用于手指运动导轨的长度调节装置、长度可调节的手指运动导轨、包括至少一种该类型的长度可调节的手指运动导轨的治疗装置、以及用于长度调节的方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及一种用于治疗装置的手指运动导轨的长度调节装置,其用于执行手的手指和/或拇指的连续、被动和/或主动辅助运动;一种用于执行该运动的手指运动导轨,其包括该类型的长度调节装置;以及一种治疗装置,其用于执行手的至少一个手指和/或拇指的连续、被动和/或主动辅助运动,包括至少一个这样的手指运动导轨。
此外,本发明还涉及一种用于调节治疗装置上手指运动导轨的长度的方法,该治疗装置用于执行手的至少一个手指和/或拇指的连续、被动和/或主动辅助运动。
背景技术
具有手指运动导轨的治疗装置,用于手的单个和/或多个手指的自动移动,允许控制关节活动,而不管理疗人员是否可用。通过独立于一天中的时间并针对相应用户单独定制的自动化培训,此类装置以成本效益高的方式提高治疗的成功率并缩短用户的恢复时间。
迄今为止,人们已经知道了许多此类治疗和训练装置,它们彼此不同,特别是在力自动作用于手指的手指关节的方式上不同。JP 2011 115 248A和US 2014/028 86 64A1公开了用于支撑手指运动的装置,其运动机构沿着各自的手指横向布置,从而避免了因停留在手指上而导致的运动限制。JP 2011 115 248A公开了一种用于支撑运动的装置,尤其是手指运动导轨,其旨在能够以自然弯曲姿势放置三关节区域。相比之下,US 2014/0288664A1公开了一种手指运动支撑装置,该装置使用传感器技术来确定用户关于所需手指运动(“弯曲或伸展”)的意图,然后借助布置在每个指骨上的压电驱动器来支撑该运动。
然而,由于其设计原理,这两种装置只能不充分地适应不同患者手指或拇指的不同结构形状,因此,它们执行的手指自动运动可能在相对较大的程度上偏离自然运动。
在这方面,CN 105 726 263A公开了一种用于手部康复的便携式外骨骼训练机器人。该训练机器人包括用于手部的固定装置,该装置可固定在手背和手腕上,以及包括用于手指和用于拇指的康复装置。康复装置均由直线电机驱动。为了使训练机器人适应相应用户的结构条件,CN 105 726 263A提出了螺纹杆,该螺纹杆允许每个康复装置至少进行一次手动长度调节。
为了改善这一点,DE 11 2017 000 012B4公开了一种用于对患者的手的手指和拇指进行连续、被动和/或主动辅助运动的治疗装置,该治疗装置允许每个选定的手指配备其自身的具有运动的运动学的手指运动导轨,该手指运动导轨布置在待治疗手指的一侧,允许后者进行不受阻碍的弯曲和/或伸展运动。已知的手指运动轨迹基于托架/导轨运动运动学,该托架/导轨运动运动学允许自动手指运动,该自动手指运动非常接近结构上自然的手指运动。或者,DE 10 2019 112 049.7描述了一种手指运动导轨或一种治疗装置,其运动运动学包括一个多关节铰链,作为弯曲掌指关节的装置,因此对于手指运动导轨上的轴向力和扭转力的作用特别坚固。特此明确提及上述两种公开的移动原则。
对于所有此类治疗装置,在训练开始之前,装置,尤其是单个手指运动导轨,必须适应相应的解剖结构,即手的尺寸和/或单个手指的尺寸。为此,在大多数情况下,将单个手指运动导轨手动固定到处于适合相应用户的最佳位置的相应治疗装置的上壳或支架上,然后必须在培训课程结束后手动释放手指运动导轨,并为下一个用户手动重新连接到另一个位置。该程序耗时,并且在日常临床实践中,其缺点是缩短了使用治疗装置的各个用户可用的训练时间。
