仿真机器人手腕柔性结构
文献发布时间:2023-06-19 19:20:08
技术领域
本发明涉及仿真机器人技术领域,特指一种仿真机器人手腕柔性结构。
背景技术
在机器人领域,仿真机器人手臂的手腕结构多为刚性连接,电机在驱动手腕转动时,受到的初始运动力矩过大,导致电机电流过大,从而使得电机寿命较短。另外,刚性连接还存在电机启动时,手腕的转动会发生卡顿的现象,使得仿真效果不佳。
发明内容
本发明的目的在于克服现有技术的缺陷,提供一种仿真机器人手腕柔性结构,解决现有的手腕采用刚性连接存在电机寿命较短以及手腕转动会发生卡顿而影响仿真效果的问题。
实现上述目的的技术方案是:
本发明提供了一种仿真机器人手腕柔性结构,包括:
安装座,具有相对设置的前端和后端,所述后端处形成有手臂连接端;
可转动的设于所述安装座前端处的手掌连接件;
一端可转动的连接在所述手掌连接件上的柔性连接机构,所述柔性连接机构与所述手掌连接件的连接处同所述手掌连接件与所述安装座的连接处相错开;以及
与所述柔性连接机构的另一端连接并设于所述安装座后端处的驱动件,所述驱动件可伸缩调节,在所述驱动件进行伸缩调节时,所述柔性连接机构可发生弹性形变,所述柔性连接机构发生弹性形变后将所述驱动件伸缩调节产生作用力传递给所述手掌连接件以使得所述手掌连接件进行转动。
本发明采用柔性连接机构连接驱动件和手掌连接件,在驱动件驱动该手掌连接件进行转动时,柔性连接机构会发生弹性形变,此时驱动件的初始作用力主要用于抵消该柔性连接机构的弹性变形力,该驱动件可使用较小的力矩完成动作,电机瞬时电流较小,从而增加了驱动件的寿命,解决了刚性连接存在的电机寿命短的问题。另外,柔性连接机构的设置使得手腕的初始运动为软启动,避免了手腕转动发生卡顿的现象,使得手腕运动的仿真度更高。
本发明仿真机器人手腕柔性结构的进一步改进在于,所述柔性连接机构包括连接筒、置于所述连接筒内的连接杆、置于所述连接筒内并支撑在所述连接杆的头部与所述连接筒底部之间的第一弹簧、置于所述连接筒内并位于所述连接杆的头部之上的第二弹簧以及连接在所述连接筒顶部并与所述第二弹簧相接触的转接件;
所述连接杆的底部自所述连接筒的底部伸出并与所述驱动件连接,在所述驱动件进行伸缩调节时可带着所述连接杆在所述连接筒内进行移动,进而压缩对应的第二弹簧和第一弹簧;
所述转接件与所述手掌连接件可转动的连接。
本发明仿真机器人手腕柔性结构的进一步改进在于,所述连接杆的头部尺寸与所述连接筒的内径相适配。
本发明仿真机器人手腕柔性结构的进一步改进在于,所述连接筒的底部开口的尺寸小于所述连接杆的头部的尺寸。
本发明仿真机器人手腕柔性结构的进一步改进在于,所述转接件通过鱼眼关节轴承与所述手掌连接件可转动的连接。
本发明仿真机器人手腕柔性结构的进一步改进在于,所述转接件包括与所述连接筒螺纹连接的转接头以及与所述转接头螺纹连接的转接杆,所述转接杆的另一端与所述手掌连接件可转动的连接。
本发明仿真机器人手腕柔性结构的进一步改进在于,所述连接杆与所述驱动件螺纹连接。
本发明仿真机器人手腕柔性结构的进一步改进在于,所述手掌连接件通过转轴可转动的安装在所述安装座的前端处。
本发明仿真机器人手腕柔性结构的进一步改进在于,所述安装座包括条形板、设于所述条形板一端的安装板以及固定连接在所述安装板上的连接柱;
所述安装板垂直连接在所述条形板上;
所述连接柱设于所述安装板上远离所述条形板的一侧;
所述驱动件设于所安装板上。
本发明仿真机器人手腕柔性结构的进一步改进在于,所述驱动件为伺服推杆电机。
附图说明
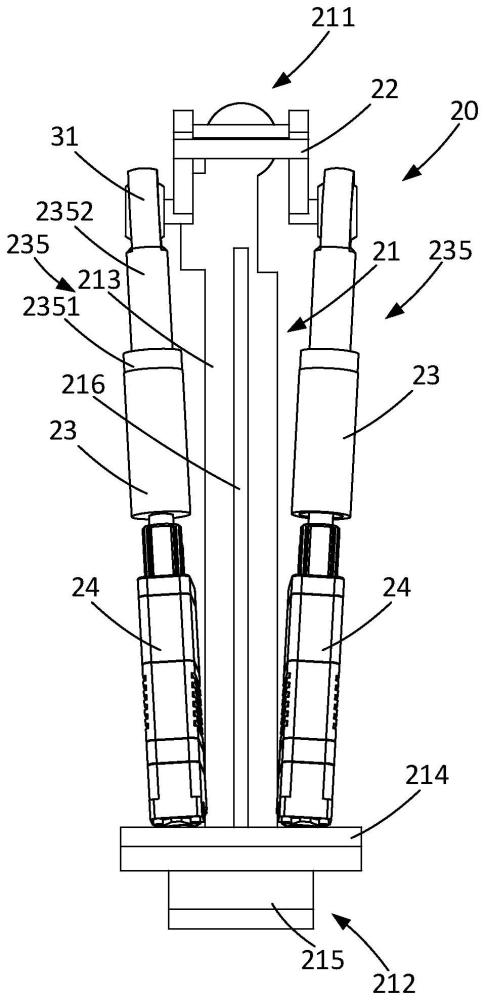
图1为本发明仿真机器人手腕柔性结构的正视图。
图2为本发明仿真机器人手腕柔性结构的侧视图。
图3为本发明仿真机器人手腕柔性结构中柔性连接机构的结构示意图。
