一种肥箱余量监测系统与监测方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及智能农机领域、无人施肥机领域、颗粒化肥储运设备领域,特别涉及一种肥箱余量监测系统与监测方法。
背景技术
化肥的使用对提高农业生产的产量具有重大贡献。目前,中国化肥的使用逐年增长,25年间增长了一倍。虽然化肥的施用量大,但是化肥的利用率却不到40%,未被使用的化肥通过生态循环进入土壤、水体和大气,对环境造成污染的同时也导致了经济损失。
变量施肥技术可以减少化肥的施用量,降低化肥对环境的影响。而施肥质量是影响农作物产量的重要因素之一。对于施肥质量的监测是目前施肥机研究的主要方向之一。在变量施肥过程中,由于化肥箱中存储的化肥余量不足且没有及时补充,或者化肥流动性差难以流动至排肥口,导致施肥量远低于目标施肥量,进而造成农作物减产。为了防止由于化肥箱中存储的化肥余量不足以及没有及时补充,或者化肥流动性差难以流动至排肥口而导致施肥质量难以保证,较为常用的是人工监测的方法。然而,人工监测方法往往并不精准,且需要耗费大量的人力物力,导致施肥成本上升。
发明内容
针对上述问题,本发明的目的是提供一种肥箱余量监测系统与监测方法,用于对化肥箱中化肥余量进行有效监测,可以解决由于化肥箱中化肥余量不足导致的农作物减产问题。
为实现上述目的,本发明采取以下技术方案:
本发明的第一个方面,是提供一种肥箱余量监测系统,其包括施肥机,所述施肥机包括肥箱、排肥机构以及驾驶室,所述排肥机构设置在所述肥箱侧壁的出肥口处;其还包括:电控系统和主控设备;所述电控系统包括激光测距传感器阵列、开度检测传感器、转速检测传感器、5V供电电源以及控制器;所述激光测距传感器阵列设置在肥箱顶部内侧,用于对肥箱内化肥距离肥箱顶部内侧的距离信息进行实时监测并发送到所述控制器;所述开度检测传感器设置在所述排肥机构中,用于对所述排肥机构中排肥轴的开度进行检测,并发送到所述控制器;所述转速检测传感器设置在所述排肥机构中,用于对所述排肥机构中排肥轴的转速进行检测并发送到所述控制器;所述控制器和5V供电电源均设置在所述肥箱侧边上,且所述控制器用于对接收到的所有信息进行处理并发送到所述主控设备,所述5V供电电源用于为各传感器和控制器供电;所述主控设备设置在驾驶室中,用于根据接收到的信息对肥箱余量进行监测,并根据肥箱余量以及施肥速率对施肥时长进行预测以及排空预警。
进一步地,所述激光测距传感器阵列包括若干激光测距传感器,且各所述激光测距传感器通过设置在所述肥箱顶部内侧同一水平面上的若干固定导轨设置在所述肥箱顶部,构成传感器平面点阵。
进一步地,所述控制器包括第一~第四子控制器,各所述第一~第四子控制器分别与所述激光测距传感器阵列中每一列中的激光测距传感器相连,用于接收各列中激光测距传感器采集的距离信息,经内置的A/D转换模块进行模数转换后,计算得到实时的距离信息;所述第二子控制器用于接收开度检测传感器采集的位移量变化信息,经内置的A/D转换模块进行模数转换后,得到实时的位移信息;所述第三子控制器用于接收转速传感器采集的转速信息,经内置的A/D转换模块进行模数转换后,得到实时的速度值。
进一步地,所述第一~第四子控制器均采用Arduino控制器。
