致动器组件
文献发布时间:2023-06-19 18:35:48
领域
本发明涉及一种致动器组件,特别是一种用于实现光学图像稳定(OIS)的致动器组件。
背景
在摄像机中,OIS的目的是补偿摄像机抖动,即通常由用户手移动引起的摄像机振动,其降低由图像传感器捕获的图像的质量。机械OIS通常涉及通过诸如陀螺仪传感器的振动传感器检测振动,并基于检测到的振动来控制调节摄像机设备以补偿振动的致动器装置。
使用机械OIS技术的许多致动器装置是已知的,并成功地应用于相对较大的摄像机设备(诸如数字静态摄像机)中,但难以微型化。摄像机在广泛的便携式电子设备(例如移动电话和平板电脑)中已经变得非常普遍,并且在许多这样的应用中,摄像机的微型化是重要的。微型摄像机设备中的部件的非常紧密的封装给在期望的封装中添加OIS致动器带来了很大的困难。
WO-2017/072525公开了一种安装在载体上的图像传感器,该载体通过滑动支承件(plain bearing)悬挂在支撑结构上,滑动支承件允许载体和图像传感器相对于支撑结构在横向于图像传感器的光敏区域的任何方向上移动。包括多个SMA线的致动器组件被布置成相对于支撑结构移动载体和图像传感器,以提供由图像传感器捕获的图像的OIS。
载体可以将诸如图像传感器之类的高价值部件集成到其中。如果致动器组件有缺陷,则可能需要废弃该设备。废弃部件,特别是高价值部件,增加了制造该设备的平均成本。除其他外,本发明涉及具有较低平均制造成本的致动器组件。本发明还涉及组装这种致动器组件的方法。
概述
根据本发明的一个方面,提供了一种SMA致动器组件,包括:第一部分和第二部分;SMA线,其被布置成在收缩时使第一部分和第二部分相对于彼此移动;压接部(crimpportion),其被配置为保持SMA线,其中压接部相对于第一部分固定;以及中间构件,压接部经由中间构件附接到第一部分;其中,中间构件可移除地结合到第一部分,使得中间构件可从第一部分移除而不会损坏第一部分。
致动器组件被设计成可以完全移除线和压接组件。通过提供中间构件,能够无损地移除和替换有缺陷的压接件。这允许第二线和压接组件被附接在其适当位置中。这允许替换潜在高价值的子组件上的有缺陷的压接件,否则这些子组件将以潜在高成本报废。
根据本发明的一个方面,还提供了一种SMA致动器组件,包括:第一部分和第二部分;SMA线,其被布置成在收缩时使第一部分和第二部分相对于彼此移动;以及压接部,其被配置为保持SMA线,其中压接部相对于第一部分固定;其中,压接部包括:安装部分,其附接到第一部分;线附接部分,其被配置成保持SMA线;以及桥接部分,其将安装部分连接到线附接部分,其中桥接部分包括分开区段(dividing section),使得压接部在分开区段处相对于压接部的相邻区段机械性较弱,以便允许压接部在分开区段处被分开,从而将安装部分与线附接部分分开。
通过在压接部的附接部分和安装部分之间提供分开区段,可以移除有缺陷的压接组件,而不必废弃整个设备。这降低了制造该设备的成本。
根据本发明的一个方面,还提供了一种SMA致动器组件,包括:第一部分和第二部分;SMA线,其被布置成在收缩时使第一部分和第二部分相对于彼此移动;压接部,其被配置为保持SMA线,其中压接部相对于第一部分固定;其中,压接部包括:安装部分,其相对于第一部分固定;线附接部分,其被配置成保持SMA线;以及桥接部分,其将安装部分连接到线附接部分;以及另一压接部的另一安装部分,所述其它安装部分附接到第一部分。
通过提供另一压接部的另一安装部分,通过移除有缺陷的压接组件(尽管将有缺陷的压接组件的安装部分留在适当位置)并用另一压接组件替换有缺陷的压接组件的过程来形成致动器组件。这样的过程允许SMA致动器组件的高值部分在被发现有缺陷后被重新使用。这降低了制造该设备的平均成本。
当应用于其中第一部分包括可以集成到第一部分中的电子装置的致动器组件时,本发明提供了特别的优点。可选地,电子装置包括图像传感器。可选地,电子装置包括与第一部分的多个电连接。第一部分可以包括集成的高价值部件。通过在发现组件不满足要求时重复使用第一部分而不是废弃第一部分,制造该设备的成本显著降低。
本发明还可以体现在一种用于组装SMA致动器组件的方法中,该方法包括:将中间构件可移除地结合到第一部分;以及将保持SMA线的压接部附接到中间构件,使得SMA线被布置成在收缩时使第一部分和第二部分相对于彼此移动;其中,中间构件可移除地结合到第一部分,使得中间构件可从第一部分移除而不会损坏第一部分。
本发明还可以体现在用于组装SMA致动器组件的方法中,该方法包括:将保持SMA线的压接部固定到第一部分,使得SMA线被布置成在收缩时使第一部分和第二部分相对于彼此移动,其中压接部包括:安装部分,其相对于第一部分固定;线附接部分,其保持SMA线;以及桥接部分,其将安装部分连接到线附接部分;将线附接部与安装部分分开,安装部分保持附接至第一部分;以及将保持另一SMA线的另一压接部附接到第一部分。
附图说明