图4为图3中A-A剖视图。
图5为本发明仿真机器人手腕柔性结构的连接筒的剖视图。
图6为本发明仿真机器人手腕柔性结构的连接杆的结构示意图。
图7为本发明仿真机器人手腕柔性结构的转接头的剖视图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明。
参阅图1,本发明提供了一种仿真机器人手腕柔性结构,采用柔性连接方式,将仿真机器人手腕运动方式的初始刚性启动改为柔性启动,也就是软启动,使得手腕运动仿真度更高,解决仿真机器人领域手腕刚性连接结构受冲击力较大的问题,还解决仿真机器人手腕刚性连接初始运动力矩多大造成电机电流过大从而使得电机寿命较短的问题。下面结合附图对本发明仿真机器人手腕柔性结构进行说明。
参阅图1,显示了本发明仿真机器人手腕柔性结构的正视图。参阅图2,显示了本发明仿真机器人手腕柔性结构的侧视图。下面结合图1和图2,对本发明仿真机器人手腕柔性结构进行说明。
如图1和图2所示,本发明的仿真机器人手腕柔性结构20包括安装座21、手掌连接件22、柔性连接机构23以及驱动件24,其中的安装座21具有相对设置的前端211和后端212,在后端212处形成有手臂连接端,用于与仿真机器人的手臂连接,前端211用于与仿真机器人的手掌连接;手掌连接件22可转动的设于安装座21的前端211处,该手掌连接件22用于与仿真机器人的手掌连接;柔性连接机构23一端可转动的连接在手掌连接件22上,另一端与驱动件24连接,该柔性连接机构23与手掌连接件22的连接处同手掌连接件22与安装座21的连接处相错开,如此该柔性连接机构23推拉该手掌连接件22,能够驱动手掌连接件22相对于安装座21进行转动;驱动件24设于安装座21的后段212处,该驱动件24可伸缩调节,在该驱动件24进行伸缩调节时,柔性连接机构23可发生弹性形变,在该柔性连接机构23发生弹性形变后将驱动件24伸缩调节产生的作用力传递给手掌连接件22以使得手掌连接件22进行转动。
具体地,在驱动件24向前伸出时,该驱动件24推动柔性连接机构23,该柔性连接机构23发生弹性形变,在柔性连接机构23形变到极限位置时,将驱动件24的向前推力传递给手掌连接件22,使得手掌连接件22绕着与安装座21的连接处进行顺时针的转动;在驱动件向后缩回时,该驱动件24拉动柔性连接机构23,该柔性连接机构23发生弹性形变,在该柔性连接机构23形变到极限位置时,将驱动件24的向后拉力传递给手掌连接件22,使得该手掌连接件22绕着与安装座21的连接处进行逆时针的转动。由于驱动件在推动或拉动的开始,柔性连接机构会发生弹性形变,使得驱动件24受到的初始力矩较小,该驱动件的运动属于缓启动的方式,驱动件的瞬时电流也较小,从而增加了驱动件的使用寿命。且由于柔性连接机构的弹性变形,使得手腕的运动不会发生卡顿的现象,让手腕的运动仿真度更高。
在本发明的一种具体实施方式中,如图3和图4所示,柔性连接机构23包括连接筒231、置于该连接筒231内的连接杆232、置于该连接筒231内并支撑在连接杆232的头部2321与连接筒231底部之间的第一弹簧233、置于该连接筒231内并位于连接杆232的头部2321之上的第二弹簧234以及连接在连接筒231顶部并与第二弹簧234相接触的转接件235;结合图2所示,其中连接杆232的底部自连接筒231的底部伸出并与驱动件24连接,在驱动件24进行伸缩调节时可带着连接杆232在连接筒231内进行移动,进而压缩对应的第二弹簧234和第一弹簧233;转接件235与手掌连接件22可转动的连接。