发明内容
因此,本发明的目的是提供一种装置和方法,通过该装置和方法,手指运动导轨或相应的治疗装置能够快速且以自动化且经济高效的方式适应相应用户的解剖结构。
该目的通过以下方式实现的:用于治疗装置的手指运动导轨的长度调节装置,该治疗装置用于执行手的手指和/或拇指的连续、被动和/或主动辅助运动,具有权利要求1的特征;手指运动导轨,用于执行手的手指和/或拇指的连续、被动和/或主动辅助运动,具有权利要求12的特征;治疗装置,用于对手的至少一个手指和/或拇指进行连续、被动和/或主动辅助运动,具有权利要求13的特征;以及用于调节治疗装置上手指运动导轨长度的方法,用于执行手的至少一个手指和/或拇指的连续、被动和/或主动辅助运动,具有权利要求14的特征。可以单独使用或彼此组合使用的有利实施例和发展是从属权利要求的主题。
根据本发明的长度调节装置包括:
-至少一个调节导轨;
-至少一个保持装置,相对于调节导轨可移动,用于保持手指运动导轨;
-至少一个第一阻挡机构,设置在保持装置上,用于阻挡保持装置沿调节导轨在第一方向上的移动;
-至少一个第二阻挡机构,设置在保持装置上,用于阻挡保持装置沿调节导轨在第二方向上的移动;
-至少一个托架,
-其中,所述托架通过至少一个连接元件可操作地连接到所述手指运动导轨;
-其中,所述托架配置为通过用于移动所述手指运动导轨的驱动器沿着所述调节导轨移动;
-其中,所述托架设计成使得当其通过驱动器沿所述调节导轨在所述第一方向上移动并接触所述第一阻挡机构时,其对所述第一阻挡机构施加力,使得所述第一阻挡机构被释放,所述保持装置连同所述手指运动导轨通过所述托架的运动在第一方向上可移动;
-以及其中,托架设计成使得,当其通过驱动器沿调节导轨在第二方向上移动并接触第二阻挡机构时,其对第二阻挡机构施加力,使得第二阻挡机构被释放,所述保持装置连同所述手指运动导轨通过所述托架的运动在第二方向上可移动。
在长度调节装置的第一实施例中,托架优选能直接可操作地连接到驱动器。在替代后者的优选实施例中,托架还可以通过至少一个连接元件间接地可操作地连接到驱动器。在一个实施例中,托架可以直接可操作地连接到驱动器,特别是通过直接操作连接到驱动器的主轴,允许长度调节装置的设计相对简单,然而,其中托架通过至少一个连接元件可操作地间接连接到驱动器的实施例有利于长度调节装置的相对紧凑且特别扁平的设计。
在另一个实施例中,调节导轨优选为具有至少两个网格元件的网格导轨。具有至少两个网格元件的网格导轨有利地允许以简单方式将保持装置以及因此也包括手指运动导轨锁定在治疗装置上。
这里优选的是,至少两个网格元件基本上以楔形(三角形)和/或半圆形状和/或以鲁洛(Reuleaux)三角形的形式从调节导轨的平面突出。以这种方式从调节路径平面突出的网格元件有利地允许正锁定,其中,通过楔形(三角形)形状和/或半圆形状和/或Reuleaux三角形的形状,在托架施加的力下,可以更容易地克服阻挡机制的影响(用更少的力),例如,如果网格元件以长方体形状从平面中突出,则情况会有所不同。
或者,至少两个网格元件也可以形成为调节导轨内的孔。具有孔作为多孔板意义上的网格元件的调节导轨有利地允许调节导轨的扁平设计。