现在将参考附图仅以示例的方式描述本发明的某些实施例,在附图中:
图1是包括致动器组件的摄像机设备的示意性截面图;
图2是包括滚子支承件的致动器组件的截面图;
图3是致动器组件的互连PCB的下侧的平面图;
图4是从上面看致动器组件的平面图;
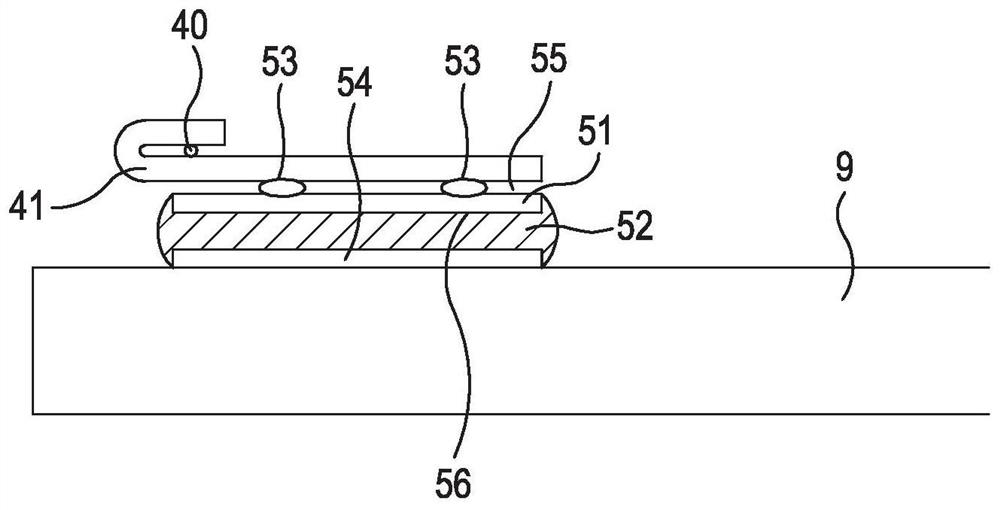
图5是致动器组件的附接压接部的截面图;
图6是致动器组件的可替代压接部的平面图;
图7是在有缺陷的压接组件的部分已经被移除之后的致动器组件的部分的平面图;
图8是致动器组件的替换压接部的平面图;
图9是致动器组件的附接的替换压接部的截面图;以及
图10是致动器组件的可替代替换压接部的截面图。
详细描述
致动器组件的结构
在图1中示出了包含了根据本发明的致动器组件2的摄像机设备1,图1是沿光学轴线O截取的截面图。在所描绘的实施例中,致动器组件2是传感器移位组件。摄像机设备1将被包含在诸如移动电话或平板电脑的便携式电子装置中。因此,微型化是一个重要的设计准则。
致动器组件2在图2至图4中详细示出,图2为致动器组件2的侧视图,图3为致动器组件2的电互连件51的下侧视图;并且图4是致动器组件2的平面图。为了清楚起见,图2和图4省略了下面描述的电互连件51。图3所示的线A-A是图2所示的截面图沿其截取的线。该线不与电互连件51相交。因此,电互连件51未在图2中示出。可以先制造致动器组件2,并且然后将致动器组件2与摄像机设备1的其他部件组装。
致动器组件2包括支撑结构4。支撑结构4包括边缘部10。在支撑结构4上支撑有图像传感器组件12。图像传感器组件12包括具有光敏区域7的图像传感器6,并且通常还包括可移动板9。图像传感器6相对于可移动板9固定。例如,图像传感器6可以安装在可移动板9上。当包含到摄像机设备1中时,光敏区域7与光学轴线O对准并垂直于光学轴线O。图像传感器6捕获图像,并且可以是任何合适的类型,例如CCD(电荷耦合器件)或CMOS(互补金属氧化物半导体)器件。像常规的那样,图像传感器6具有矩形光敏区域7。光敏区域7可以包括像素阵列。在不限于本发明的情况下,在该示例中,摄像机设备1是其中光敏区域7具有最多12mm的对角线长度的微型摄像机。
可选地,可移动板9包括可以被称为移动PCB的印刷电路板PCB。可移动板9可以是移动PCB。可替代地,可移动板9可包括移动PCB和至少一个其它元件,诸如金属板。图像传感器6可以安装在可移动板9的移动PCB上。
图像传感器组件12的可移动板9的移动PCB通过电互连器251电连接到另一PCB。另一PCB可以称为静态PCB,并且可以是支撑结构4的一部分(或相对于支撑结构4固定)。
可选地,边缘部10包括静态PCB。边缘部10可以至少部分地并且可选地完全地由静态PCB形成。在下面的描述中,边缘部10由静态PCB形成,并且可移动板9由移动PCB形成。然而,在替代布置中,静态PCB可以定位于图像传感器组件12和支撑结构4的支撑板5(下面描述)之间。静态PCB可以位于图像传感器6的正下方。
可选地,图像传感器6和电互连器251之间的电连接至少部分地由移动PCB形成。移动PCB用于在图像传感器6和静态PCB之间传递诸如数据信号和功率信号的信号。另外,移动PCB可以包括被配置为作用于由图像传感器6输出的信号的电子部件。例如,移动PCB可以包括诸如电容器的电气部件。期望尽可能地减小图像传感器6和这些电子部件之间的距离,在这种情况下,期望在移动PCB中而不是在静态PCB中提供这些电子部件。图像传感器6与移动PCB之间的距离小于图像传感器6与静态PCB之间的距离。
静态PCB被配置为收集来自移动PCB的信号,并向移动PCB提供信号。静态PCB便于收集用于连接到外部装置(例如移动电话)的信号。
可选地,图像传感器组件12的移动PCB用作可移动板9。图像传感器6可以安装在可移动板9上。
尽管可移动板9可仅包括移动PCB,但可选地,可移动板9可包括可附接到移动PCB或与移动PCB层压的其他层。
可选地,支撑结构4包括支撑板5,支撑板5可以由片材料形成,片材料可以是金属,例如钢(诸如不锈钢)或铜或铜合金。
尽管在该示例中支撑结构4包括单个支撑板5,但可选地,支撑结构4可包括可附接到支撑板5或与支撑板5层压的其他层。
支撑结构4还包括边缘部10。边缘部10可以固定到支撑板5的前侧并至少部分地围绕支撑板5延伸。边缘部10可以具有中心孔11。
摄像机设备1和/或其中集成了摄像机设备1的便携式电子装置包括集成电路(IC)芯片30和陀螺仪传感器31,在所示的示例中,集成电路(IC)芯片30和陀螺仪传感器31固定在支撑板5的后侧上。在IC芯片30中实施下面进一步描述的控制电路。
图像传感器组件12以允许图像传感器组件12相对于支撑结构4在横向于光敏区域7(即,光学轴线O的横向并平行于光敏区域7延伸的平面)的任何方向上移动的方式支撑在支撑结构4上。因此,图像传感器组件12可以以抑制图像传感器组件12在垂直于光敏区域7的方向上移动的方式被支撑。图像传感器组件12还以允许图像传感器组件绕平行于光学轴线O的任何轴线(即,平行于与光敏区域延伸的平面正交的任何轴线)旋转的方式支撑在支撑结构4上。因此,图像传感器组件12可以以抑制图像传感器组件12绕平行于光敏区域7的任何轴线倾斜或旋转的方式被支撑。
