠物靠近则等宠物离开再执行步骤S703,若未靠近则执行步骤S703。步骤S703,杀菌单元170工作启动对水碗150中的水进行杀菌的动作;步骤S704,若杀菌程序完成(如时间达到),则杀菌单元170停止工作,对水碗150中的水进行杀菌的过程结束。
如图24所示,其为记录宠物饮水信息的步骤:
步骤S801,通过两个红外传感器180获取宠物靠近水碗150的信号;步骤S802,若宠物靠近则获取宠物离开的信号;步骤S803,若宠物靠近水碗150后又离开则重量传感器1361获取水碗150的重量变化信息,并记录重量变化信息。在其他实施例中,当红外传感器180可检测饮水机100周围的红外线变化时,步骤S801可更改为获取宠物靠近饮水机100的信号,步骤S803可更改为若宠物靠近饮水机100又离开则重量传感器1361获取水碗150的重量变化信息,并记录重量变化信息。
在本实施例中,水碗150的重量变化信息其实就是宠物的饮水信息,得到水碗150的重量变化信息的方法包括:宠物离开后停止水碗150中水的涌动,等待第三设定时间(目的是等待水碗150中的水静止,优选30秒至1分钟)后再检测水碗150的重量信息,将上次的重量信息减去此次测得的重量信息得到重量变化信息。上次测得的重量信息可以是上一次宠物喝完水离开水碗150后测得的重量信息,也可以是水碗150在加水完成后测得水碗150的重量信息。
在其他实施例中,得到水碗150的重量变化信息的方法可更改为以下步骤:宠物靠近时先记录一次水碗150的重量信息,宠物离开后再记录一次水碗150的重量信息,将宠物靠近前和离开后获得的重量信息相比较得到水碗150的重量变化信息。在该实施步骤中,水碗150中的水可以一直涌动状态,也可以在测重时都停止涌动,待测完重量后再开始涌动。
在其他实施例中,记录宠物饮水信息的方案还可以是:根据程序设定定时检测水碗150的重量信息,以统计水碗150一天的重量变化,得到宠物一天的饮水信息。在该实施步骤中,在水碗150加水完成后也将检测一次水碗150的重量。
由于宠物用智能饮水机的工作方法能获取水碗150内饮用水的水位信息,并且在水碗150中水的水位到达(或低于)设定低水位时,控制净水箱110中的水流入水碗150,在水位达到(或高于)设定高水位时,停止往水碗150中流入净水,所以能根据水碗150中饮用水的情况适时增添饮用水,防水碗150中的饮用水被宠物洒出后导致宠物后续无水可饮,更重要的是解决了宠物主长时间外出而带来饲养宠物的麻烦。
通过以上各实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如ROM/RAM、磁碟、光盘等。另外,程序指令代码可以只存储在一个存储介质中,也可以分开存储在几个存储介质中,以使若干指令用一台设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分所述的方法。
以上应用具体个例对本发明的原理及实施方式进行了阐述,应该理解,以上实施方式只是用于帮助理解本发明,而不应理解为对本发明的限制。对于本领域的一般技术人员,依据本发明的思想,对本发明的结构形式或构造所做出的任何微小改进或等效替代,均应包含在其保护范围之内。
- 宠物用智能饮水机及工作方法、存储设备
- 宠物饮水机过滤构件及宠物饮水机