在另一个实施例中,保持装置优选地具有用于保持阻挡机构的第一侧壁和用于保持手指运动导轨的第二侧壁,所述壁至少通过基座元件彼此连接,由此形成基本上U形的横截面,调节导轨穿过该横截面。基本上呈U形的保持装置有利地允许简单且具有成本效益的生产,这取决于所选择的材料,例如通过弯曲金属板、通过注塑或3D打印。此外,这样的保持装置可以容易地沿着调节导轨移动。
在替代实施例中,如果调节导轨包括沿其纵轴的第一侧壁和第二侧壁,则其已被证明是有用的,其中第一侧壁、调节导轨和第二侧壁一起形成基本上U形的横截面,并且其中,保持装置布置在基本上U形的横截面内,以便相对于调节导轨可移动。这样的实施例有利地导致长度调节装置的特别扁平的设计,从而导致手指运动导轨或治疗装置上的小空间需求。
根据本发明,还优选长度调节装置的一个实施例,其中各阻挡机构具有至少一个固定装置,该固定装置布置在保持装置上,优选地布置在第一侧壁上;在保持装置上铰接的阻挡杆,优选在第一侧壁上,以便能够通过旋转轴可旋转;以及相对于固定装置的阻挡杆的悬挂装置,其中阻挡杆设计为使得当托架与阻挡杆进行操作连接时,阻挡杆从阻挡位置旋转到解锁位置,因此保持装置可在至少一个方向上移动。这样的阻挡机制有利地允许保持装置和由保持装置保持的手指运动导轨的位置沿治疗装置上的调节导轨发生变化,这是由托架和手指运动导轨的驱动引起的。
或者,阻挡机构也可以设计成一件式,并由弹性材料制成,特别是弹簧钢和/或硬橡胶。固定装置和阻挡杆可有利地由单块弹性材料形成,其中阻挡杆相对于固定装置成一定角度布置,阻挡杆和固定装置之间的交点可对应于旋转轴。在本实施例中,悬挂装置可由弹性材料本身的弹簧特性代替,尤其是弹簧钢和/或硬橡胶,因此,每个阻挡机构可有利地省略一个部件,并且阻挡机构的尺寸可减小。
此外,一个实施例已被证明是有用的,在该实施例中,处于其各自阻挡位置的阻挡杆可操作地连接到调节导轨,特别是连接到设计为网格导轨的调节导轨的网格元件,并且在其各自的解锁位置,不可操作地连接到调节导轨,特别是设计为网格导轨的调节导轨的网格元件。如果阻挡杆可操作连接到调节导轨,特别是连接到设计为网格导轨的调节导轨的网格元件,则有利地防止保持装置沿调节导轨的移动,并将手指运动导轨保持在稳定和安全的位置,使治疗运动能够安全地进行。如果阻挡杆未可操作地连接至调节导轨,特别是连接至设计为网格导轨的调节导轨的网格元件,则可有利地将保持装置沿调节导轨移动至任何所需位置,或在调节导轨设计为网格导轨的情况下,放置到取决于网格元件或孔的位置。
在另一个实施例中,优选驱动器是线性驱动器,尤其是主轴电机、气缸、液压缸和/或拉线。线性驱动有利地允许托架的受控运动,从而在治疗运动期间允许手指运动导轨的受控运动,以及在沿调节导轨进行长度调节期间允许保持装置和手指运动导轨的受控运动。
本发明还涉及一种手指运动导轨,用于执行手的手指和/或拇指的连续、被动和/或主动辅助运动,包括如权利要求1至11中任一项所述的长度调节装置。
此外,本发明还涉及一种治疗装置,用于执行手的至少一个手指和/或拇指的连续、被动和/或主动辅助运动,包括如权利要求12所述的至少一个手指运动导轨。
最后,本发明涉及一种用于调节治疗装置上手指运动导轨长度的方法,该治疗装置用于执行手的至少一个手指和/或拇指的连续、被动和/或主动辅助运动,该方法的特征在于,手指运动导轨的连接元件,设置在保持装置上,在驱动器的帮助下并通过托架沿着调节导轨从治疗运动的幅度移动到第一或第二调节范围;其中,当托架通过驱动器沿调节导轨在第一方向上移动至第一调节范围并接触第一阻挡机构时,托架在第一阻挡机构上施加力,使得第一阻挡机构被释放,保持装置连同手指运动导轨通过托架的移动在第一方向上移动,其中托架通过驱动器沿第二方向沿着调节导轨移动到第二调节范围并接触第二阻挡机构时,在第二阻挡机构上施加力,使得第二阻挡机构被释放,并且保持装置连同手指运动导轨通过托架的移动在第二方向上移动。