WO-2017/072525公开了用于以允许上述移动的方式将图像传感器组件支撑在支撑结构上的滑动支承件的使用。这样的滑动支承件包括两个支承表面,其相互支承,允许相对滑动运动。这样的滑动支承件可以是紧凑的并且有助于图像传感器组件和支撑结构之间的热传递。然而,在某些应用中,与其中提供滑动支承件的布置相比,可能期望减小图像传感器组件和支撑结构之间的摩擦。
在所示的实施例中,图像传感器组件12通过支承装置110(下面描述)支撑在支撑结构4上,使得在图像传感器组件12和支撑结构4之间形成间隙104。间隙104形成在图像传感器组件12的背离光敏区域7的一侧上,特别是在垂直于光敏区域7的方向上。特别地,间隙104形成在图像传感器组件12和支撑板5之间。
互连件
图3是边缘部10和可移动板9的下侧的平面图。在图3所示的布置中,边缘部10由静态PCB形成,并且可移动板9由可移动PCB形成。图3可以是图2(或图5、图7或图9)所示的致动器组件2的下侧视图,其中移除了支撑板5和支承装置110。
如图3所示,致动器组件2包括电互连器251。电互连器251被配置成将静态PCB 10电连接到移动PCB 9。电互连器251可以被配置成在静态PCB 10和移动PCB 9之间传递数据。例如,由图像传感器6获取的图像数据可以经由电互连器251从移动PCB 9传递到静态PCB10。电互连器251可以被配置为从静态PCB 10到移动PCB 9为图像传感器6供应功率。通常,电互连器251被配置成在静态PCB 10和移动PCB 9之间的任一方向上传递诸如功率和数据的电信号。电互连器251还可以被配置为从静态PCB 10到移动PCB 9传递用于驱动SMA线40的信号(或提供用于驱动SMA线40的信号的公共返回路径)。
如图3所示,可选地,电互连器251包括多个金属挠曲件。电互连器251可包括多组挠曲件。每组挠曲件通常用于在静态PCB 10的相应侧和移动PCB 9之间提供电连接。每组中的挠曲件的数量可以为一个、两个、三个、四个、五个、六个或更多个。尽管未在图3中示出,可选地,给定组内的挠曲件被布置为彼此处于相同定向。例如,一组内的挠曲件可彼此平行。挠曲件的组的数量例如可以为一个、两个、三个、四个或多于四个。
可选地,电互连器251的挠曲件通常在与静态PCB 10在其中延伸的平面平行的平面中延伸。挠曲件通常可在垂直于致动器组件2的主轴线的平面中延伸。致动器组件2的主轴线垂直于支撑板5在其中延伸的平面。当图像传感器6相对于支撑结构4处于其中立(即,未倾斜)位置时,主轴线垂直于图像传感器6的光敏区域7在其中延伸的平面。主轴线可以对应于图1所示的光学轴线O。
电互连器251可以被配置为当移动PCB 9相对于静态PCB 10移动时挠曲。在移动PCB 9相对于静态PCB 10移动期间,维持静态PCB 10和移动PCB 9之间的电连接。例如,电互连器251的挠曲件可以在与静态PCB10在其中延伸的平面平行的平面中挠曲,即在垂直于致动器组件2的主轴线的平面中挠曲。如图3所示,电互连器251的每个挠曲件可以包括至少一个弯曲部。弯曲部被配置成在静态PCB 10和移动PCB 9之间的相对移动期间促进挠曲件的挠曲。尽管未在图3中示出,但是可选地,每个挠曲件可以包括仅一个弯曲部。每个挠曲件可以形成L形。
可选地,在移动PCB 9相对于静态PCB 10移动期间,电互连器251的挠曲件基本上保持在垂直于主轴线的平面内。可替代地,电互连器251可以至少部分地在平行于主轴线的方向上挠曲。电互连器251可以朝向支撑板5延伸到间隙104中。
在静态PCB位于移动PCB下方的替代布置中,电互连件可以位于移动PCB下方和静态PCB上方。电互连件可包括柔性印刷电路。
带有中间构件的压接件
图5是固定到可移动板9的压接部41中的一个的特写视图。可移动板9形成致动器组件2的可移动部分的一部分。下面参照固定到可移动板9的压接部41来描述本发明。本发明可以适用于固定到边缘部10的压接部42(边缘部10形成支撑结构4的一部分)。换句话说,关于压接部41和压接部41如何固定到可移动板9所描述的特征也可以适用于压接部42和压接部42如何固定到支撑结构4。通常,本发明的压接部可以附接到可移动部分和支撑结构4中的一个。可移动部分和支撑结构4分别对应于权利要求中的第一部分和第二部分。
如图5所示,SMA致动器组件2可包括中间构件51。如图5所示,压接部41可以经由中间构件51附接到可移动板9。压接部41间接地固定到可移动板9。压接部41附接到中间构件51,中间构件51又附接到可移动板9。中间构件51位于压接部41和可移动板9之间。
如图5所示,中间构件51可以是平面的。中间构件51的平面可以基本上平行于压接部41的主要部分的平面。中间构件51的平面可以基本上平行于中间构件51固定到的可移动板9的表面的平面。
