一种智能网联车辆自适应汇入车辆队列控制方法
文献发布时间:2024-01-17 01:28:27
技术领域
本发明属于自动驾驶技术领域,具体涉及一种智能网联车辆自适应汇入车辆队列控制方法。
背景技术
随着智能网联车辆协同编队的发展,现有研究的重点正在从如何维持固定队列的稳定性向着如何保证车辆安全动态加入和离开队列发展。
现有研究已经提出了一些车辆汇入车队的控制方法;中国发明专利申请号CN202111180496.1,名称为“一种车队的控制方法、加入方法、控制装置及加入装置”中提出了一种车队加入方法,该方法通过车队的行驶信息,确定车队可以再接受新的车辆加入后,接受目标车辆加入车队空余位置,跟随车队自动驾驶。但是,该方法没有考虑加入车辆的加入位置,而是直接加入车队空余位置。中国发明专利申请号CN202211502180.4,名称为“车辆加入车队的方法、装置和存储介质”中提出了一种车辆加入车队的方法,该方法基于汇入车辆和车队的距离信息确定汇入车辆在车辆队列中的目标位置,基于目标位置信息控制车辆加入车队,但是该方法并没有考虑汇入车辆的速度和加速度的影响。
然而,当车辆队列和汇入车辆速度相差过大,汇入近距离位置可能会导致加速度突变和更长的汇入操作时间。因此,需要综合考虑队列车辆和汇入车辆的距离、速度和加速度差异,实现车辆自适应选择最优汇入位置。
发明内容
针对于上述现有技术的不足,本发明的目的在于提供一种智能网联车辆自适应汇入车辆队列控制方法,其充分考虑车辆队列和汇入车辆的速度、位置关系,道路速度限制以及车辆舒适性要求,对所有候选汇入位置进行评估,以实现汇入车辆自适应选择最优汇入位置,提高汇入效率。
为达到上述目的,本发明采用的技术方案如下:
本发明的一种智能网联车辆自适应汇入车辆队列控制方法,步骤如下:
步骤1:获取汇入车辆的初始速度V
步骤2:获取道路交通管理信息,包括最高限速V
步骤3:计算汇入车辆当前位置与所有候选汇入位置之间的距离dis,即汇入距离;
步骤4:根据步骤3中的汇入距离和步骤2中的速度、加速度限制条件,计算每个汇入位置所需的汇入时间;
步骤5:考虑汇入时间和汇入距离,对每一个汇入位置进行评估,评估得分越低代表汇入时间越短,汇入距离越近,汇入位置更优,从而实现车辆自适应选择最优汇入位置。
进一步地,所述步骤1具体包括:利用V2I技术将车队车辆和汇入车辆的速度及位置信息发送至路侧单元并存储。
进一步地,所述步骤2具体包括:利用V2I技术将道路交通管理信息发送至路侧单元并存储。
其中,所述步骤2中限制汇入车辆的最大加速度和最大减速度用于考虑车辆汇入过程中的舒适性;限制车辆的最低车速用于减小车辆汇入过程对车队车辆的影响,车辆在道路中缓慢行驶甚至停车时会严重阻碍交通。
进一步地,所述步骤3具体包括:
步骤31:求解候选汇入位置集合如下:
式中,s
步骤32:计算汇入车辆与候选汇入位置的距离:
dis
式中,x
进一步地,所述步骤4中计算汇入时间时,设定车队车辆速度保持不变,|a
步骤41:当V
步骤42:当V
步骤43:当V
步骤44:当V
步骤45:当V
步骤46:当V
步骤47:当V
进一步地,所述步骤5中使用的评估函数如下:
score=w
式中,score为评估得分;w
本发明的有益效果:
本发明考虑车辆队列和汇入车辆的速度、位置关系,道路速度限制以及车辆舒适性要求,求解车辆汇入所有候选汇入位置的汇入时间,综合汇入距离和汇入时间对候选汇入位置进行评估,实现汇入车辆自适应选择最优汇入位置,提高车辆汇入效率。
附图说明
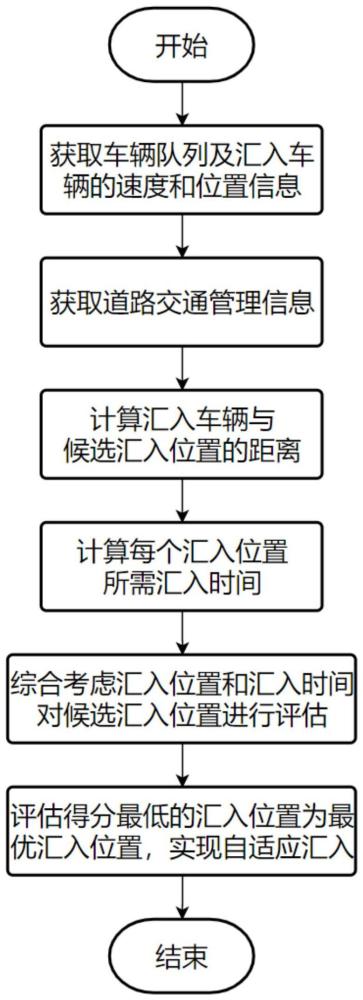
图1为本发明方法的流程图。
图2为汇入时间计算中汇入车辆和车队车辆速度分布示意图。
具体实施方式
为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
参照图1所示,本发明的一种智能网联车辆自适应汇入车辆队列控制方法,步骤如下:
步骤1:获取汇入车辆的初始速度V
利用V2I技术将车队车辆和汇入车辆的速度及位置信息发送至路侧单元并存储。
步骤2:获取道路交通管理信息,包括最高限速V
利用V2I技术将道路交通管理信息发送至路侧单元并存储。
其中,所述步骤2中限制汇入车辆的最大加速度和最大减速度用于考虑车辆汇入过程中的舒适性;限制车辆的最低车速用于减小车辆汇入过程对车队车辆的影响,车辆在道路中缓慢行驶甚至停车时会严重阻碍交通。
步骤3:计算汇入车辆当前位置与所有候选汇入位置之间的距离dis,即汇入距离;具体包括:
步骤31:求解候选汇入位置集合如下:
式中,s
步骤32:计算汇入车辆与候选汇入位置的距离:
dis
式中,x
步骤4:根据步骤3中的汇入距离和步骤2中的速度、加速度限制条件,计算每个汇入位置所需的汇入时间;
所述步骤4中计算汇入时间时,参照图2所示,设定车队车辆速度V
步骤41:当V
步骤42:当V
步骤43:当V
步骤44:当V
步骤45:当V
步骤46:当V
步骤47:当V
步骤5:考虑汇入时间和汇入距离,对每一个汇入位置进行评估,评估得分越低代表汇入时间越短,汇入距离越近,汇入位置更优,从而实现车辆自适应选择最优汇入位置;
所述步骤5中使用的评估函数如下:
score=w
式中,score为评估得分;w
本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。
- 一种智能网联车辆自组织汇入队列控制方法
- 一种车辆汇入智能网联车队的控制方法及系统