根据本发明的长度调节装置或根据本发明的长度调节方法有利地允许手指运动导轨在已经存在于用于手指运动导轨的治疗装置上的驱动器的帮助下沿着调节导轨自动移动,并根据用户的手指长度或手的大小/长度,将其固定在调节导轨上,从而固定在治疗装置上的所需位置,以便能够在稳定位置执行手的手指和/或拇指的连续、被动和/或主动辅助运动。因此,有利地避免了耗时的手动调节。
附图说明
下面参考优选示例性实施例并结合附图描述本发明的附加细节和进一步优点。
在示意图中:
图1示出了根据本发明的长度调节装置的实施例的透视图;
图2示出了根据图1的长度调节装置的一部分,其具有处于解锁位置的阻挡杆;
图3a示出了图1和图2在方向B1上移动期间的长度调节装置,其中第二阻挡机构的阻挡杆位于网格元件上方的最大偏转位置;
图3b示出了图3a中的长度调节装置,其中第二阻挡机构的阻挡杆处于最小偏转位置;
图4a和图4b示出了根据本发明的阻挡机构的第一个多部件实施例(图4a)和由弹簧钢制成的根据本发明的阻挡机构的第二个一件式设计(图4b)的示意性比较;
图5示出了根据本发明的具有手指运动导轨的长度调节装置的第二实施例;和
图6示出了具有长度调节装置和驱动器的手指运动导轨的实施例的侧视图。
具体实施方式
在本发明的优选实施例的以下描述中,相同的参考符号表示相同或可比较的组件。
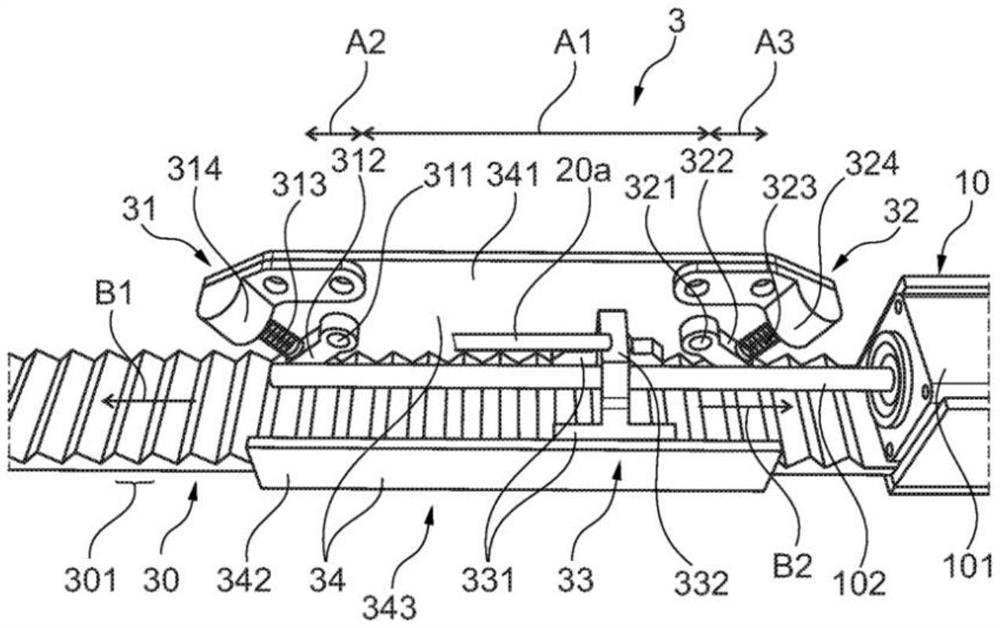
图1示出了根据本发明的长度调节装置3的实施例的透视图。用于治疗装置1的手指运动导轨2的长度调节装置3,用于执行手的手指和/或拇指的连续、被动和/或主动辅助运动,包括至少一个调节导轨30;至少一个保持装置34,其相对于调节导轨30可移动,用于保持手指运动导轨2;设置在保持装置34上的至少一个第一阻挡机构31,用于阻挡保持装置34沿调节导轨30在第一方向B1上的移动,以及设置在保持装置34上的至少一个第二阻挡机构32,用于阻止保持装置34沿调节导轨30沿第二方向B2移动。
图2示出了根据图1的长度调节装置3的一部分,其中阻挡杆312处于解锁位置P2。
如图1和图2所示,保持装置34可以优选地具有用于保持阻挡机构31和32的第一侧壁341和用于保持手指运动导轨2的第二侧壁342,所述壁至少通过基座元件343彼此连接,因此,形成基本上U形的横截面,调节导轨30穿过该横截面。
此外,根据本发明的长度调节装置3包括至少一个托架33,其中托架33可通过至少一个连接元件20a、20b(参见图6)可操作地连接到手指运动导轨2,其中,托架33配置为通过用于移动手指运动导轨2的驱动器10沿着调节导轨30移动。例如,如图1和图2中所示,为此目的,托架33可以直接操作连接到驱动器10,特别是通过直接可操作地连接到驱动器10的主轴102。托架33根据本发明设计为,当其通过驱动器10沿着调节导轨30在第一方向B1上移动并接触第一阻挡机构31时,其对第一阻挡机构31施加力,使得第一阻挡机构31被释放,并且,通过托架30的移动,保持装置34连同手指运动导轨2在第一方向B1上可移动。
图3a和3b示出了保持装置34沿调节导轨30在第一方向B1上的这种移动。