中间构件51可移除地结合到可移动板9。中间构件51可从可移动板9移除而不会损坏可移动板9。
通过使中间构件51可从可移动板9移除而不损坏可移动板9,可以从可移动板9分离附接有SMA线40的有缺陷的压接部41。这允许可移动板9(其可以具有例如附接的或集成的图像传感器6)与另一替换压接组件一起重复使用。这通过减少可移动板9和任何集成部件的破坏来降低制造成本。这样的部件可能具有高价值。例如,图像传感器6可以具有比压接部41、42和附接的SMA线40的压接组件更高的价值。
一旦压接部41、42和附接的SMA线40的压接组件已经附接到可移动板9和支撑结构4,就可以对其进行测试。可以测量诸如行程长度、可移动板9的移动准确度以及在不同方向上的移动之间的串扰水平等参数。如果确定致动器组件2不满足这些参数中的一个或更多个的所需性能水平,则可以从可移动板9移除压接部41。替换压接部41可以附接在它们的位置。
如图5所示,可选地,中间构件51焊接到可移动板9上。填充材料52位于中间构件51和可移除板9之间。例如,可使用表面贴装技术(surface-mount technology)进行焊接。通过将中间构件51焊接到可移动板9,可以在不损坏可移动板9的表面的情况下将中间构件51与可移动板9分离。这允许可移动板9被重复使用。
为了将中间构件51与可移动板9分开,填充材料52可以被加热到例如至少200℃的温度。这样的高温可能会损坏SMA线40。可以废弃带有附接的SMA线40的压接部41。中间构件51可以与压接部41一起废弃。
然后,可将替换中间构件51附接到可移动板9。中间构件51可以焊接到可移除板9。填充材料52可放置在适当位置并加热到至少200℃使得填充材料52流动。填充材料52将中间构件51固定到可移动板9上。
随后,替换压接部41可附接至中间构件51。压接部41附接到中间构件51的与附接到可移动板9的一侧相对的一侧。在图5所示的定向中,压接部41固定到中间构件51的上侧55。中间构件51的下侧56面向可移动部分9。上侧55和下侧56形成中间构件51的主表面。如图5所示,可选地,压接部41经由焊接部53附接到中间构件51。在图5示出了两个焊接部53。焊接部的数量可以是一个、两个或多于两个。可选地,压接部41被激光焊接到中间构件51。
用于将压接部41附接到中间构件51的过程可以在比用于将中间构件51附接到可移动板9的过程更低的温度下执行。在将压接部41附接到中间构件51的过程中,SMA线40暴露于比将中间构件51结合到可移动板9所需的温度更低的温度。这减少了在用于将压接部41相对于可移动板9固定在适当位置的过程中SMA线40被损坏的可能性。
例如,如果加热到大约110℃或更高的温度,SMA线40可能遭受损坏。可选地,用于将压接部41附接至中间构件51的过程在低于110℃的温度下进行。可选地,激光焊接用于形成将压接部41附接到中间构件51的焊接部53。
通过不直接焊接压接部41,SMA线40不会由于执行焊接过程所需的热量而被损坏。
使用激光焊接不是至关重要的。在替代过程中,压接部41经由粘合剂附接到中间构件51。
可移动板9可以电连接到SMA线40。电信号可以穿过填充材料52、中间构件51和压接部41到达SMA线40。电信号可以穿过焊接部53。
可替代地,当使用粘合剂代替焊接部53时,可以提供附加的导电部件以提供从中间构件51到压接部41的电连接。可替代地,可以使用导电粘合剂。
可选地,中间构件51的主体包括诸如钢(特别是不锈钢)的金属。不锈钢具有良好的焊接性能,并因此特别适合于与压接部41焊接在一起。其他导电材料可用于中间构件51。例如,可以使用铜合金。
可选地,中间构件51至少部分地镀有另一导电材料。例如,可以提供金镀层。该镀层可以被配置成改善中间构件51和可移动板9之间的焊接连接。金镀层可使中间构件51更可靠地焊接。可替代地,中间构件51可以镀有诸如锡或银的其他导电材料。
可选地,中间构件51在其上侧55和下侧56上被镀覆。可替代地,中间构件51可以仅在下侧56(即,面向可移动板9的侧)上被镀覆。这允许中间构件51从镀层的改进的焊接性能中受益,而不会让镀层使压接部41更难焊接到中间构件51上。
带有分开区段的压接件
图6是附接到可移动部分9的替代压接部41的平面图。如图6所示,压接部包括安装部分61、线附接部分63和桥接部分62。安装部分61被配置为附接到可移动板9。例如,如图6所示,焊接部53可以形成在安装部分61的区域中。安装部分61用于将压接部41安装到可移动板9上。线附接部分63被配置为保持SMA线40。例如,线连接部分63可以包括压接部41的折叠区段(折叠区段在图5中更清楚地示出)。桥接部分62将安装部分61连接到线附接部分63。
如图6所示,可选地,桥接部分62包括分开区段64。分开区段64是压接部41相对于压接部41的相邻区段机械性较弱的地方。通过提供机械性较弱的分开区段64,可以更容易地在分开区段64处分开压接部41。通过在分开区段64处分开压接部41,安装部分61与线附接部分63分开。
