自走式装置及其建立地图方法
文献发布时间:2023-06-19 09:36:59
技术领域
本发明有关于一种自走式装置及其建立地图方法,尤指一种用于在工作空间内移动进行预设作业的自走式装置及其建立地图方法。
背景技术
随着科技的日新月异,传统清洁、巡检、搬运…等人力工作逐渐以自动化机器取代,自走式装置也应运而生;已知的自走式装置可以光学传感器配合同步定位与地图建构(Simultaneous localization and mapping;SLAM)技术建立工作空间的地图,以利后续借由地图规划出预设的移动路径,但地图的建立方式,可能会因自走式装置的体积大小或工作空间大小而有所差异。
如家用型扫地机器人因机体体积与工作空间都相对较小,在建立地图时,不需特别考虑家用型扫地机器人是否已移动覆盖全部工作空间,也不需特别考虑家用型扫地机器人是否会撞伤障碍物,故使用者(客户)可放任家用型扫地机器人等小型的自走式装置在工作空间内随机移动以建立地图。
但商用型扫地机器人因机体体积与工作空间都相对较大,在建立地图时,需特别考虑商用型扫地机器人是否已移动覆盖全部工作空间,也需特别考虑商用型扫地机器人是否会撞伤障碍物,故目前商用型扫地机器人等大型的自走式装置在建立地图时,通常是由自走式装置制造商的工程人员携带外部电脑至工作空间内,以外部电脑控制自走式装置在工作空间内移动并以外部电脑内的地图建立系统建立地图。
发明内容
已知大型的自走式装置在建立地图时,使用者(客户)需请工程人员(制造商)携带外部电脑至工作空间内,以工程人员(制造商)的专业经验配合外部电脑内的地图建立系统控制自走式装置在工作空间内移动,以建立工作空间的地图,并在地图建立完成后将自走式装置交还使用者(客户)使用;故每次工作空间有所变更时,使用者(客户)皆需请工程人员(制造商)至工作空间内重新建立地图,如此使用者(客户)将耗费许多等待成本,工程人员(制造商)也耗费许多出差成本,相当不便!
因此,本发明的目的,在于提供一种便于建立地图的自走式装置。
本发明的另一目的,在于提供一种便于建立地图的自走式装置建立地图方法。
本发明的又一目的,在于提供一种用以执行如所述自走式装置建立地图方法的装置。
依据本发明目的的自走式装置,包括:一本体,可在一工作空间内移动;一地图建立单元,设于该本体上;该地图建立单元设有一传感器与一显示介面;该传感器可检测该工作空间的特征;该显示介面以不同的图案显示该传感器已检测的工作空间与未检测的工作空间及该本体在已检测的工作空间与未检测的工作空间的位置。
依据本发明另一目的的自走式装置建立地图方法,包括:提供一工作空间;提供一自走式装置,设有一传感器与一显示介面;使该自走式装置在该工作空间内以该传感器检测该工作空间的特征,并使该显示介面以不同的图案显示该传感器已检测的工作空间与未检测的工作空间及该自走式装置在已检测的工作空间与未检测的工作空间的位置;根据该显示介面的显示,控制该自走式装置于该工作空间内朝该未检测的工作空间移动。
依据本发明又一目的的自走式装置,包括:用以执行如所述自走式装置建立地图方法的装置。
本发明实施例的自走式装置及其建立地图方法,该自走式装置上的显示介面可以不同的图案显示地图资讯,方便使用者一边参考该显示介面所显示的地图资讯,一边在该自走式装置旁侧控制该自走式装置于该工作空间内朝该未检测的工作空间移动,以逐步建立该工作空间的地图。
附图说明
图1是本发明实施例中自走式装置的示意图。
图2是本发明实施例中自走式装置在工作空间移动的示意图。