为了沿着调节导轨30将保持装置34从固定在调节导轨30上的操作位置移动到另一个位置,从而调节手指运动导轨2的长度,在保持装置34上布置的手指运动导轨2的连接元件20a或20b(参见图6)在驱动器10的帮助下移动,特别是通过由驱动器10的电机101驱动的主轴102,并通过沿调节导轨30的托架33,从治疗运动的幅度A1到第一调节范围A2或第二调节范围A3。当托架33通过驱动器10,特别是通过驱动器10的电机101驱动的主轴102沿第一方向B1沿着调节导轨30移动到第一调节范围A2并接触第一阻挡机构31时,托架33在第一阻挡机构31上施加力,使得第一阻挡机构31被释放,并且保持装置34连同手指运动导轨2通过托架30的移动在第一方向B1上移动。如图2所示,在克服悬挂装置313的弹簧力作用下,通过托架33的滑动脚331将阻挡杆312从调节导轨30或其网格元件31上移开,因此,阻挡杆312和调节导轨30之间的相互作用被取消,并且允许托架33连同保持装置34和手指运动导轨2一起移动。在此处所示的实施例中,托架33可包括两个滑动脚331和将滑动脚331彼此连接的横向元件332,使得托架33在平面图中尤其具有H形配置。第二阻挡机构32的阻挡杆322不阻挡保持装置34在第一方向B1上的移动,但是可以简单地由托架33移动的保持装置34拉动。
图3a示出了图1和图2的长度调节装置3在沿方向B1移动期间,其中第二阻挡机构32的阻挡杆322位于网格元件301上方的最大偏转位置。图3b示出了相同的长度调节装置3,其中第二阻挡机构32的阻挡杆322处于最小偏转位置。
这同样适用于反向的第二方向B2的运动。根据本发明的长度调节装置3的托架30设计为使得,当其通过驱动器10,特别是通过驱动器10的电机101驱动的主轴102沿调节导轨30沿第二方向B2移动并接触第二阻挡机构32时,它在第二阻挡机构32上施加力,使得第二阻挡机构32被释放,并且保持装置34连同手指运动导轨2通过托架30的移动在第二方向B2上移动。在这种情况下,当托架30通过驱动器10沿第二方向B2沿着调节导轨30移动到第二调节范围A3并接触第二阻挡机构32时,托架30在第二阻挡机构32上施加力,使得第二阻挡机构32被释放,并且,通过托架33的移动,保持装置34连同手指运动导轨2在第二方向B2上移动。此处也可通过滑动脚331施加力。第一阻挡机构31的阻挡杆312不阻挡保持装置34在第二方向B2上的移动,但是可以简单地由托架33移动的保持装置34拉动。
调节导轨30尤其可以是具有至少两个网格元件301的网格导轨。至少两个网格元件301可以基本上以楔形(三角形)(如图1至3b所示)和/或半圆形状和/或以Reuleaux三角形的形式从调节导轨30的平面突出。在图2、3a和3b中,可以看到阻挡杆31和32如何与以这种方式从调节导轨30平面突出的网格元件301相互作用,这样,在一个运动方向B1或B2上的一个阻挡杆31或32阻挡保持装置34的运动,并且在各自的另一个运动方向上的阻挡杆31或32可以被拉离网格元件301。
阻挡机构31和32优选地各自至少包括:固定装置314、324,其布置在保持装置34上,优选地布置在第一侧壁341上;阻挡杆312、322铰接在保持装置34上,优选在第一侧壁341上,以便可通过旋转轴311、321旋转;以及相对于固定装置314、324的阻挡杆312、322的悬挂的装置313、323;其中,阻挡杆312、322设计成使得,当托架33与阻挡杆313、323操作连接时,阻挡杆312、323从阻挡位置P1旋转到解锁位置P2,并且保持装置34因此在至少一个方向B1、B2上可移动。此外,位于各自阻挡位置P1的阻挡杆313、323可操作地连接至调节导轨30,特别是连接至设计为网格导轨的调节导轨30的网格元件301,并且在各自的解锁位置P2,优选地非可操作地连接至调节导轨30,特别是连接至设计为网格导轨的调节导轨30的网格元件301。