如果确定致动器组件2不满足所需的标准,则可在分开区段64处分开压接部41。可以通过相对于安装部分61机械地移动附接部分63来执行分开。例如,压接部41可以在分开区段64处弯曲,并且重复的机械移动可以在机械性较弱的分开区段64处折断压接部41。
通过分开压接部41,可移动板9可以与替换压接部41一起重复使用。这有助于降低致动器组件2的平均制造成本。
如图6所示,可选地,在分开区段64处提供减少量的材料,使得压接部41在分开区段64处相对于压接部41的相邻区段机械性较弱。例如,如图6所示,可选地,至少一个孔65在分开区段64处形成在桥接部分62中。尽管在图6中仅示出一个孔65,但也可以设置多个孔。分开区段64可以包括穿孔。压接部41可以由金属片形成。当由金属片形成压接部41时,可以容易地包括孔或穿孔。
另外,或者可选地,可以在分开区段64处减小压接部41的厚度,使得其机械性较弱。通过机械地削弱分开区段64,可以更容易地控制压接部41折断的位置。这有助于控制压接部41的保持附接至可移动板9的安装部分61的大小。
图7是在压接部41被分开之后保持固定到可移动板9的安装部分61的平面图。剩余的安装部分61可以具有特性化的毛刺或边沿形状,其指示安装部分61已经与压接部41的其余部分分开。因此,可以从该设备的物理特征确定该设备已经被制造的过程。
作为机械移动的替代方案,压接部41可以通过切割过程分开。例如,可以执行激光切割。
图8是替换压接部41的平面图。如图8所示,替换压接部41包括安装部分61、线附接部分63和桥接部分62。另外,致动器组件2包括与另一压接部的线附接部分63分开的另一压接部41的安装部分61。该设备是用替换压接部41替换有缺陷的压接组件的过程的结果。这有助于降低制造设备的成本,因为可以使用致动器组件2的一部分。
如图8所示,可选地,替换压接部41和另一安装部分61在可移动板9上的同一平面内彼此相邻。替换压接部41的尺寸可以小于图6所示的原始压接部41的尺寸。这允许替换压接部41能够不受另一安装部分61干涉地附接到可移动板9。
如图8所示,可选地,替换压接部41和另一安装部分61中的至少一个包括用于定位替换压接部41的特征。可选地,替换压接部41和另一安装部分61具有面对彼此的互补成形的边沿。例如,剩余的安装部分61包括由于原始压接部41中的孔65的存在而具有凹入形状的边沿。替换压接部41可以包括面向剩余的安装部分61的凹入边沿的互补成形的凸出边沿。这可以通过增加压接部41的接触可移动板9的表面积而不受剩余的安装部分61干涉来帮助增加压接部41在可移动板9上的连接的稳定性。
如图8所示,可选地,替换压接部41和另一安装部分61被配置为彼此啮合。这有助于提高替换压接部41的稳定性。
堆叠的压接件
图9是替换压接部41附接到可移动板9的替代方案的截面图。如图9所示,可选地,替换压接部41经由另一安装部分61附接到可移动板9。剩余的安装部分61位于替换压接部41和可移动板9之间。这允许替换压接部41具有与被分开的原始压接部41相同的尺寸。替换压接部41的设计可以与原始压接部41的设计相同。这可以使制造致动器组件2更容易。
图10是图9所示的替换压接部41的修改版本的截面图。如图10所示,可选地,替换压接部41的桥接部分从安装部分61朝向可移动板9延伸。在图10中所示的示例中,替换压接部41包括折弯部(jog),以与图9中所示的布置相比降低SMA线的高度。在图10所示的布置中,SMA线40的高度可以与当原始(未分开的)压接部41附接到可移动板9时SMA线40的高度基本相同。这意味着SMA线40的位置不受压接部41的替换的影响。
如图10所示,压接部41可以在安装部分61连结桥接部分62的地方弯曲,使得桥接部分62朝向可移动板9弯曲。这在图10中在弯曲部91处示出。如图10所示,可选地,压接部41还在桥接部分62与可移动板9相遇的地方弯曲,使得桥接部分62部分地在与可移动板9上的另一安装部分61相同的平面内延伸。这在第二弯曲部92处示出。第二弯曲部92与第一弯曲部91处于相反的方向。
在图10所示的布置中,桥接部分62包括垂直于可移动板9的表面延伸的垂直区段93和在与可移动板9上的另一安装部分61相同的平面内延伸的平行区段94。通过提供这种折弯部,与仅设置一个弯曲部91相比,可以改进定位SMA线的制造公差。
在替代布置中,仅设置第一弯曲部91,并且取代图10所示的L形的是,替换压接部41具有从安装部分61朝向可移动板9的更简单的对角线延伸。
集成图像传感器
如上所述,可选地,图像传感器6集成到可移动板9中。另外地或可替代地,一个或更多个其他电子装置可以集成到可移动板9中。电子装置可以包括与可移动板9的多个电连接。例如,图像传感器6包括与可移动板9的大量电连接。
