一种基于时空众包工人行为预测的任务分配方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明属于神经网络和推荐算法的技术领域,尤其涉及一种基于时空众包工人行为预测的任务分配方法。
背景技术
近年来,随着移动互联网的发展,促使着智能设备的迅速普及,时空众包引起了人们的广泛关注,逐渐成为一种创新性的变革性平台,人们可通过实际移动到指定位置来执行众包任务,如获取道路的实时路况信息,收集地点信息等。新兴的众包应用平台包括滴滴和Uber等打车服务,美团和Eleme等订餐和送货服务,以及GigWalk等动态信息收集服务。如何给工人分配最佳的时空任务依然作为时空众包领域研究的一个核心热点问题。
现有的众包任务分配方式通常假设基于静态场景,时空众包任务和工人的时空信息在任务分配前已完全获知,而在现实场景中时空众包任务和工人都是无规律动态出现的,因此,时空信息的预测对于提高时空众包平台的任务分配具有很大的潜力。此外,解决时空众包任务分配问题,大多基于静态场景下的任务分配方式没有综合考虑任务有效时间和总旅行成本等约束条件,无法对众包工人进行最佳的全局最佳任务分配策略,将会导致时空众包任务和工人的闲置率过高,进而存在任务分配效率不高的情况。
发明内容
有鉴于此,本发明是为了解决上述现有技术和方法存在的不足之处,提出一种基于时空众包工人行为预测的任务分配方法,通过综合考虑时空众包数据的时间依赖性和空间依赖性来分析工人行为轨迹预测问题,综合考虑任务有效时间和总旅行成本等约束来分析全局最佳任务分配问题,为工人推荐合适的任务,以期提高任务分配的质量和效率。
为了达到上述目的,本发明通过以下技术方案来实现:
本发明一种基于众包工人时空行为预测的任务分配方法的特点在于,包括以下步骤:
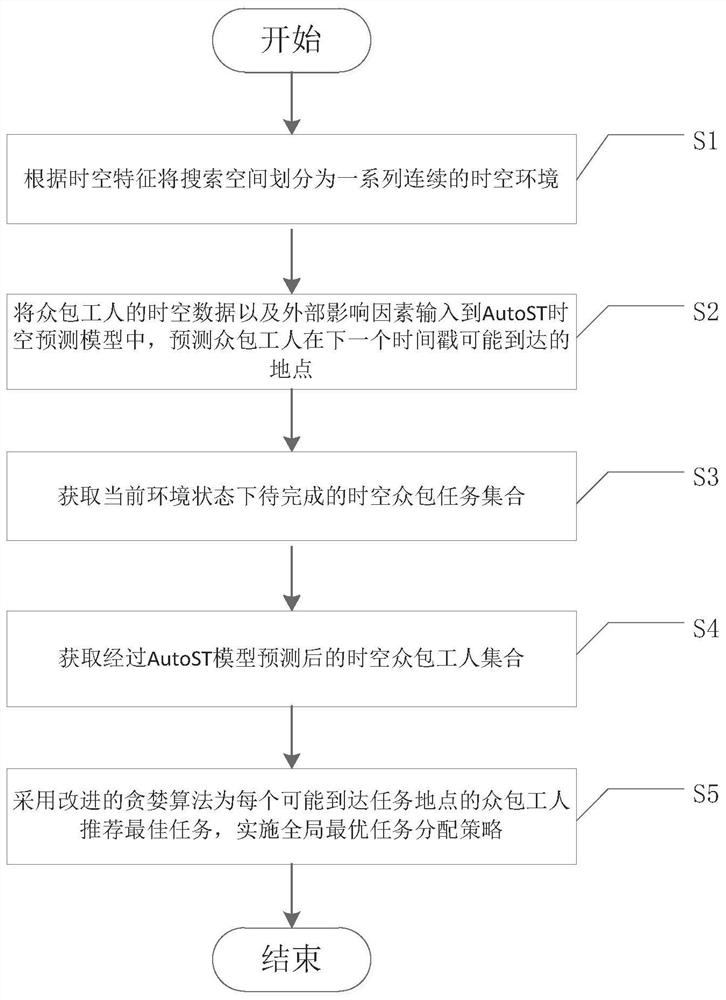
步骤S1、根据时空特征将搜索空间划分为一系列连续的时空环境,沿着经度和纬度将待分配任务所在的区域划分为M×N个网格,网格划分的分辨率根据应用需要由M和N控制;
步骤S2、将众包工人的时空数据以及外部影响因素输入到面向时空预测的高效神经网络学习模型(AutoST模型)中,预测众包工人在下一个时间戳可能到达的地点;
步骤S3、获取当前环境状态下所有待完成的时空众包任务集合,并依次编号,从而构成时空众包任务集合T={t
步骤S4、获取经过AutoST模型预测后的时空众包工人集合,并依次编号,从而构成时空众包工人集合W={w
步骤S5、采用改进的贪婪算法为每个众包工人推荐最佳任务,实施全局最优任务分配策略。
进一步,步骤S2包括以下分步骤:
S21、设计高效的时空搜索空间,动态捕捉空间相关性;
S22、将众包工人与任务的亲密度(Closeness)、众包工人的运动周期(Period)、趋势动向(Trend)构成三范式(CPT范式),和外部影响因素(如天气、交通等)一起输入到AutoST模型中进行时空预测;
S23、通过搜索算法对模型做进一步的优化;
S24、准确率计算,选择平均绝对误差和平均绝对百分比误差来衡量预测的准确率。
进一步,步骤S5包括以下分步骤:
S51、将从步骤S3获取的时空众包任务集合构建成任务队列,每当工人到达或工人完成他的最后一个任务时,算法从任务队列中为他找到一个新任务;
S52、使用制定的贪心函数来为众包工人推荐新的任务,综合考虑众包任务的有效时间以及工人与任务之间的距离比,计算如下:
其中Ben(w,t)表示任务的推荐质量,d
进一步,步骤S21包括以下分步骤:
