一种基于风速风向传感器的旋翼无人机控制系统及方法
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及旋翼无人机控制领域,具体地说是一种基于风速风向传感器的旋翼无人机控制系统及方法。
背景技术
旋翼无人机能够垂直起降、机动灵活,使用范围不断扩大,除商业消费外,工业环境应用也逐渐增加,因而对其稳定性有着更进一步的要求。但是常规串级控制量由位置环逐层计算并执行,这带来了滞后与不确定性。当外界存在较大风扰动时,这种滞后特性将被串级控制中的积分项进一步放大,需要通过增加抗风扰功能提升其稳定性。
发明内容
针对现有技术的不足,本发明目的是提供一种基于风速风向传感器的旋翼无人机控制系统,可实现环境风矢量的测量、风扰加速度解算与反馈,并结合风扰信息进行反馈补偿控制,增强系统的稳定性。
本发明为实现上述目的所采用的技术方案是:一种基于风速风向传感器的旋翼无人机控制系统,包括:设置在旋翼无人机上的风扰加速度传感系统和加速度反馈控制系统;
其中,所述风扰加速度传感系统包括:风速风向传感器、滤波器、风扰加速度计算模块、通信模块A;
所述风速风向传感器经滤波器与风扰加速度计算模块连接,将检测的风矢量数据经滤波器滤波后发送至风扰加速度计算模块等待处理;
所述风扰加速度计算模块与通信模块A连接,并与加速度反馈控制系统无线通信,所述风扰加速度计算模块接受加速度反馈控制系统检测的旋翼无人机姿态信息,并根据风矢量数据、旋翼无人机姿态信息以及旋翼无人机自身参数,得到风扰加速度,并将得到的风扰加速度经通信模块A发送至加速度反馈控制系统。
所述风速风向传感器为三轴风速计。
所述滤波器为多频滤波器。
所述加速度反馈控制系统,包括:组合导航、PID控制器、动力执行器、补偿控制器以及通信模块B;
所述组合导航,分别与通信模块B和PID控制器连接,用于将姿态信息发送给通信模块B,将获取旋翼无人机当前的位置信息、速度信息、姿态信息与角速度信息发送给PID控制器;
通信模块B与补偿控制器相连,用于将接收到组合导航获取的姿态信息发送通信模块A,并将风扰加速度计算模块解算的风扰加速度信息发送给补偿控制器;
所述补偿控制器,其输入端与通信模块B连接,输出端分别与PID控制器及动力执行器连接,用于接收通信模块B发送的风扰加速度信息,获取当前风扰加速度下的稳态平衡姿态,将此稳态平衡姿态作为补偿控制量发送给PID控制器作为姿态控制前馈;并根据垂直方向风扰加速度计算风扰下的垂向附加受力,得到升力补偿量发送给PID控制器;
PID控制器,与组合导航系统、补偿控制器及动力执行器相连,用于接收组合导航发出的位置信息、速度信息、姿态信息与角速度信息,接收补偿控制器发出的补偿控制量和升力补偿量,发送计算的控制律至动力执行器,实现对旋翼无人机的控制。
所述PID控制器包括位置PID控制器、速度PID控制器、姿态PID控制器以及角速度PID控制器,均与组合导航连接并分别接收位置信息、速度信息、姿态信息与角速度信息;
所述位置PID控制器与速度PID控制器连接,用于生成速度期望发送至速度PID控制器;
所述速度PID控制器与补偿控制器以及动力执行器连接,用于生成原生姿态期望发送至姿态PID控制器,生成原生升力期望发送至动力执行器
所述姿态PID控制器分别与补偿控制器和角速度PID控制器连接,用于接收补偿控制器发送的补偿控制量作为前馈输入,生成角速度期望发送至角速度PID控制器;
所述角速度PID控制器与动力执行器连接,用于生成角加速度期望并发送至动力执行器
一种基于风速风向传感器的旋翼无人机控制方法,包括以下步骤:
1)获取旋翼无人机本体参数,根据组合导航获取的旋翼无人机姿态信息,通过风动试验进行拟合获取测量风速风向与风扰加速度的拟合关系函数,即气动模型;将气动模型储存至风扰加速度计算模块,等待调用;
2)风速风向传感器采集旋翼无人机的风矢量信息,并发送至多频滤波器;