图3是本发明实施例中自走式装置在B点时,显示介面所显示的图案的示意图。
图4是本发明实施例中自走式装置在C点时,显示介面所显示的图案的示意图。
图5是本发明实施例中自走式装置在B点时,显示介面所显示的图案与显示介面及本体相对位置关系的示意图。
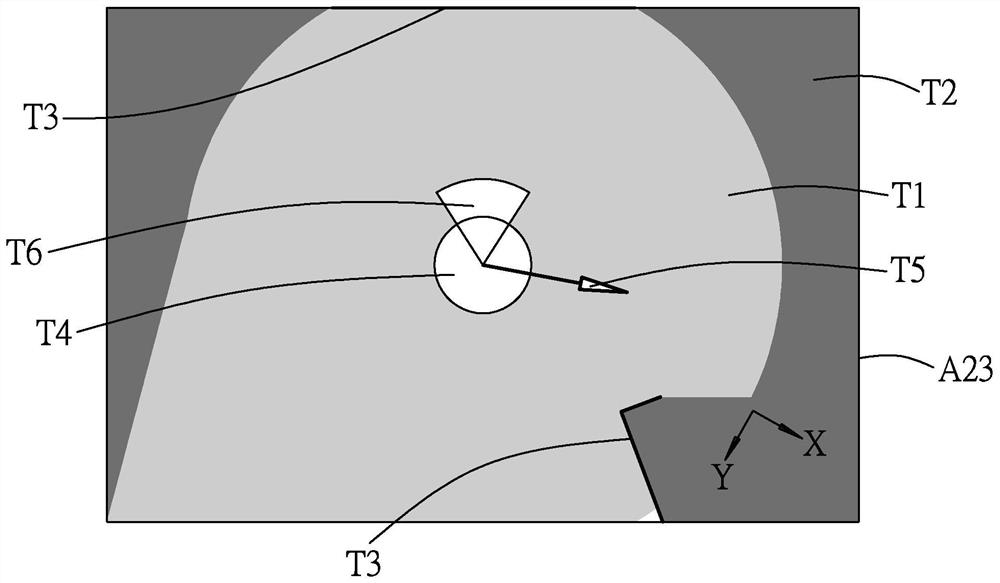
图6是本发明实施例中自走式装置在C点时,显示介面所显示的图案与显示介面及本体相对位置关系的示意图。
【符号说明】
A 自走式装置 A1 本体
A2 地图建立单元 A21 传感器
A22 处理器 A23 显示介面
A3 驱动单元 A31 前导轮
A32 后导轮 A33 驱动轮
A4 清洁单元 A41 吸尘机构
A42 刷洗机构 A43 吸液机构
A5 控制单元 B 点
C 点 F 工作表面
O 障碍物 S 工作空间
T1 第一图案 T2 第二图案
T3 第三图案 T4 第四图案
T5 第五图案 T6 第六图案
Z 墙壁
具体实施方式
请参阅图1、2,本发明实施例的自走式装置建立地图方法可采用如图1所示的可自动移动进行清洁工作的自走式装置A来达成;该自走式装置A可在如图2所示的工作空间S内移动,以建立该工作空间S的地图;该工作空间S由四面墙壁Z所围设形成且该工作空间S内设有障碍物O;该自走式装置A设有:
一本体A1,可在一工作空间S内移动(如点B至点C);
一地图建立单元A2,设于该本体A1上,可检测该本体A1于该工作空间S内移动时所遇到的例如障碍物O或墙壁Z…等环境的特征,并纪录这些特征以建立该工作空间S的地图资讯;该地图建立单元A2设有一传感器A21、一处理器A22与一显示介面A23;该传感器A21可检测该工作空间S的特征;该处理器A22可将该传感器A21所检测的特征处理成地图资讯;该显示介面A23可显示该处理器A22处理后的地图资讯;其中,该传感器A21为光达(LIDAR)传感器并设于该本体A1之前侧,可对该本体A1前侧的该工作空间S进行扫描检测(扫描检测的范围约成扇形);该显示介面A23为触控式萤幕并设于该本体A的上侧,可以不同的图案显示该传感器A21已检测的工作空间S与未检测的工作空间S及该本体A1相对在已检测的工作空间S与未检测的工作空间S的位置或提供使用者触控点选预设功能的选项;
一驱动单元A3,设于该本体A1的底部,可驱动该本体A1于该工作空间S的工作表面F上自动移动执行前进、后退、旋转…等动作;该驱动单元A3设有一前导轮A31、一后导轮A32与两个驱动轮A33,该前导轮A31与该后导轮A32分设于该本体A1之前、后侧,该两个驱动轮A33分设于该本体A1约略中间处的两侧;
一清洁单元A4,设于该本体A1的底部,可在本体A1移动时清洁该工作表面F;该清洁单元A4设有一吸尘机构A41、一刷洗机构A42与一吸液机构A43,该吸尘机构A41设于该本体A1之前侧,该吸液机构A43设于该本体A1之后侧,该刷洗机构A42设于该吸尘机构A41与该吸液机构A43之间;
一控制单元A5,设于该本体A1上,可执行各项数据运算并执行该自走式装置A的各种功能控制。
请参阅图2、3、4,该自走式装置A在点B时,该显示介面A23所显示的地图资讯如图3所示;该自走式装置A在点C时,该显示介面A23所显示的地图资讯如图4所示;该显示介面A23将以数种不同的图案显示该工作空间S的地图资讯,其可包括:
一第一图案T1,以第一颜色(绿色)显示已检测的工作空间S;
一第二图案T2,以第二颜色(红色)显示未检测的工作空间S;
