用于智能驾驶测试的踏板式摩托车模型
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及智能驾驶测试模型领域,特别是涉及一种用于智能驾驶测试的踏板式摩托车模型。
背景技术
随着汽车的日益普及,特别是在复杂的城市交通系统中,交通安全事故频繁发生;近些年智能驾驶技术高速发展,智能驾驶自动化程度越来越高,智能驾驶汽车的安全性能评估显得格外重要,但是该领域的试验方法和技术均不成熟。车载摄像头、车载雷达、车载夜视仪为代表的传感器将被配备在智能驾驶汽车上,各汽车企业或研究机构在研究AEB(自动紧急制动系统)时,需要对复杂路况进行分析判断。现有技术中,使用真实踏板式摩托车试验不仅对驾驶员生命构成极大的威胁,还会损坏测试车辆,目前国内外通常采用充气模型进行此类试验,但充气模型不具有与真实车辆相同的毫米波雷达反射、红外反射特性(激光雷达系统),视觉外观差异较大,且结构易损坏或对测试车辆造成损伤。
发明内容
本发明提供一种用于智能驾驶测试的踏板式摩托车模型,可解决现有技术中踏板式摩托车模型所面临的上述问题。
本发明的技术解决方案为一种用于智能驾驶测试的踏板式摩托车模型,包括:
车架,包括管架和设置在所述管架上端的车把手;
车身,包括设置在所述管架上的前挡部、脚踏部和座位部;
前轮组件,包括设置在所述车架前端的前轮架以及与所述前轮架转动连接的前轮胎;
后轮组件,包括设置在所述车架后端的后轮架以及与所述后轮架转动连接的后轮胎;
反射增强膜,分别设置在所述前轮架、后轮架以及车身上。
优选地,所述管架包括中心管和设置在中心管一端的前管,所述车把手设置在所述前管的顶端;
所述前挡部包裹所述前管,所述脚踏部和座位部包裹所述中心管;所述前轮组件和后轮组件分别与所述车架磁性连接。
优选地,所述车身采用软质的高分子材料制成,包括珍珠棉和耐磨EVA。
优选地,所述座位部中设置有容纳所述反射增强膜的空腔。
优选地,所述反射增强膜包括可反射毫米波的聚酯反射膜。
优选地,所述智能驾驶测试的踏板式摩托车模型还包括包裹所述车身的车衣,车衣采用具有毫米波雷达反射特性的反射布料。
优选地,所述前轮架包括平行设置的两支架管、设置在所述支架管一端的连接管、设置在所述连接管上的磁铁安装座和设置在所述支架管另一端的中心轴。
优选地,所述前轮胎中心设置有轴承,所述轴承与所述中心轴适配,所述前轮胎的轮毂上还设置有所述反射增强膜。
优选地,所述车架、前轮架和后轮架采用PVC管制成。
优选地,所述智能驾驶测试的踏板式摩托车模型还包括设置在所述车架下方的滑动平台,所述滑动平台在滑动状态下,所述前轮胎和后轮胎与地面接触并转动。
本发明设置了包括车架、车身、前轮组件、后轮组件和反射增强膜的踏板式摩托车模型,其中车架包括管架和设置在所述管架上端的车把手;车身包括设置在所述管架上的前挡部、脚踏部和座位部;前轮组件包括设置在所述车架前端的前轮架以及与所述前轮架转动连接的前轮胎;后轮组件包括设置在所述车架后端的后轮架以及与所述后轮架转动连接的后轮胎;反射增强膜分别设置在所述前轮架、后轮架以及车身上。踏板式摩托车模型外形与真车相同,其设置在运动系统上运动,在运动过程中轮子与地面接触可产生转动,可提高车载摄像头和车载雷达的识别准确性。
附图说明
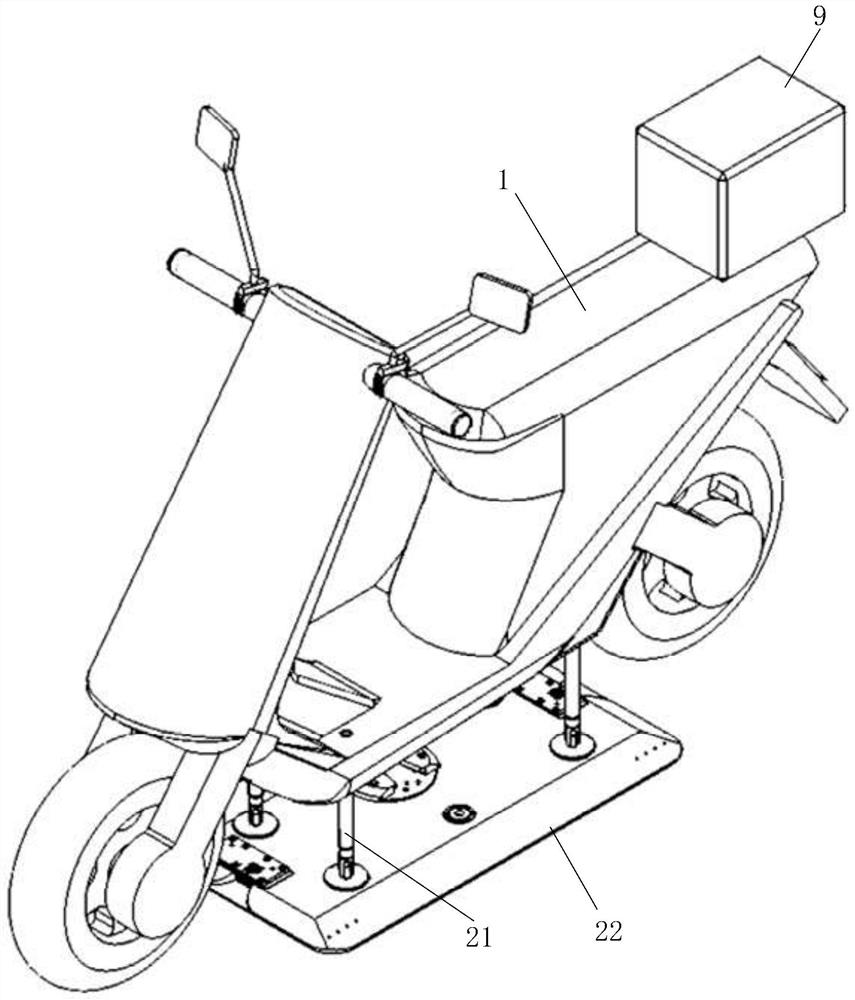