3)多频滤波器接收到风速风向传感器的风矢量信息,对风矢量信息中数据进行滤波,并将滤波后的风矢量信息发送至风扰加速度计算模块;
4)风扰加速度计算模块根据接收到旋翼无人机姿态信息、旋翼无人机参数以及风速风向传感器测得的风矢量信息,通过储存在风扰加速度计算模块的气动模型,获取的风扰加速度信息,并发送至通信模块B,通过通信模块B将风扰加速度信息发送至补偿控制器;
5)补偿控制器接收到风扰加速度信息后进行处理,得到补偿控制量以及升力补偿量,分别发送给姿态PID控制器和动力执行器;
6)旋翼无人机的组合导航将位置信息、速度信息、姿态信息以及角速度信息分别发送至位置PID控制器、速度PID控制器、姿态PID信息以及角速度PID控制器进行处理,得到升力期望和角加速度期望;并发送至动力执行器,
7)动力执行器根据角加速度期望和升力期望,实现对在旋翼无人机受到风扰环境下的控制。
所述步骤5),具体为:
恒定风速风向下使无人机处于稳定状态,根据水平方向上的风扰加速度与姿态的拟合关系得出当前风扰加速度下的旋翼无人机姿态,即稳态平衡姿态,将此稳态平衡姿态作为补偿控制量发送给姿态PID控制器作为姿态控制前馈;
根据垂直方向上风扰加速度,得到风扰下的垂向附加受力大小作为升力补偿量发送给升力PID控制器。
所述步骤6),具体为:
PID控制器采用串级PID形式,位置控制器通过位置期望与当前位置做差获得三维位置偏差矢量,通过位置PID控制器生成速度期望;
速度控制器通过速度期望与当前速度做差获得三维速度偏差矢量,通过速度PID控制器生成原生姿态期望与原生升力期望;其中原生姿态期望通过水平方向速度偏差进行PID控制律运算生成,原生升力期望通过垂直方向速度偏差进行PID控制律运算生成;
将原生升力期望叠加补偿控制器的升力补偿量得到升力期望发送至动力执行器;
将稳态平衡姿态补偿控制量做为前馈输入与原生姿态期望叠加,获得姿态角期望,通过姿态期望与当前姿态进行PID控制律运算生成角速度期望,通过角速度期望与当前角速度进行PID控制律运算生成角加速度期望,并将角加速度期望发送给动力执行器。
所述步骤7),具体为:
通过旋翼无人机转动惯量J与角加速度期望计算旋翼之间的期望拉力差,通过期望升力计算总拉力,得到各旋翼拉力后通过电机、旋翼气动力特性曲线获得转速期望,由转速控制器通过脉宽调制波对旋翼转速进行控制。
本发明具有以下有益效果及优点:
1、本发明能够提升旋翼无人机的抗风能力,通过姿态前馈,能够使无人机快速达到稳定状态,提升飞行稳定性。
2、本发明在动力分配上采用直接补偿的方式,执行速度更快,动力分配更加优化。
附图说明
图1为本发明系统示意图
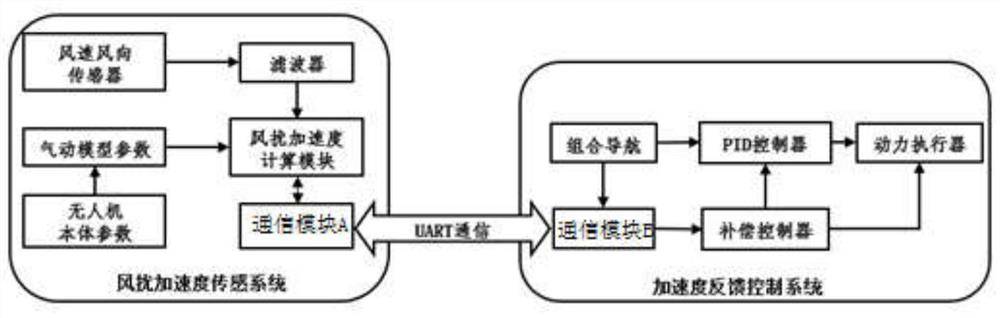
图2为本发明系统组成结构示意图。
图3为本发明中加速度反馈控制系统控制流程框图。
图4为本发明中风洞测试过程中无人机平台受力特性分析图。
图5为本发明中无人机平台抗风悬停时的受力特性分析图。
其中,1为风扰加速度传感系统,2为无人机平台,3为动力执行系统,4为悬吊固定绳索。
具体实施方式
下面结合附图及实施例对本发明做进一步的详细说明。
如图1所示,一种基于风速风向传感器的旋翼无人机控制系统,无人机基础系统平台为工字型四旋翼无人机。
其中,风扰加速度传感系统,测量风矢量信息并转化为风扰加速度信息,发送给加速度反馈控制系统;
加速度反馈控制系统,接收风扰加速度信息进行加速度反馈控制,提升无人机抗风扰能力。
风扰加速度传感系统通过风速风向传感器测量风矢量,将风速大小与风向角度通过多频段组合滤波器后,结合所辨识拟合的气动模型求出无人机所受风扰动大小与风扰加速度信息。
多频段组合滤波器的高频截止频率为无人机旋翼动力振动频率、无人机机体共振频率与无人机动态响应频率三者中的的最小值,低频截止频率为自然风平均频率的0.8倍。