电子装置和可移动板9(或者可替代地支撑结构4)之间的大量电连接使得在压接部41、42和SMA线40已经附接之后将图像传感器6附接到可移动板9特别困难。因此,优选在附接压接部41、42和SMA线40之前将传感器6集成到可移动板9中。
图像传感器6相对于移动PCB 9固定。图像传感器6电连接到移动PCB9。例如,线结合可以提供图像传感器6和移动PCB9之间的电连接。
支承装置
在图示的实施例中,致动器组件2还包括支承装置110。支承装置110将图像传感器组件12支撑在支撑结构4上,以形成间隙104。支承装置110允许图像传感器组件12相对于支撑结构4移动,例如以允许图像传感器组件12相对于支撑结构4在横向于光敏区域7的任何方向上移动的方式和/或以允许图像传感器组件12围绕垂直于光敏区域7的任何轴线旋转的方式。
如图2所示,支承装置可包括滚动支承件110。滚动支承件110例如可以是滚珠支承件或滚子支承件。滚动支承件110包括滚动元件,例如滚珠或滚子。滚动元件可以是球形的,或者通常可以是任何具有抵靠图像传感器组件12和支撑结构4的弯曲表面的旋转元件,并且能够在操作中前后滚动和四处滚动。
滚动元件设置在图像传感器组件12和支撑结构4之间。因此,图像传感器组件12由滚动元件支撑在支撑结构4上。滚动支承件110可以包括多个滚动元件,例如三个滚动元件。尽管通常可以提供任何数量的滚动元件,但优选地提供至少三个滚动元件以防止图像传感器组件12和支撑结构4的相对倾斜。三个滚动元件足以支撑图像传感器组件12而不会倾斜,并且提供三个滚动元件具有减少在共同平面中维持与每个滚动元件点接触所需要的公差的优点。
在图2的实施例中,滚动支承件110与间隙104设置在图像传感器组件12的同一侧,如图2所示。这可以确保即使当大的力作用在图像传感器组件12上时,间隙104的高度也保持恒定。因此,在垂直于光敏区域7的方向上,滚动元件的范围可以大于间隙104的范围,例如通过图像传感器组件12的下侧中的用于容纳滚动元件的凹槽。与滚动元件布置在间隙104中的情况相比,这可以允许间隙104的高度降低。
在替代实施例中,滚动支承件110设置在图像传感器组件12的与间隙104相对的一侧。滚动支承件110设置在图像传感器组件12的与光敏区域7相同的一侧,特别是横向于光敏区域7。
可替代地或另外地,支承装置110可以包括挠曲装置。挠曲装置设置在图像传感器组件12和支撑结构4之间。因此,图像传感器组件12通过挠曲装置支撑在支撑结构4上。
可替代地或另外地,支承装置110可以包括滑动支承件,诸如结构化滑动支承件。滑动支承件包括在图像传感器组件12和支撑结构4中的每一个上的支承表面。滑动支承件可以包括钢、聚合物或陶瓷。支承表面可以各自是平面的。支承表面相互支承,以便将图像传感器组件12支撑在支撑结构4上,允许相对滑动运动。因此,滑动支承件允许图像传感器组件12相对于支撑结构4移动,特别是以允许图像传感器组件12相对于支撑结构4在横向于光敏区域7的任何方向上移动或旋转的所述方式。
另外地或可替代地,电互连器251可以充当支承装置110。例如,电互连器251的挠曲件可配置成将图像传感器组件12支撑在支撑结构4上,以形成间隙104。挠曲件被配置成允许图像传感器组件12相对于支撑结构4移动。图像传感器组件12可以使用电互连件51悬挂在空间中。电互连件51包括挠曲型装置,该挠曲型装置被配置为当移动PCB 9向静态PCB10移动时将移动PCB 9保持在平面内。这可以帮助减少摩擦并减少形成致动器组件2所需的部分的数量。
支承装置110被配置成将图像传感器6约束在平面内。这可以有助于改进或维持由图像传感器6获得的图像的质量。
可选地,致动器组件2包括偏压装置,用于提供作用在图像传感器组件12上的力,以确保图像传感器组件12保持与支承表面接合,优选地在所有姿态下。如图2所示,可选地,致动器组件2包括磁体装置,该磁体装置被配置为施加使图像传感器组件12偏压支承装置110的力。例如,图像传感器组件12可以包括至少一个磁体22。磁体22可以相对于移动PCB9固定。磁体的数量可以是一个、两个、三个、四个或多于四个。例如,磁体22可以嵌入到移动PCB 9中,或者可以附接到移动PCB 9的一侧。
可选地,支撑结构4包括含铁材料。例如,支撑板5可以由诸如钢的含铁材料形成。磁体22和支撑板5之间的磁吸引使图像传感器组件12偏压支承装置110。
致动器装置
图像传感器组件12相对于支撑结构4的移动由如下布置的致动器装置驱动,并且在图4中最容易看到。在致动器装置包括多个SMA线40的情况下实现了特别的优点,因为与其他形式的致动器相比,SMA提供了高致动力。这可有助于图像传感器组件12相对于支撑结构4的精确定位。然而,通常,致动器装置可包括除SMA线40之外的致动器部件。
图4所示的致动器装置由连接在支撑结构4和图像传感器组件12之间的总共四根SMA线40形成。为了附接SMA线40,图像传感器组件12包括固定到移动PCB 9的压接部41,并且支撑结构4包括固定到静态PCB10的压接部42。压接部41和压接部42压接四根SMA线40,以便将它们连接到支撑结构4和图像传感器组件12。
