一种气动软手指及基于气动软手指的硬度识别系统
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及柔性传感器技术领域,特别是指一种气动软手指及基于气动软手指的硬度识别系统。
背景技术
作为能够将外部压力转换成电信号的有效媒介,压力传感器已经成为了当下炙手可热的研究方向之一,其中电容式压力传感器因其本身结构简单、迟滞低等诸多优点无疑受到了大量科研人员的青睐。而作为传感器重要的性能指标,灵敏度的提高一直被视作大部分研究的重点。目前,设计微结构介电层和掺杂高介电常数材料已经被证实了其在调节灵敏度方面的有效性。然而,大量研究结果表明,传感器通常在整个测量范围内表现出分段式的响应,即随着压力的逐渐升高,传感器的灵敏度逐渐下降,这也就导致了信号应用难度的增加。为解决这一问题,大量的科研工作者致力于制造线性度高的电容式压力传感器。结构的优化、特殊材料的掺杂作为改善传感器线性度的方法已经得到了验证,但是传感器本身表现出较低的灵敏度又限制了其应用。因此设计一种高灵敏度、高线性度的电容式压力传感器仍然是一个挑战,这个难题的攻克将有利于电容式压力传感器在机器人领域,尤其是安全的机械抓取方面的应用。
集成触觉传感器的刚性机械抓手已经实现了在机械抓取方面的广泛应用,但是其本身的刚性结构在抓取柔软、易碎物体时却暴露了劣势所在,即难以避免因抓取力度的控制不当而导致的物体损伤。而近些年来,本体刚度相对较低的柔性机器人的出现有效降低了物体损伤的概率。同时,为了更好地实现安全抓取,能够直接反应物体物理特征的参数也成为诸多研究的重点,其中就包括硬度的测量。在抓取过程中,预先知晓目标物体的硬度将有利于精准控制抓取力的大小,进而实现对物体的零损伤抓取。因此,在保证物体不受损伤的情况下完成其材料硬度的识别成为了一个理想的研究目标。
发明内容
针对上述背景技术中存在的不足,本发明提出了一种气动软手指及基于气动软手指的硬度识别系统,给出了本体刚度相对较低的柔性机器人的硬度的测量系统,保证了物体安全的前提下实现了对物体硬度的线性响应。
本发明的技术方案是这样实现的:
一种气动软手指,包括软手指本体,软手指本体为底部开口的圆柱形腔体,软手指本体的顶端设有腔体,腔体的外表面集成了柔性电容式压力传感器,腔体与进气通道相连通,进气通道与外部气体管道相连通;软手指本体的外表面设有布线槽,布线槽内固定安装有传感器信号测量线。
所述腔体设有3个,均匀设置软手指本体的顶端;所述柔性电容式压力传感器设有3个;所述进气通道设有3个;所述布线槽设有6个。
所述柔性电容式压力传感器包括上层柔性电极和下层柔性电极,上层柔性电极和下层柔性电极中间填充有介电层。
所述上层柔性电极和下层柔性电极均为表面镀有氧化铟锡的聚对苯二甲酸乙二醇酯;所述介电层为自发形成的褶皱状微结构薄膜。
一种基于气动软手指的硬度识别系统,包括处理组件I、处理组件II、气路系统和控制单元;处理组件I与气路系统相连接,气路系统分别与处理组件II、控制单元相连接,控制单元与处理组件II相连接。
所述气路系统包括软手指本体、空气压缩机、气压调节比例阀、电压放大电路和气压表;
所述处理组件I包括电源I、电源II、电源III、微控制单元I;
所述处理组件II包括电源IV、微控制单元II、LCR数字电桥;
所述控制单元包括计算机、滑台控制器、滑台;
所述微控制单元I与电压放大电路相连接,电压放大电路和空气压缩机均与气压调节比例阀相连接,气压调节比例阀分别与软手指本体、气压表相连接,软手指本体上的3个柔性电容式压力传感器均与微控制单元II相连接,微控制单元II与LCR数字电桥相连接,LCR数字电桥与计算机相连接,计算机上设有电容值显示屏,计算机与滑台控制器相连接,滑台控制器与滑台相连接,滑台上放置有待测物体,待测物体与柔性电容式压力传感器相接触;
所述电源I为气压调节比例阀供电,电源II为电压放大电路供电,电源III为微控制单元I供电,电源IV为微控制单元II供电。
与现有技术相比,本发明产生的有益效果为:
1)本发明设计了一种具有高灵敏度、高线性度的柔性电容式压力传感器,又将其集成在自主设计的气动软手指上,并通过微控制单元、气压调节比例阀等气路组件调节气动软手指腔体内部气压,从而完成对材料硬度的识别;