图1为用于智能驾驶测试的踏板式摩托车模型一实施例的结构示意图;
图2为图1实施例中车架的结构示意图;
图3为图1实施例中前轮架的结构示意图;
图4为用于智能驾驶测试的踏板式摩托车模型另一视角的结构示意图;
图5为图1实施例中前轮组件的结构示意图。
具体实施方式
本发明提出一种用于智能驾驶测试的踏板式摩托车模型,踏板式摩托车包括电动摩托车、电动轻便摩托车以及电动自行车。参照图1至图5,该踏板式摩托车模型包括车架、车身1、前轮组件、后轮组件和反射增强膜,车架包括管架和设置在所述管架上端的车把手3,车把手3上设置有后视镜2;车身1包括设置在所述管架上的前挡部1a、脚踏部1b和座位部1c;前轮组件包括设置在所述车架前端的前轮架12以及与所述前轮架12转动连接的前轮胎4;后轮组件13包括设置在所述车架后端的后轮架以及与所述后轮架转动连接的后轮胎6;反射增强膜分别设置在所述前轮架12、后轮架以及车身1上。此外,照明灯和尾灯等配件通过图形贴纸或彩色喷涂打印的方式贴在车身1上,后视镜2和示廓灯等配件通过磁性连接的方式设置在踏板式摩托车模型的对应位置。
在本实施中,车架、前轮架12和后轮架采用PVC管制成。所述管架包括中心管14和设置在中心管14一端的前管15,中心管14呈V形设置,包括依次连接的前段、中段和后段,前管15的下端与前段的自由端固定设置,车把手3设置在所述前管15的顶端。车身1采用软质的高分子材料制成,包括珍珠棉和耐磨EVA泡棉。前挡部1a包裹所述前管15,所述脚踏部1b包裹中心管14的前段和中段,座位部1c包裹所述中心管14的后段;所述前轮组件和后轮组件13分别与所述车架磁性连接。在前段和后段的下方固定设置有汝铁硼磁铁。
在本实施例中,前轮架12和后轮架的结构相同,前轮架12包括平行设置的两支架管12a、设置在所述支架管12a一端的连接管12b、设置在所述连接管12b上的磁铁前安装座10、套设在连接管12b和支架管12a外的防护套17和设置在所述支架管12a另一端的中心轴12c。磁铁前安装座上设置有汝铁硼磁铁,用于与前段上固定座16上的磁铁进行磁性连接,防护套采用EVA泡棉制成,用于保护后轮组件,在碰撞分离后起到缓冲的作用。
在本实施例中,所述前轮胎4和后轮胎6的结构相同,可以相互替换。车轮形状尺寸与真实踏板式摩托车保持一致,由高分子耐磨材料制成,以保证其在与地面接触滚动的情况下可以多次反复利用,车轮内部安装有与中心轴高速轴承,中心轴为金属轴,高速轴承和具有雷达发射特性的金属轴适配。固定轮胎的前轮架12和后轮架是由高强度,韧性好,不易碎的PVC管构成,其质量轻,刚性优良,并在轮胎支架上包覆第一反射膜31等雷达反射材料,使其与真车的金属支架保持一致,轮胎由左右两半拼合而成,中间设置有第二反射膜32,可以很好的模拟真车轮毂进行微多普勒效应试验。此处雷达反射材料为反射增强膜,包括可反射毫米波的聚酯反射膜,优选型号为Energy Shield 200-10oz的反射膜,或金属铝材料薄膜。所述座位部1c中设置有容纳所述第三反射膜33的空腔。车轮采用耐磨的高分子材料,车轮与地面接触,容易产生磨损,在车轮内部轮毂位置嵌入高分子复合能量反射材料,使其满足毫米波雷达反射性能,特别是微多普勒效应。