具体地,驱动件24可推动或拉动连接杆232,让连接杆232在连接筒231内进行上下运动,在连接杆232向上运动时,该连接杆232压缩第二弹簧234,在连接杆232向下运动时,该连接杆232压缩第一弹簧233。驱动件24的初始推力或拉力主要用于抵消弹簧的弹力,根据弹簧弹力的计算公式F=KX可知,其中F为弹力,K为弹力系数,X为弹簧行程,初始弹簧力较小,如此驱动件受到的初始力矩也就较小,避免了驱动件受到较大的初始力矩而影响使用寿命的现象发生。在第一弹簧233和第二弹簧234被压缩到极限时,连接筒231可将驱动件的拉力或推力经过转接件235传递给手掌连接件22,以驱动该手掌连接件22进行转动。
进一步地,连接杆232的头部2321与第一弹簧233和第二弹簧234的对应端部连接,在连接杆232向上运动时,该连接杆232会压缩第二弹簧234,同时也会拉伸第一弹簧233;在连接杆向下运动时,该连接杆232会压缩第一弹簧233,同时也会拉伸第二弹簧234。如此驱动件的推动或拉动相当于在做加速运动,实现了驱动件的缓启动或软启动。
再进一步地,如图4至图6所示,连接杆232的头部2321的尺寸与连接筒231的内径相适配。
又进一步地,连接筒231的底部开口2312的尺寸小于连接杆232的头部2321的尺寸。
连接筒231的顶部开口的尺寸大于连接杆232的头部2321的尺寸,如此该连接杆232可从连接筒231的顶部开口处插入到连接筒231内。
较佳地,在连接杆232的底部设有螺纹连接段2322,该螺纹连接段2322与驱动件24螺纹连接。
结合图2所示,又佳地,该驱动件24为伺服推杆电机,该伺服推杆电机的推杆上设有与螺纹连接段2322相匹配的螺纹,该推杆与螺纹连接段2322螺接。该伺服推杆电机可驱动推杆做直线运动。
在另一较佳实施方式中,驱动件24为气缸。该气缸的气缸杆与螺纹连接段2322螺接,气缸可驱动气缸杆做直线运动。
进一步地,如图3至图7所示,转接件235包括与连接筒231螺纹连接的转接头2351,该转接头2351的截面呈倒T形,转接筒231在顶部开口处设有内螺纹2311,转接头2351的底部螺纹连接在该转接筒231的内螺纹2311上,该转接头2351的顶部位于连接筒231的外部。
结合图1和图2所示,转接件235还包括与转接头2351螺纹连接的转接杆2352,该转接杆2352的另一端与手掌连接件22可转动的连接。
较佳地,该转接件235的转接杆2352通过鱼眼关节轴承31与手掌连接件22可转动的连接。鱼眼关节轴承31与转接杆2352螺接连接。
在本发明的一种具体实施方式中,手掌连接件22通过转轴可转动的安装在安装座21的前端处。
在本发明的一种具体实施方式中,柔性连接机构23与驱动件24设有两个,位于手掌连接件22的两侧。
较佳地,如图1和图2所示,手掌连接件22的两侧设有装配件,该装配件包括一环状板以及连接在该环状板上的第一装配杆221和第二装配杆222,该第一装配杆221和第二装配杆222呈一定夹角设置,该夹角大于等于30°小于90°。鱼眼关节轴承与第二装配杆221连接,环状板与安装座21上可转动设置的转轴连接,鱼眼关节轴承可将驱动件产生的推力或拉力传递给第二装配杆221,进而由第二装配杆221驱动转轴进行转动。
在本发明的一种具体实施方式中,如图1和图2所述,安装座21包括条形板213、设于条形板213一端的安装板214以及固定连接在安装板214上的连接柱215;安装板214垂直连接在条形板213上;连接柱215设于安装板214上远离条形板211的一侧;驱动件24设于所安装板214上。其中连接柱215用于连接仿真机器人的手臂。
为提高条形板213的结构强度,在条形板213上设有加强板216,该加强板216垂直连接在条形板213上,且该加强板216的端部与安装板214也固定连接。
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
- 柔性手腕结构、仿生手结构及机器人
- 柔性手腕结构、仿生手结构及机器人