2)柔性电容式压力传感器采用柔性电极及带有褶皱状微结构的介电层,介电层采用旋涂多壁碳纳米管和聚二甲基硅氧烷的混合液体即可制得,由于多壁碳纳米管的高介电常数以及褶皱状微结构的出现使得柔性电容式压力传感器表现出杰出的灵敏度和线性度;
3)通过结合用于硬度检测的柔性电容式压力传感器、用于供气的气路系统和用于处理信号的处理组件,硬度识别系统在保证物体安全的前提下实现了对物体硬度的线性响应,其灵敏度的可调性将通过控制气动软手指腔体内部气压完成;硬度识别系统在充气状态和未充气状态下均可区分生肉的硬度,为代替直肠指诊进行直肠肿瘤检测提供了可能性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例的柔性电容式压力传感器的组成示意图;
图2为本发明实施例的柔性电容式压力传感器的截面示意图;
图3为本发明实施例的柔性电容式压力传感器的多壁碳纳米管混合比例对传感器性能影响的结果图;
图4为本发明实施例的柔性电容式压力传感器的性能表征结果图;
图5为本发明实施例的集成柔性电容式压力传感器的气动软手指的组成示意图;
图6为本发明实施例的气动软手指的截面示意图;
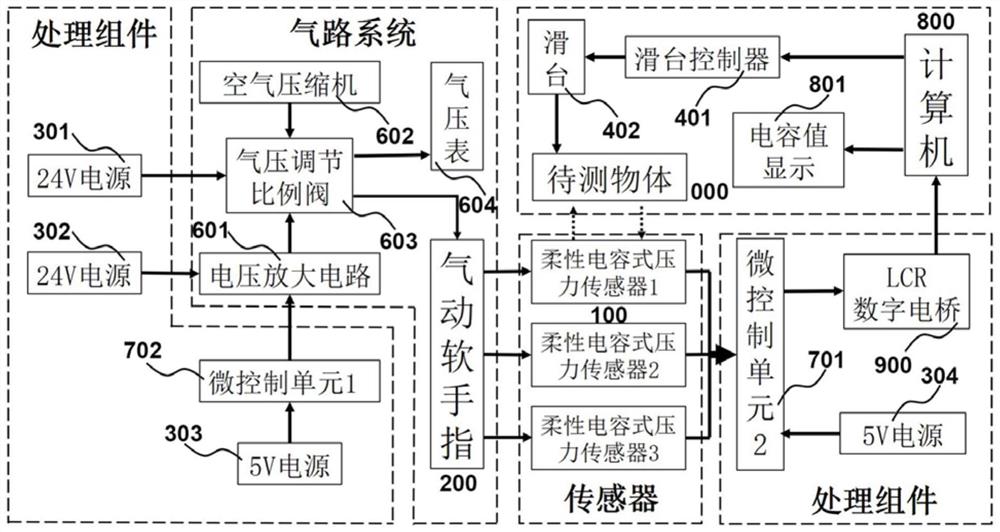
图7为本发明实施例的基于气动软手指的硬度识别系统的组成示意图;
图8为本发明实施例的基于气动软手指的硬度识别系统在腔体内部不同气压条件下的硬度测量结果图;
图9为本发明实施例的基于气动软手指的硬度识别系统在腔体充气和未充气状态下对生肉硬度识别的结果图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1和2所示,柔性电容式压力传感器100采用经典的三明治结构,主要由上下柔性电极101、103和中间介电层102构成,其输出可根据平行平板电容器的计算公式
如图3所示,多壁碳纳米管在聚二甲基硅氧烷中的混合比例将影响柔性电容式压力传感器100的灵敏度和线性度。随着多壁碳纳米管混合比例的增加,介电层102呈现出逐渐粗糙的褶皱状表面形貌,这使得柔性电容式压力传感器100对外部压力的灵敏度明显升高,并且逐渐对外部压力表现出优良的的线性响应。
如图4所示,当介电层102中混合了2.6 wt%的多壁碳纳米管,柔性电容式压力传感器100在0.0002-21 kPa的压力范围内表现出了最高的灵敏度和和线性度,分别为为1.448kPa
相比于光滑的膜状介电层,带有褶皱状微结构的介电层将降低与电极之间的接触面积,故而在受到外部压力时,由于应力集中的原因将更容易发生形变,进而促进传感器的上下电极间距的减小,这有效地提高了传感器的灵敏度。然而随着压力的增大,介电层102表面的褶皱状微结构被压平,此时仅相当于光滑的膜状介电层将不再容易发生形变,导致了传感器的灵敏度大幅度下降。而混合了具有高介电常数的多壁碳纳米管的介电层实现了其本身介电常数的增加,这使得即使介电层的形变量很小,传感器的输出电容也表现出一个明显的增量。因此在高压力范围内,介电常数的增加补偿了其形变量减小对于传感器输出电容变化的影响。综上,褶皱状微结构的形成和多壁碳纳米管恰当的混合比例使柔性电容式压力传感器表现出了高灵敏、高线性度。因此,将柔性电容式压力传感器100集成在气动软手指上。
实施例1,如图5和6所示,一种气动软手指,包括软手指本体200,软手指本体200为底部开口的圆柱形腔体,本实施例中的气动软手指完全由多材料3D打印技术制造,这里选用了邵氏硬度分别为30度和60度的软胶材料。软手指本体200的顶端设有腔体201,腔体201的外表面集成了柔性电容式压力传感器100,腔体201与进气通道202相连通,进气通道202与外部气体管道205相连通;软手指本体200的外表面设有布线槽204,布线槽204设有6条,布线槽204内固定安装有传感器信号测量线203。
在接近气动软手指顶端的位置均匀设有3个由30度软胶材料制成的腔体201,这些腔体能够在给其充气时发生明显膨胀。而用于腔体和气路系统连接的进气通道202由60度软胶材料打印而成,这些较硬的材料极大地的削弱了气动软手指在充气状态下进气通道202的径向扩张。