S211、候选单元处理;在时空预测中,临近区域可能会相互影响,因此卷积运算对于建立局部地理相关性模型非常重要;另外,不同核大小的卷积模型的空间相关性不同,因此考虑采用不同的卷积核,使用低卷积捕获局部相关性和用高卷积编码获取全局相关性进行众包工人行为预测;
时空信息预测不同于图像预测,不需要池化操作,因为池化操作可能会导致信息丢失,因此删除了池化操作,并且将搜索候选单元分成两类:
卷积操作组成的3×3标准卷积、5×5标准卷积、3×3分离卷积以及5×5分离卷积;
跳跃连接操作,包括无连接操作和标识操作;
为了保证输出的形状和输入的形状相同,我们使用相同的步长等于1的卷积核,并且输入和输出的滤波器尺寸相同。
S212、操作模块处理:为了解决内存效率低,从而进行高效的搜索,AutoST的关键模块ST-NASNet主要进行两种类型的操作,分别是混合卷积操作和混合连接操作;混合卷积操作在每一层搜索不同的卷积核,计算所有卷积输出的加权和;混合连接操作在不同层之间学习否连接操作,用连接概率乘以各层的输出,目的是进行不同级别特征的融合;
S213、构建神经结构搜索网络:外部网络的固定结构可能会影响预测性能,为了使网络更高效,根据时空预测特点,从以下两个方面对搜索空间进行约束;首先相邻层中只有一个卷积,可以捕获大范围的空间依赖性;其次,在融合多层次特征时不需要进行外部特征转换,只需将前一层的输出添加到当前层即可;第l层的输出可以表示为:
其中o
进一步,步骤S22包括以下分步骤:
采用CPT范式,将众包工人与任务的亲密度、众包工人的运动周期和趋势动向以及外部影响因素输入到AutoST模型中,其中众包工人与任务的亲密度通过皮尔逊相关系数方法求出;对于具有L层的AutoST模型来说,结构参数A和模型参数M可以被定义为:
其中,n
o=Relu(f(o
其中o
进一步,步骤S23包括以下分步骤:
AutoST的训练包括两个阶段,搜索阶段和验证阶段。在搜索阶段,首先将数据分解为训练集和验证集,然后利用训练损失L
θ'=θ-βΔ
其中β和γ是学习率,计算各层的最优卷积和连接操作如下:
其中,c
与已有技术相比,本发明的基于时空众包工人行为预测的任务分配方法有益效果体现在:
本发明从实际情况出发,将时空预测加入到任务分配策略中,对于提高时空众包平台的效用具有很大的帮助。从更全面的角度考虑了任务有效时间和总旅行成本的约束条件,满足了从全局角度对时空众包任务分配的优化问题,从而提高任务分配的质量和效率,使时空众包平台得以充分利用。
附图说明
图1为本发明提供的一种基于时空众包工人行为预测的任务分配方法的流程图。
图2为步骤S2的具体步骤的流程。
图3为步骤S21的具体步骤流程图。
图4为模型AutoST建立高效搜索空间的结构操作图。
图5为模型AutoST对时空众包工人进行时空预测的演示图。
图6为AutoST模型和ENAS算法、DARTS算法的性能对比图。
图7为AutoST模型和ENAS算法、DARTS算法的计算时间对比图。
图8为待分配任务示意图。
图9为基于改进贪婪算法的全局优化任务分配过程示意图。
具体实施方式
下面结合附图,对本发明实例中的技术方案进行清楚完整地描述,其作为本说明书的一部分,通过实施例来说明本发明的原理,本发明的其他方面、特征及其优点通过该详细说明将会变得一目了然。
第一实施例
请参阅图1,本发明提供的一种基于时空众包工人行为预测的任务分配方法的流程图。下面将对图1的具体流程进行详细阐述。