SMA线40如下布置,使得它们能够在选择性驱动时使图像传感器组件12相对于支撑结构4在横向于光敏区域7的任何方向上移动,并且还能够使图像传感器组件12绕正交于光敏区域7的轴线旋转。
在使用中,SMA线40中的每一根被保持张紧,从而在支撑结构4和图像传感器组件12之间施加力。
SMA线40可以垂直于光学轴线O使得施加到图像传感器组件12的力横向于光敏区域7。可替代地,SMA线40可以相对于光敏区域7以小角度倾斜,使得施加到图像传感器组件12的力包括横向于光敏区域7的分量和沿光学轴线O的分量,沿着光学轴线O的分量充当使图像传感器组件12偏压支承装置110的偏压力。因此,SMA线40可以充当偏压装置。偏压装置可以包括致动器部件,用于施加偏压力,该偏压力将图像传感器组件12朝向支承装置110偏压。
现在将描述SMA线40的总体布置,其类似于WO-2014/083318中所描述的布置。
SMA材料具有加热时发生固态相变的特性,这种固态相变导致SMA材料收缩。在低温下,SMA材料进入马氏体相。在高温下,SMA进入奥氏体相,这引发变形,导致SMA材料收缩。由于SMA晶体结构中转变温度的统计分布,相变在一定温度范围内发生。因此,SMA线40的加热导致它们的长度减小。
SMA线40可以由任何合适的SMA材料(例如镍钛诺或另一种钛合金SMA材料)制作。有利地,SMA线40的材料组成和预处理被选择为在正常操作期间在高于预期环境温度并且尽可能宽的温度范围内提供相变,以最大化位置控制程度。
在加热SMA线40中的一个时,其中的应力增加并且其收缩,引起图像传感器组件12的移动。随着SMA温度的增加,在发生SMA材料从马氏体相向奥氏体相转变的温度范围内,会出现一系列的运动。相反,在冷却SMA线40中的一个以使其中的应力降低时,该SMA线40在相对的SMA线40的力下扩张。这使得图像传感器组件12在相反的方向上移动。
图像传感器组件12轴向定位在支撑结构4的静态PCB 10的孔11内。四根SMA线40布置在图像传感器组件12的四侧上。SMA线40可以具有相同的长度,并且可以具有旋转对称的布置。
从轴向上看,第一对SMA线40平行于横向于光敏区域7的第一轴线(在图4中为竖直轴线)延伸。然而,第一对SMA线40相对地连接到支撑结构4和图像传感器组件12,使得它们沿着第一轴线在相反的方向上(在图4中竖直地向上和向下)施加力。在每根SMA线40中的张力相等的情况下,由第一对SMA线40施加的力平衡。这意味着第一对SMA线40将第一扭矩(在图4中为逆时针方向)施加到图像传感器组件12。
从轴向上看,第二对SMA线40平行于横向于光敏区域7的第二轴线(在图4中为水平轴线)延伸。然而,第二对SMA线40相对地连接到支撑结构4和图像传感器组件12,使得它们沿着第二轴线在相反的方向上(在图4中水平地向左和向右)施加力。在每一根SMA线40中的张力相等的情况下,由第二对SMA线40施加的力平衡。这意味着第二对SMA线40向图像传感器组件12施加第二扭矩(在图3中为顺时针方向),该第二扭矩被布置成与第一扭矩相反。因此,在每根SMA线40中的张力相同的情况下,第一扭矩和第二扭矩平衡。
结果是,SMA线40可被选择性地驱动,以在相对于光学轴线O横向的任何方向上移动图像传感器组件12,并绕平行于光学轴线O的轴线旋转图像传感器组件12。即:
图像传感器组件12沿第一轴线在任一方向上的移动可通过驱动第一对SMA线40以区别地收缩来实现,这是由于它们在相反方向上施加力;
图像传感器组件12沿第二轴线在任一方向上的移动可通过驱动第二对SMA线40以区别地收缩来实现,这是由于它们在相反方向上施加力;以及
图像传感器组件12的旋转可以通过驱动第一对SMA线40和第二对SMA线40以区别地收缩来实现,这是由于第一扭矩和第二扭矩处于相反的方向。
移动和旋转的范围的大小取决于SMA线40在其正常工作参数内的几何形状和收缩范围。
SMA线40的这种特殊布置是有利的,因为它可以用最少数量的SMA线驱动期望的横向运动和旋转。然而,可以应用SMA线40的其他布置。为了提供三个运动度(两个横向运动度和一个旋转运动度),则提供最少四根SMA线40。其它布置可以应用不同数量的SMA线40。对于横向运动,但是不旋转,可以提供更少的SMA线40。具有多于四根SMA线40的布置也是可能的,并且在允许除了运动之外控制附加参数(例如SMA线40中的应力程度)方面具有优点。
通过选择性地改变SMA线40的温度来控制图像传感器组件12相对于支撑结构4的横向位置和定向。通过使选择性驱动信号穿过SMA线40以提供电阻加热来实现SMA线40的这种驱动。通过驱动信号的电流直接提供加热。通过减小或停止驱动信号的电流以允许SMA线40通过与其周围环境的传导、对流和辐射冷却来提供冷却。
摄像机设备
摄像机设备1包括透镜组件20,该透镜组件20通过安装到支撑结构4(例如安装到至少部分由静态PCB 10形成的边缘部)而与致动器组件2组装。