柔性电容式压力传感器100用硅胶将其牢牢固定在软手指本体200的腔体201的外表面。同时将传感器信号测量线203用硅胶将其牢牢固定在布线槽204内,并用硅胶将布线槽204完全填满加以打磨,最终实现一个表面光滑的集成柔性电容式压力传感器100的软手指本体200。
实施例2,如图7所示,一种基于气动软手指的硬度识别系统,包括处理组件I、处理组件II、气路系统和控制单元;处理组件I与气路系统相连接,气路系统分别与处理组件II、控制单元相连接,控制单元与处理组件II相连接。
气路系统包括软手指本体200、空气压缩机602、气压调节比例阀603、电压放大电路601和气压表604;处理组件I包括电源I 301、电源II 302、电源III 303、微控制单元I702;处理组件II包括电源IV 304、微控制单元II 701、LCR数字电桥 900;控制单元包括计算机800、滑台控制器401、滑台402;微控制单元I 702与电压放大电路601相连接,电压放大电路601和空气压缩机602均与气压调节比例阀603相连接,气压调节比例阀603分别与软手指本体200、气压表604相连接,用来监测软手指本体200的气压,软手指本体200上的3个柔性电容式压力传感器100均与微控制单元II 701相连接,微控制单元II 701与LCR数字电桥900相连接,LCR数字电桥900与计算机800相连接,计算机800上设有电容值显示屏801,用于显示测量过程中的电容值,计算机800与滑台控制器401相连接,滑台控制器401与滑台402相连接,滑台402上放置有待测物体000,待测物体000与柔性电容式压力传感器100相接触;所述电源I 301为气压调节比例阀603供电,电源II 302为电压放大电路601供电,电源III303为微控制单元I 702供电,电源IV 304为微控制单元II 701供电。
在气路系统中,空气压缩机602连接气压调节比例阀603的输入端口,此过程需要谨慎控制空气压缩机602的输出气压,使其不要超过气压调节比例阀603可承受的最大输入气压,以免损坏气压调节比例阀603。由于气压调节比例阀603仅含有一个输出端口,若要满足对气动软手指3个腔体201的同时供气,就需要将一个输出端口通过2个一转二气动气管接头扩充为四个输出端口。其中三个端口用于气动软手指3个腔体201的供气,另一个端口直接连接气压表604,用来实时监测软手指本体200的腔体201内部气压。最后使用气体管道205实现气压调节比例阀603的输出端口和气动软手指的进气通道202之间的连接,从而实现给腔体201的供气。
气路系统中可以使用3个气压调节比例阀603用于对3个腔体201的独立供气,这有利于实现腔体之间的独立性,更适用于3个腔体201无定时相互配合或独立工作的应用场景。然而,为满足对每个腔体201的内部气压监测,配备的气压表604数量也将增加至3个。因此,两种配置方案的选择需要结合实际应用的环境。本发明的验证实验中仅使用了1个气压调节比例阀603和1个气压表604。
在处理组件中,由于气压调节比例阀603需要用电压信号控制其输出气压的改变,一个可以输出可调电压的微控制单元I 702作为此控制信号的来源。为了能够更好的控制气压调节比例阀603的输出气压,将采用人为控制微控制单元I 702输出电压的改变,即按一下控制电压升高的按键,微控制单元I 702的输出电压升高一次,否则将保持输出电压不变。同理,按一下控制电压降低的按键,微控制单元I 702的输出电压才降低一次。值得说明的是操作一次电压升高或降低的幅度的可调性,可以通过考量气动软手指的充气速度需求而编写微控制单元I 702执行的程序来实现。同时,微控制单元I 702的复位按键也提供了将微控制单元I 702的输出电压直接降为0V的功能,这将有利于软手指本体200的迅速排气。但是由于微控制单元I 702仅能输出0-3.3V的电压,而0-10V的电压才能对气压调节比例阀603的输出气压实现任意调节。因此微控制单元I 702的输出电压经过一个电压放大电路601后供给气压调节比例阀603使用。另一个微控制单元II 701将用来切换需要采集信号的柔性电容式压力传感器100所对应的通道,由此可以通过分时复用实现一个LCR数字电桥900对多个柔性电容式压力传感器100信号的采集,进而分析不同柔性电容式压力传感器100当前接触物体的硬度。