作为所述阻挡机构31、32的多部件设计的替代方案,阻挡机构31、32还可以有利地设计成一件式,并由弹性材料,特别是弹簧钢和/或硬橡胶形成。
图4a和图4b示出了根据本发明的阻挡机构31、32的第一个多部分实施例(图4a)和由弹簧钢制成的根据本发明的阻挡机构31、32的第二个一件式的实施例(图4b)的示意性比较。可以看出,在本实施例中,固定装置314、324和阻挡杆313、323可以有利地由单块弹性材料形成,例如由弹簧钢和/或硬橡胶制成,其中阻挡杆313、323优选地布置在相对于固定装置314、324成一定角度的位置,并且阻挡杆313、323和固定装置314、324之间的交点可以对应于旋转轴311、321。
作为设计为网格导轨的调节导轨30的替代方案,其具有至少两个从调节导轨30的平面突出的网格元件301,设计为网格导轨的调节导轨30的至少两个网格元件301也可以配置为调节导轨30内的孔(未示出)。
图5示出了根据本发明的具有手指运动导轨2的长度调节装置3的第二实施例,其中调节导轨30优选地包括沿其纵轴的第一侧壁302和第二侧壁303,其中第一侧壁302、调节导轨30和第二侧壁303一起形成基本上U形横截面,并且其中,尤其是保持装置34布置在基本上U形横截面内,以便相对于调节导轨30可移动。为了获得这种相对紧凑的设计,托架33在此优选地通过至少一个连接元件103间接地可操作地连接到驱动器10(也参见图6)。
图6最后示出了具有长度调节装置3和驱动器10的手指运动导轨2的实施例的侧视图。驱动器10可以优选为线性驱动器,尤其是主轴电机、气缸、液压缸和/或拉线。图6示出了设计为主轴电机的驱动器10的示例,其中电机101驱动主轴102,而主轴102又通过至少一个连接元件103与托架33交互。为此,连接元件103可优选地包括至少一个部分,该部分在由调节导轨30、第一侧壁302和第二侧壁303形成的基本上U形横截面内运行(在该连接中也参见图5)。
根据本发明的长度调节装置3或根据本发明的长度调节方法有利地允许手指运动导轨2借助于已经存在于用于手指运动导轨2的治疗装置1上的驱动器10沿着调节导轨30自动移动,并且,根据用户的手指长度或手的大小/长度,将其固定在调节导轨30上,从而固定在治疗装置1上的所需位置,以便能够在稳定位置执行手的手指和/或拇指的连续、被动和/或主动辅助运动。因此,有利地避免了耗时的手动调节。
附图标记
1治疗装置
10驱动器
101电机
102主轴
103连接元件
2手指运动导轨
20a/b连接元件
3长度调节装置
30调节导轨
301网格元件
302第一侧壁
303第二侧壁
31第一阻挡机构
311第一旋转轴
312第一阻挡杆
313悬挂的第一装置
314第一固定装置
32第二阻挡机构
321第二旋转轴
322第二阻挡杆
323悬挂的第二装置
324第二固定装置
33托架
331滑动脚
332横向元件
34保持装置
341第一侧壁
342第二侧壁
343基座元件
B1第一方向
B2第二方向
P1阻挡位置
P2解锁位置
A1治疗运动的幅度
A2第一调节范围
A3第二调节范围