进一步地,主控设备内设置有主控制器,该主控制器内设置有肥箱中化肥表面拟合模块、化肥体积计算模块、化肥余量转换模块、施肥时长预测模块和人机交互界面;所述化肥中化肥表面拟合模块用于根据激光测距传感器阵列采集的深度信号,对肥箱中的化肥表面进行曲面重建;所述化肥体积计算模块用于根据计算得到的化肥表面信息,计算得到肥箱内的剩余化肥的空间体积;所述化肥余量装换模块用于根据计算得到的剩余化肥的空间体积,计算得到当前剩余化肥的质量;所述施肥时长预测模块用于根据当前施肥速率和剩余化肥的质量,对施肥时长进行预测;所述人机交互界面用于对肥箱中化肥余量及施肥时长进行显示。
进一步地,所述主控设备与所述电控系统采用CAN通讯。
本发明的第二个方面,是提供一种肥箱余量监测方法,其包括以下步骤:
1)对电控系统中的激光测距传感器阵列进行复位,并检查是否复位完成,若完成,则进入步骤2),否则,持续复位;
2)主控设备对电控系统中控制器处理后的各传感器信息进行读取,使用RANSAC算法剔除误差,并使用三维重建技术实现化肥表面的拟合重建,得到肥箱内化肥余量;
3)根据提前标定的施肥速率控制表,判断肥箱余量是否充足,若充足,则通过人机界面对肥箱余量信息进行显示,否则,发出空箱警报。
进一步地,所述步骤2)中,计算化肥余量的方法,包括以下步骤:
2.1)以激光测距传感器阵列所在平面构建传感器点阵平面,对化肥箱底部到传感器点阵平面的体积进行标定,得出标定好的空箱体积;
2.2)基于激光测距传感器检测到的肥箱中化肥表面距离传感器点阵平面的深度信息,利用三维重建的原理进行曲面重建,进而计算出传感器点阵平面到化肥表面之间的空间体积;
2.3)使用标定好的空箱体积减去传感器点阵平面到化肥表面之间的空间体积,得到化肥箱中的实际剩余化肥的体积。
2.4)根据肥箱中实际剩余化肥的体积及堆积密度,得到肥箱中实际剩余化肥质量。
进一步地,所述步骤2.4)中,实际剩余化肥质量的计算公式为:
M=ρ×V
式中:M代表化肥箱中剩余化肥的质量;ρ代表化肥箱中化肥的堆积密度;V代表化肥箱中剩余化肥的体积。
进一步地,所述步骤3)中,施肥时间的预测公式为:
T=M/q
式中:M代表化肥箱中剩余化肥的质量;T代表化肥排空时间;q代表化肥箱中排出的速率。
本发明由于采取以上技术方案,其具有以下优点:(1)本发明的电控系统中设置有激光测距传感器阵列,能够实时监测肥箱中化肥的堆积形状和余量,拟合图形误差小且余量检测线性度高;(2)本发明的电控系统中设置有开度检测传感器和转速检测传感器,能够实时监测肥箱中排肥轴的开度和转速,并结合肥箱余量预测施肥时长进行排空预警;(3)本发明控制器与显示屏之间利用CAN总线进行通讯,可以实现实时通讯,通信速度快,可靠性强。因此,本发明可以广泛应用于肥箱余量监测领域。
附图说明
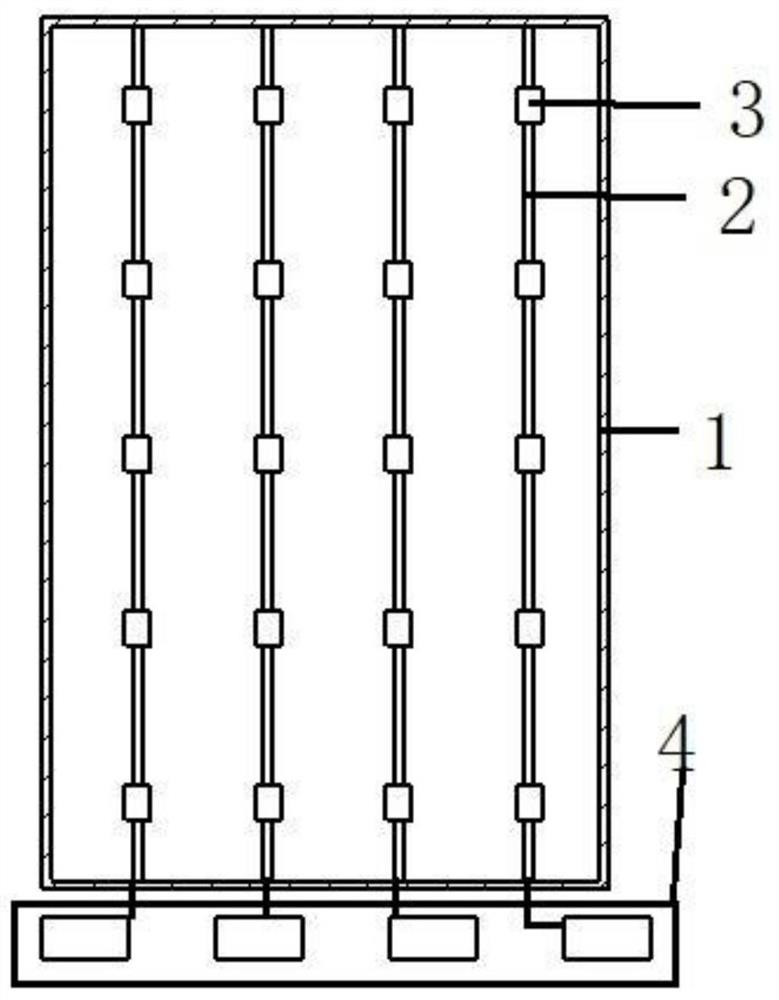
图1为本发明余量检测装置结构原理示意图;
图2为本发明排肥机构模型;
图3a和图3b分别为本发明排肥盒局部视图和排肥盒内部槽轮安装效果图;
图4为本发明检测系统的流程示意图;
图5为化肥箱余量在线检测原理;
图6为具有噪声数据的化肥表面拟合图像;
图7为最小二乘法与RANSAC算法优化对比;
图8为RANSAC算法的错误结果;
图中各附图标记如下:1、肥箱;2、固定导轨;3、激光测距传感器;4、Arduino控制器;5、5V供电电源;6、编码器;7、排肥盒;8、堵塞传感器;9、开度检测传感器;10、推杆;11、24V电源;12、电机。
具体实施方式
下面结合附图和实施例对本发明进行详细的描述。