微控制单元I 702可以通过程序控制其输出固定幅值的电压信号,这不仅减少了对气动软手指的充气时间,还规避的由于人为误操导致不正确电压信号的输出的风险。然而固定电压信号输出的弊端体现在不能随意更改气压调节阀的输出气压,仅有的办法是更改微控制单元I 702的执行程序。本发明的验证实验中采用人为控制微控制单元I 702的电压输出。
另外,基于气动软手指的硬度识别系统还需两个24V直流电源301、302对气压调节比例阀603和电压放大电路601进行供电。这里对气压调节比例阀603的供电不同于微控制单元I 702和电压放大电路601对其的供电,24V直流电源301使其处于待工作的开机状态,而微控制单元I 702和电压放大电路601的作用是控制其工作时的输出气压,即0-10V的输入电压对应着其输出气压的0-100 kPa。同时两个微控制单元701、702也各自需要5V电源303、304作为供电组件。本发明的验证实验中,使用计算机USB代替5V电源。
基于气动软手指的硬度识别系统工作时,首先将柔性电容式压力传感器100通过微控制单元701与LCR数字电桥900连接,并将LCR数字电桥900与计算机800连接,通过电容值显示屏显示测量过程中的电容值。开始给电压放大电路601、空气压缩机602、气压调节比例阀603供电。将待测物体000固定在由计算机800控制的滑台402上,并使待测物体000与柔性电容式压力传感器100保持平行,保证其能与柔性电容式压力传感器100完全接触。驱动滑台402使待测物体000靠近处于未充气状态的软手指本体200,在柔性电容式压力传感器100的电容明显变化的瞬间,立即停止滑台402的移动,并将此时待测物体000与柔性电容式压力传感器100之间的相对位置作为硬度识别的初始条件。通过微控制单元702间接控制气压调节比例阀603的工作电压,从而改变软手指本体200腔体201的内部气压。随着腔体201内部气压的逐渐升高,腔体201逐渐膨胀。当腔体201的内部气压达到预期值时,停止微控制单元I 702的输出电压的改变,此时柔性电容式压力传感器100也对待测物体000的挤压程度达到最大。由于作用力与反作用力的存在,柔性电容式压力传感器100也将受一定的压力促使其输出电容发生变化。整个过程的输出电容的变化将被完全显示在计算机上的电容值显示屏801上。当结束硬度识别时,只需通过微控制单元I 702的复位按键即可将软手指本体200迅速完全排气。
硬度识别原理为:当软手指本体200的腔体201由未充气时的初始状态转换到充气时的膨胀状态的过程中,柔性电容式压力传感器100逐渐向待测物体000方向运动。然而,基于气动软手指的硬度识别系统中定义硬度识别的初始条件为待测物体000与柔性电容式压力传感器100恰好接触,即无缝隙。因此待测物体000将阻碍柔性电容式压力传感器100的移动,同时施加给柔性电容式压力传感器100一个反方向的力,这使得柔性电容式压力传感器100的介电层102发生形变,导致上下柔性电极101、103间距减小,从而产生了输出电容的变化。随着待测物体000硬度的增加,待测物体000阻碍柔性电容式压力传感器100的能力变强,使施加给柔性电容式压力传感器100的力增加,从而提高柔性电容式压力传感器100的输出电容变化。
如图8所示,基于气动软手指的硬度识别系统的电容输出与待测物体000硬度之间呈现出良好的线性关系(R
如图9所示,将生肉(I)和嵌入红豆以增加硬度的生肉(III)作为基于气动软手指的硬度识别系统的两种测试材料,具有明显输出差异的结果证明了此系统对于不同硬度的生肉区分的有效性。另外,在气动软手指未充气状态下,控制滑台使这两种生肉与柔性电容式压力传感器之间满足此系统定义的硬度识别的初始条件,然后继续控制滑台使这两种生肉逐渐挤压柔性电容式压力传感器100。记录的不同电容信号(生肉(II)和嵌入红豆的生肉(IV))验证了此硬度识别系统的软手指本体200在未充气状态下也能够区分带有不同硬度的生肉对其的挤压的能力。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种刚软结合气动可穿戴手指康复装置及其制造方法
- 一种气动软体手指、软体手指控制系统及控制方法