透镜组件20包括圆柱形主体形式的透镜托架21,其安装到支撑结构4的边缘部。透镜托架支撑沿光学轴线O布置的至少一个透镜。通常,可以提供一个或更多个透镜中的任意数量。在不限于本发明的情况下,在该示例中,摄像机设备1是微型摄像机,其中至少一个透镜(即,如果提供多个透镜,则每个透镜)通常具有至多10mm或15mm或20mm的直径。透镜组件20的至少一个透镜被布置成将图像聚焦到图像传感器上。
在该示例中,至少一个透镜以至少一个透镜相对于透镜托架21沿光学轴线O可移动的方式支撑在透镜托架21上,例如以提供聚焦或变焦,然而这不是必需的。具体地说,至少一个透镜被固定到相对于透镜托架21可沿光学轴线O移动的透镜保持器23。在存在多个透镜的情况下,透镜中的任意或全部透镜可以固定到透镜保持器23和/或一个或更多个透镜可以固定到透镜托架21并且因此不能相对于透镜托架21沿光学轴线O移动。
设置在透镜托架21和透镜保持器23之间的轴向致动器装置24被布置成驱动透镜保持器23和透镜11沿光学轴线O相对于透镜托架21移动。轴向致动器装置24可以是任何合适的类型,例如是音圈电机(VCM)或SMA线的装置,如通过引用并入本文的WO-2019/243849中所描述的。
另外,摄像机设备1可以包括固定到支撑结构4并从支撑结构4向前突出以包住和保护摄像机设备1的其他部件的外壳(can)15。
如上所述,在操作中,SMA线40被选择性地驱动以在任何方向上横向地移动图像传感器组件12和/或绕平行于光学轴线O的轴线旋转图像传感器组件12。这用于提供OIS,补偿例如由手抖引起的摄像机设备1的图像移动。
图像传感器6相对于支撑结构4并且因此也相对于透镜组件20的相对移动可用于稳定图像,防止摄像机设备1的倾斜(即围绕横向于光敏区域7延伸的轴线旋转)。此外,图像传感器6的旋转可用于稳定图像,防止摄像机设备1围绕光学轴线O旋转。
SMA线40由在IC芯片30中实施的控制电路驱动。特别地,控制电路为每个SMA线40产生驱动信号,并将驱动信号提供给SMA线40。
控制电路30接收充当振动传感器的陀螺仪传感器31的输出信号。陀螺仪传感器31检测摄像机设备1正在经历的振动,并且其输出信号表示这些振动,具体为摄像机透镜元件20在三维中的角速度。更通常地,可以使用更多数量的陀螺仪或其他类型的振动传感器。
驱动信号由控制电路响应于陀螺仪传感器31的输出信号而产生,从而驱动图像传感器组件12的移动,以稳定由摄像机透镜元件20在图像传感器上聚焦的图像,从而提供OIS。可以使用电阻反馈控制技术产生驱动信号,例如在WO-2013/175197、WO-2014/076463、WO2012/066285、WO-2012/020212、WO-2011/104518、WO-2012/038703、WO2010/089529或WO-2010/029316中的任何一个中所公开的,这些文件中的每一个通过引用并入本文。
摄像机设备1可以包含到便携式电子装置中,诸如移动电话或平板电脑。
变型
将理解,可以存在上述实施例的许多其他变型。图中所示的不同布置的特征可以相互组合。例如,支承装置110可以包括上述支承装置110的任何组合。滚柱支承件110可以包括在垂直于光敏区域7的方向上位于图像传感器组件12的两侧上的滚动元件。支承装置110可包括一个或更多个滚动支承件和一个或更多个挠曲装置。
SMA线
上述SMA致动器组件包括SMA线。术语“形状记忆合金(SMA)线”可以指任何包含SMA的元件。SMA线可以具有适合于本文所述目的的任何形状。所述SMA线可以是长形的,并且可以具有圆形(round)截面或任何其他形状的截面。截面可以沿SMA线的长度变化。可能的是,SMA线的长度(无论定义如何)也可以与其其他尺寸中的一个或更多个相似。SMA线可以是柔顺的,或者换句话说,是柔性的。在一些示例中,当在两个元件之间以直线连接时,SMA线只能施加将两个元件推到一起的拉力。在其他示例中,SMA线可以围绕元件弯曲,并且当SMA线在张力下趋于伸直时,可以向元件施加力。SMA线可以是梁状的或刚性的,并且能够对元件施加不同的(例如非拉伸)力。SMA线可以包括也可以不包括非SMA的一种或更多种材料和/或一个或更多个部件。例如,SMA线可以包括SMA芯和非SMA材料的涂层。除非上下文另有要求,术语“SMA线”可指充当单个致动元件的SMA线的任何配置,例如,该致动元件可被单独控制以在元件上产生力。例如,SMA线可以包括机械地并联和/或串联布置的两个或更多个SMA线部分。在一些布置中,SMA线可以是较大段SMA线的一部分。这种较大段的SMA线可以包括单独可控的两个或更多个部分,从而形成两根或更多根SMA线。
- 用于飞行器的控制表面的致动器组件、包含该致动器组件的飞行器及使用它们的方法
- 飞行器致动器组件、飞行器致动器、保持装置及一套部件
- 冲洗致动器组件
- 包括压电致动器或电致伸缩致动器的致动器组件
- 用于车辆安全系统的烟火致动器、致动器组件、包括此致动器的车辆安全系统以及致动方法