踏板式摩托车模型的主体材料采用轻质柔软多孔的非金属材料特别是易加工、耐撞击不易撕裂的珍珠棉(EPE)和耐磨损的EVA,这两种非金属材料的毫米波雷达反射性能(特别是RCS值)远不如金属材料,且极大的保护了测试车辆,只需在其内部添加对毫米波具有强反射特性的材料即可满足踏板式摩托车模型的雷达反射性能,而不需要再添加其他吸波材料减弱毫米波反射性能,
在本实施例中,反射增强膜可增强毫米波的反射性能(特别是RCS值),此种高分子复合能量反射材料对安装角度要求极高,安装平面需要垂直雷达方向,且该材料的安装面积与其毫米波反射性能成正相关,因此通过逐渐增加反射增强膜的面积使其最终与真实踏板式摩托车的毫米波反射性能一致。由此使踏板式摩托车模型多个角度的毫米波反射特性与真实踏板式摩托车一致。
此外,智能驾驶测试的踏板式摩托车模型包括设置在车身1外的车衣,所述车衣的材质包括反射布料,毫米波雷达反射布采用上下两面成型PVC膜为基材,在双面pvc夹层之间添加纤维以增强布料耐磨以及抗拉特性,反射布具有弱毫米波雷达反射特性。车衣与车身1之间通过尼龙搭扣连接或者通过缝合包覆。车身1、后备箱9、轮胎支架均由反射布料包裹,当踏板式摩托车模型被测试车辆撞击时,可以保护内部轻质柔软多孔的非金属材料不被撕裂,在不添加任何增强雷达反射特性材料的情况下,车衣也能具有一定毫米波反射能力。座椅和踏板与真实踏板式摩托车一致,采用黑色车衣;车身1外周和后备箱9可采用白色、浅蓝色、棕色或者其他颜色,轮胎支架上包覆的车衣采用银白色,保持与真实踏板式摩托车轮胎的金属支架外观一致。这些部位覆盖的车衣可以由不同颜色组成,以满足不同型号车辆颜色不同的测试需求。
在本实施例中,所述智能驾驶测试的踏板式摩托车模型包括设置在所述车架下方的滑动平台22,所述滑动平台22在滑动状态下,所述前轮胎4和后轮胎6与地面接触并转动。车体底部由四个支撑柱21支撑,支撑柱21与滑动平台22采用磁性连接方式,结构牢靠,撞击可分离。行进过程中,车轮与地面不打滑,在不同行进速度下,其车轮与真车车轮转速保持一致,可以满足不同速度下车轮产生不同的微多普勒效应,可以满足50km/h速度以下的任何一种测试需求。
在本实施例中,车尾位置安装有由珍珠棉(EPE)加工而成的车轮挡泥板7,其上安装有与真车一样材质和外观的号码牌,使其在外观上与真车保持一致。后备箱9的形状大小与真实踏板式摩托车一致,其外表包覆有反射布料,其与车体的连接方式采用的是粘扣带,材质采用密度小的泡沫制成,在受到撞击时可脱落,而不会对踏板式摩托车模型和测试车辆产生损坏。
本发明中的踏板式摩托车模型能在多方面模拟真车的物理特性,其表面覆盖的车衣以及内部嵌入的高分子复合材料使其具有同真车一样的毫米波雷达反射特性(特别是RCS值,雷达散射截面(Radar Cross section,缩写RCS))。其三维尺寸均与真车一致,可被激光雷达检测到;其外观能够模拟真车的照明灯,后视镜2,示廓灯,尾灯,挡泥板7,车牌,座椅和踏板,使其能够被车载摄像头检测识别。其可转动的轮胎能够与地面接触并且转动,在行进过程具有与真车一样的微多普勒效应。其结构在被汽车撞击时,能够分散成多个部分,避免测试车辆受到损伤,也使得本发明中的踏板式摩托车模型内部结构不被损坏,重新安装即可进行下一次的测试,如此可反复多次使用(延长使用次数)。
在以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 用于智能驾驶测试的踏板式摩托车模型
- 用于智能驾驶测试的踏板式摩托车模型