一第三图案T3,以第三颜色(黑色)显示已检测的该障碍物O部分;
一第四图案T4,以预设图案(圆形)显示该本体A1相对该已检测的工作空间S与该未检测的工作空间S的位置;
一第五图案T5,以指向性的图案(箭头)指向该未检测的工作空间S的图案(第二图案T2)中距离该本体A1最近者;
一第六图案T6,以检测方向的图案(扇形)显示该本体A1的检测方向(即该本体A1的向前移动方向);
其中,这些图案的颜色或形状是提供使用者方便辨识之用,并不以此为限,亦可使用符号、填充线、颜色深浅…等视觉差异替代。
请参阅图2、3、4,虽然该自走式装置A在点B与点C的移动方向皆不相同,但该第四图案T4在该显示介面A23中以预设大小保持于该显示介面A23的预设位置(该显示介面A23之中央处),且该第六图案T6在该显示介面A23中以预设大小保持于该显示介面A23的预设位置(朝向该本体A1之前侧);该显示介面A23仅可显示该本体A1周围预设范围的部分地图资讯,随着该自走式装置A的移动,该显示介面A23所显示的地图资讯亦会改变;换言之,如图3、4、5、6所示,该第一图案T1、第二图案T2、第三图案T3与第五图案T5可随着该自走式装置A移动方向的不同而改变与该显示介面A23及本体A1的相对位置,但该第四图案T4与第六图案T6不随着该自走式装置A移动方向的不同而改变与该显示介面A23及本体A1的相对位置。
本发明实施例的自走式装置建立地图方法在实施上,当该自走式装置A初至未知的工作空间S或原本工作空间S的环境有所变化时,使用者可直接由该自走式装置A建立新的地图资讯;使用者以遥控器遥控或人力推动方式在该自走式装置A旁侧控制该自走式装置A于该工作空间S进行移动,使该自走式装置A以前侧的该传感器A21对该工作空间S的特征进行扫描检测;并使该显示介面A23以不同的图案显示该传感器A21已检测的工作空间S与未检测的工作空间S及该自走式装置A相对在已检测的工作空间S与未检测的工作空间S的位置;
当使用者以点B作为该自走式装置A建立地图的起点时,使用者在参考图3中该显示介面A23所显示的资讯后可知,大部分代表未检测的工作空间S的第二图案T2分布于该自走式装置A之后侧,故使用者根据该显示介面A23所显示的资讯,控制该自走式装置A转向后侧朝未检测的工作空间S移动;或者,使用者直接参考该显示介面A23中该第五图案T5的建议方向,控制该自走式装置A转向后侧朝未检测的工作空间S移动;
当使用者控制该自走式装置A移动至点C时,使用者在参考图4中该显示介面A23所显示的资讯后可知,大部分代表未检测的工作空间S的第二图案T2存在于该自走式装置A的右侧,故使用者根据该显示介面A23所显示的资讯,控制该自走式装置A转向右侧朝未检测的工作空间S移动;或者,使用者直接参考该显示介面A23中该第五图案T5的建议方向,控制该自走式装置A转向右侧朝未检测的工作空间S移动;以此类推逐渐扩增该已检测的工作空间S,逐步建立该工作空间S的地图。
本发明实施例的自走式装置及其建立地图方法,该自走式装置A上的显示介面A23可以不同的图案显示地图资讯,方便使用者一边参考该显示介面A23所显示的地图资讯,一边在该自走式装置A旁侧控制该自走式装置A于该工作空间S内朝该未检测的工作空间S移动,以逐步建立该工作空间S的地图。
以上所述仅为本发明的较佳实施例而已,当不能以此限定本发明实施的范围,即大凡依本发明申请专利范围及发明说明内容所作的简单的等效变化与修饰,皆仍属本发明专利涵盖的范围内。
- 自走式装置及其建立地图方法
- 一种地图建立方法、地图建立装置及机器人