步骤S1:根据时空特征将搜索空间划分为一系列连续的时空环境,沿着经度和纬度将待分配任务所在的区域划分为M×N个网格,网格划分的分辨率根据应用需要由M和N控制。基于网格的方法使用多分辨率的网络数据结构,它将对象空间量化为有限数目的单元,这些单元形成了网络结构,这种方法的优点是处理速度快。
步骤S2:将众包工人的时空数据以及外部影响因素输入到AutoST模型中,预测众包工人在下一个时间戳可能到达的地点。进一步的,如图2所示,该步骤具体还包括:
步骤S21:设计高效的时空搜索空间,动态捕捉空间相关性。进一步的,如图3所示,步骤S21的具体步骤包括:
步骤S211:候选单元处理。在时空预测中,临近区域可能会相互影响。因此卷积运算对于建立局部地理相关性模型非常重要。另外,不同核大小的卷积模型的空间相关性不同,因此考虑采用不同的卷积核,使用低卷积捕获局部相关性和用高卷积编码获取全局相关性进行众包工人行为预测。
时空信息预测不同于图像预测,不需要池化操作,考虑到池化操作可能会导致信息丢失,因此删除了池化操作,并且将搜索候选单元分成两类:
(1)卷积操作组成的3×3标准卷积、5×5标准卷积、3×3分离卷积以及5×5分离卷积。
(2)跳跃连接操作,包括无连接操作和标识操作。
为了保证输出的形状和输入的形状相同,我们使用相同的步长等于1的卷积核,并且输入和输出的滤波器尺寸相同。
步骤S212:操作模块处理。众所周知,为了解决内存效率低,从而进行高效的搜索,AutoST的关键模块ST-NASNet主要进行两种类型的操作,分别是混合卷积操作和混合连接操作。如图4所示,蓝色箭头表示混合卷积块
将卷积单元{a
混合连接块的计算定义为:
其中,f是卷积操作,θ是f的参数,σ表示sigmoid激活函数。
步骤S213:构建神经结构搜索网络。外部网络的固定结构可能会影响预测性能,为了使网络更高效,根据时空预测特点,从以下两个方面对搜索空间进行约束。首先相邻层中只有一个卷积,可以捕获大范围的空间依赖性。其次,在融合多层次特征时不需要进行外部特征转换,只需将前一层的输出添加到当前层即可。第l层的输出可以表示为:
其中o
步骤S22:如图5所示,此步骤采用CPT范式,将众包工人与任务的亲密度,运动周期,趋势动向以及外部影响因素输入到AutoST模型中,其中众包工人与任务的亲密度通过皮尔逊相关系数方法求出。对于具有L层的AutoST模型来说,结构参数A和模型参数M可以被定义为:
其中,n
o=Relu(f(o
其中o
步骤S23:通过搜索算法对模型做进一步优化。
AutoST的训练包括两个阶段,搜索阶段和验证阶段。在搜索阶段,首先将数据分解为训练集和验证集,然后利用训练损失L
θ'=θ-βΔ
其中β和γ是学习率。计算各层的最优卷积和连接操作如下:
其中,c
步骤S24:采用平均绝对误差(RMSE)和平均绝对百分比误差(MAPE)对预测的准确率进行评价。RMSE和MAPE的计算式为:
其中n是值得个数,
第二实施例
与第一实施例不同的是我们要在获取的候选任务集中为通过AutoST预测到的众包工人分配最合适他们的任务。具体步骤包括:
步骤S3:获取当前环境状态下所有待完成的时空众包任务集合,并依次编号,从而构成时空众包任务集合。
时空众包任务集合表示为:T={t
步骤S4:获取经过AutoST模型预测后的时空众包工人集合,并依次编号,从而构成时空众包工人集合。
时空众包工人集合表示为:W={w
步骤S5:采用改进的贪婪算法为每个众包工人推荐最佳任务,实施全局最优任务分配策略。
将获取的时空众包任务集合构建成任务队列,每当工人到达或工人完成他的最后一个任务时,算法从任务队列中为他找到一个新任务;使用制定的贪心函数来为众包工人推荐新的任务,综合考虑众包任务的有效时间以及工人与任务之间的距离比,计算如下:
其中Ben(w,t)表示任务的推荐质量,d
第三实施例
在本实例中,为了测试本发明利用AutoST模型预测时空众包工人在下一个时间戳可能到达的地点的准确性,本发明采用的实验数据集为Gowalla2009年5月到2010年12月的纽约市范围内的签到数据,包含用户数据37385条,时空众包任务位置940个。对于数据的预处理,移除不活跃的用户信息,保留签到数据至少有10次和访问次数至少有10次的地点信息。首先将纽约划分为32×32的网格,然后计算每个网格的流入量和流出量,以此作为众包工人的运动周期和趋势动向的统计方式,最后将时空众包工人的行为数据以及外部影响因素输入到模型中。在实验评价中,每个用户签到记录的前70%作为训练集,最后20%作为测试集,其余的10%作为验证集用于模型调参。在搜索阶段,使用验证集来学习神经网络结构,在训练阶段,利用训练集来建立训练模型,利用验证集来执行早停策略。
此外,为了更好地测试本专利提出的模型的预测效果,还与下列算法进行了对比试验,其中AutoST为本专利使用的模型。
ENAS:采用强化学习作为搜索策略,通过共享参数加速搜索过程。
DARTS:将离散和不可微的搜索空间转换为连续搜索空间,从而允许使用基于梯度的优化策略进行更高效的搜索。
AutoST:包括一个由多尺度内核组成的可选卷积块,用于在可变尺度下捕获不同范围的特征;一个可训练的连接块,用于动态融合多尺度空间特征,能够自动搜索处理多范围、多尺度预测问题的体系结构。
性能和计算时间对比结果如图6和图7所示。图中横坐标分别代表ENAS算法、DARTS算法和AutoST模型,纵坐标分别表示的是算法或模型的均方根误差和计算时间。由此观察到AutoST模型花费最少的时间找到最优结构,并且误差小于ENAS算法和DARTS算法。可以看出本发明使用的预测模型效果优于其他两个算法。
例如,如图8所示,我们预测到9:00时会有一个时空众包工人将会到达具有四个待解决任务t1(0,2),t2(2,5),t3(10,0),t4(8,9)的区域内,工人将会到达的位置为w(6,3)。本发明所用距离均为曼哈顿距离。
表1:待分配任务相关信息
表1展示了待解决任务的位置、发布时间、截止时间以及给平台带来的效益的相关信息。
在基于改进的贪婪算法中,使用任务队列来存储亟待被分配给时空众包工人的任务,每当有新工人到达任务区域时,算法就从队列中为工人推荐一个最佳任务。首先将任务队列中的任务根据平台收益进行排序,然后定义两个变量分别表示任务的有效时间和众包工人与任务之间的距离,最后输入到贪心函数中,将Ben(w,t)值最大的任务推荐给工人。
如图9所示,通过本专利的优化算法,四个任务的推荐质量结果如下:Ben(w,t)
综上所述,本发明提供的一种基于时空众包工人行为预测的任务分配方法,从全局角度出发,考虑了时空环境下的动态任务分配,同时考虑了时空众包工人行为轨迹预测,提高了时空众包平台的使用效率,在满足时间的约束条件下,实现了为时空众包工人推荐最佳任务的目标,从而提高了任务分配的质量和效率。本发明提出的方法具有较强的可实施性,可用于多领域研究。
以上所述是本发明的优选实施方式而已,当然不能以此来限定本发明之权利范围,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和变动,这些改进和变动也视为本发明的保护范围。
- 一种基于时空众包工人行为预测的任务分配方法
- 一种基于工人偏好感知的空间众包任务分配方法