如图1、图2所示,为本发明提供的一种肥箱余量监测系统,其包括:已有施肥机以及设置在施肥机中的电控系统和主控设备。具体的,施肥机包括肥箱1、排肥机构以及驾驶室,排肥机构设置在肥箱1下部侧壁的出肥口处,用于对施肥速率进行调节;电控系统包括激光测距传感器阵列、开度检测传感器9、转速检测传感器、5V供电电源5、24V供电电源11以及控制器;其中,激光测距传感器阵列设置在肥箱1顶部内侧,用于对肥箱内化肥距离肥箱顶部内侧(即传感器平面)的距离信息进行实时监测并发送到控制器;开度检测传感器设置在排肥机构中,用于对排肥机构中排肥轴的开度进行检测,并发送到控制器;转速检测传感器设置在排肥机构中,用于对排肥机构中排肥轴的转速进行检测并发送到控制器;控制器设置在肥箱1一侧,用于对接收到的所有信息进行处理并发送到主控设备;5V供电电源用于为各传感器和控制器供电。主控设备设置在驾驶室中,用于根据接收到的信息对肥箱余量进行监测,并根据肥箱余量以及当前施肥速率对施肥时长进行预测以及排空预警。
优选地,激光测距传感器阵列包括若干激光测距传感器1,且各激光测距传感器通过设置在肥箱1顶部同一水平面上的若干固定导轨2设置在肥箱1顶部,构成平面点阵,用于采集化肥表面的点云信息检测深度信息。更为优选地,激光测距传感器数量为24个,呈4*6阵列排布。
优选地,控制器包括第一~第四子控制器4,各子控制器均采用Arduino控制器,各子控制器均内置A/D转换模块。其中,第一~第四子控制器分别与激光测距传感器阵列中每一列中的激光测距传感器相连,用于接收各列中激光测距传感器采集的距离信息,经A/D转换模块进行模数转换后,计算得到实时的距离信息;第二子控制器用于接收开度检测传感器采集的位移量变化信息,经A/D转换模块进行模数转换后,得到实时的位移信息;第三子控制器用于接收转速传感器采集的转速信息,经A/D转换模块进行模数转换后,得到实时的速度值。
优选地,如图2和图3a、图3b所示,施肥机构包括排肥盒7、排肥槽轮13、排肥轴14、肥箱1、开度调节推杆10、转速调节电机12、编码器6和24V电源11。其中,排肥盒7设置在肥箱1壁的出肥口处,排肥盒7内设置有排肥槽轮13,排肥槽轮13内插设有排肥轴14,开度调节推杆10和转速调节电机12分别与排肥轴14相连,通过调整开度调节推杆10和转速调节电机12实现对排肥轴14的开度和转速的调节,进而调整施肥速率;编码器6用于对转速调节电机12的转速进行读取,并发送到主控设备,24V电源11用于为转速调节电机12供电。
优选地,主控设备内设置有主控制器,该主控制器内设置有肥箱中化肥表面拟合模块、化肥体积计算模块、化肥余量转换模块、施肥时长预测模块和人机交互界面。其中,化肥中化肥表面拟合模块用于根据激光测距传感器阵列采集的深度信号,对肥箱中的化肥表面进行曲面重建;化肥体积计算模块用于根据计算得到的化肥表面信息,计算得到肥箱内的剩余化肥的空间体积;化肥余量装换模块用于根据计算得到的剩余化肥的空间体积,计算得到当前剩余化肥的质量;施肥时长预测模块用于根据当前施肥速率和剩余化肥的质量,对施肥时长进行预测;人机交互界面用于对肥箱中化肥余量及施肥时长进行显示。
优选地,主控设备与电控系统的通讯方式采用CAN通讯。
如图4所示,基于上述肥箱余量监测系统,本发明还提供一种肥箱余量监测方法,包括以下步骤:
1)对电控系统中的激光测距传感器阵列进行复位,并检查是否复位完成,若完成,则进入步骤2),否则,持续复位。
2)主控设备对电控系统中控制器处理后的各传感器信息进行读取,使用RANSAC算法剔除误差,并使用三维重建技术实现化肥表面的拟合重建,得到肥箱内化肥余量。
电控系统中,各激光测距传感器检测的深度信息,输入主控设备,通过算法计算就可拟合图形和计算结果,并对施肥时长进行预测,进行排肥预警。本发明研究了基于激光点云的三维重建方法,进行化肥箱余量的监测,具体的,包括以下步骤:
2.1)如图5所示,以激光测距传感器阵列所在平面构建传感器点阵平面,对化肥箱底部到传感器点阵平面的体积进行标定,得出标定好的空箱体积。
2.2)基于激光测距传感器检测到的肥箱中化肥表面距离传感器点阵平面的深度信息,利用三维重建的原理进行曲面重建,进而计算出传感器点阵平面到化肥表面之间的空间体积。
如图6所示,由于采用激光测距传感器阵列利用飞行时间法进行深度数据的采集,在实际使用过程中,会产生噪声数据,噪声数据会影响整体的检测数据,需要对传感器点阵的检测信息进行预处理。为了剔除噪声数据,对检测效果的影响,本发明拟采用多次重复检测的方法剔除噪声数据。对数据进行优化的最常用的方法是最小二乘法,但在使用最小二乘法对数据进行优化时,由于噪声数据的干扰,最终所得的结果与真实值差距较大。因此本发明拟采用随机抽样一致算法(Random Sample Consensus,RANSAC)进行数据的优化。RANSAC算法假设数据中包含正确数据和异常数据(或称为噪声)。正确数据记为内点(inliers),异常数据记为外点(outliers)。同时RANSAC也假设,给定一组正确的数据,存在可以计算出符合这些数据的模型参数的方法。随机性是根据正确数据出现概率去随机选取抽样数据,根据大数定律,随机性模拟可以近似得到正确结果。
如图7所示,为采用最小二乘法与随机抽样一致算法对深度数据优化后的结果。由图7可知,基于随机抽样一致算法(RANSAC)的算法机理将数据分为外点和内点进行数据优化,相较于最小二乘法将所有数据进行最小方差的分析记性数据优化,使用RANSAC算法可将较少的外点排除。
如图8所示,由于随机抽样一致算法准确率不能达到100%,在进行多次迭代的抽样时有一定几率多次抽中其中一个外点可能导致错误的结果,因此,优化结果需要加入阈值判别进行处理。
2.3)使用标定好的空箱体积减去传感器点阵平面到化肥表面之间的空间体积,得到化肥箱中的实际剩余化肥的体积。
2.4)根据肥箱中实际剩余化肥的体积及堆积密度,得到肥箱中实际剩余化肥质量。
已知化肥的剩余体积与堆积密度相乘就可得到剩余质量,通过公式(1)就可以得出化肥箱剩余化肥的质量。
M=ρ×V (1)
式中:M代表化肥箱中剩余化肥的质量;ρ代表化肥箱中化肥的堆积密度;V代表化肥箱中剩余化肥的体积。
3)根据提前标定的施肥速率控制表,判断肥箱余量是否充足,若充足,则通过人机界面对肥箱余量信息进行显示,否则,发出空箱警报。
本发明中施肥机构可以为任意的排肥形式,施肥前,需要针对施肥机的排肥速率进行标定,并生成全因素的施肥速率控制表。
通过设置的电控系统,可以得到:化肥箱中的化肥剩余量、实时的开度信息、实时的转速信息。化肥从化肥箱中排出的速率(q)是由实时的开度(L)和转速(N)决定的。在使用施肥机的过程中,通过重复试验本发明得出结论:当肥箱中的剩余量低于一个定值δ时,此时肥箱中的化肥排出速率远小于(q)。因此,通过本发明得到的这三个信息就可以在化肥箱中化肥剩余量不能保证正常工作之前发出预警信息。同时,本发明也可以对化肥排空的时间进行预测。
施肥时间的预测是通过以下公式(2)进行计算的:
T=M/q (2)
式中:M代表化肥箱中剩余化肥的质量;T代表化肥排空时间;q代表化肥箱中排出的速率。
以上所述仅为本发明的实施例,并非因此限制本发明的保护范围,凡是利用本发明的说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明保护范围内。
- 一种肥箱余量监测系统与监测方法
- 一种肥箱余量监测系统