气动模型通过风洞试验拟合获取,将无人机平行于动力平面水平悬挂,进行不同大小与方向的吹风测试,获取姿态信息并进行三轴投影确定无人机姿态与相对风向,将风速、风向与稳态姿态角拟合,结合无人机质量、稳态风矢量与姿态角获取无人机的气动特性。
所述加速度反馈控制系统采用基于加速度反馈的扰动补偿控制器。
所述基于加速度反馈的扰动补偿控制器对原生PID控制器进行期望补偿与执行器补偿。
期望补偿为前馈形式,通过气动辨识参数过程获取风矢量与稳态姿态关系,确定期望姿态,作为姿态控制期望输入给无人机姿态环。
执行器补偿为旋翼动力补偿形式,通过风扰加速度信息,计算风扰力,结合电机与旋翼的气动力特性,调节电机转速,进行动力补偿,抵消风扰。
如图2所示,旋翼无人机抗风扰系统包括风扰加速度传感系统与加速度反馈控制系统,风扰加速度传感系统由风速风向传感器、多频滤波器、气动计算模型、风扰加速度计算单元与IO通信模块1构成;加速度反馈控制系统由通信模块B、组合导航系统、PID控制器、补偿控制器与动力执行器构成。系统中,除加速度反馈控制系统输出PWM控制信号为模拟信号传输外,其他数据通讯均采用UART有线传输。
风扰加速度传感系统构成与执行流程如下:
风速风向传感器为WindMaster三轴风速计,通过超声波测速原理测量传感器三轴X轴,Y轴,Z轴的风速分别W
传感器坐标系下的水平风向夹角为:
传感器坐标系下的航向风向夹角为:
则输出风矢量信息为:
Wind=[W
即风速与风向信息,至多频滤波器,输出频率为20Hz。
多频滤波器接收风速风向传感器信息,并对数据进行滤波,风速信息高频截止频段为5Hz,低频截止频段为0.1Hz;风向信息高频截止频率为1Hz。多频滤波器处理过的数据发送至风扰加速度计算模块。
如图4所示,气动模型通过风洞试验拟合获取,首先将无人机固连悬挂使动力平面水平,进行不同大小与方向的吹风测试,在恒定风速风向下使无人机处于稳定状态,在此,以风向平行于无人机X轴进行风洞测试为例。读取稳态无人机横滚、俯仰、航向姿态信息att
无人机水平受力如下:
以风向平行于无人机X轴进行风洞测试,通过组合导航获取稳态无人机姿态信息att
水平受力如下式:
F
垂向受力如下式:
F
其中,G=mg为旋翼无人机的重力,F
可得:
平行于Y轴时,计算的姿态角为roll,可得:
可获得测量风速风向与风扰加速度的拟合关系函数:
a
其中,a
即气动模型为:
a
该拟合关系函数即为气动模型。该气动模型存储于风扰加速度计算模块中,通过计算拟合函数的方法根据风矢量信息确定风扰加速度。
通信模块A连接通信模块B与风扰加速度计算模块,从通信模块B接收加速度反馈控制系统发出的无人机姿态信息att
风扰加速度计算模块连接多频滤波器与通信模块A,接收多频滤波器发送的滤波后的风速风向信息、通信模块A发送的无人机姿态信息,通过气动模型计算风扰加速度信息并发送至通信模块A。
如图3所示,加速度反馈控制系统构成与执行流程如下:
加速度反馈控制系统的实现平台为一个Pixhawk开源飞行控制模块,集成组合导航系统、通信模块B、PID控制器、补偿控制器与动力执行器。
组合导航系统包括惯性导航系统、定位系统与磁力计,能够解算无人机当前姿态,与通信模块B相连及PID控制器相连,将姿态信息发送给通信模块B,将位置信息、速度信息、姿态信息与角速度信息发送给PID控制器。
通信模块B与组合导航系统及补偿控制器相连,将姿态信息发送给风扰加速度传感系统中的通信模块A,将风扰加速度信息发送给补偿控制器。
补偿控制器与通信模块B、PID控制器及动力执行器相连,接收通信模块B发送的风扰加速度信息,根据水平方向风扰加速度与稳态姿态的拟合关系计算出当前风扰加速度下的稳态平衡姿态,即:
a
将此稳态平衡姿态作为补偿控制量发送给PID控制器作为姿态控制前馈;
根据垂直方向风扰加速度,得到风扰下的垂向附加受力大小为:
F
将升力补偿量F
PID控制器与组合导航系统、补偿控制器及动力执行器相连,接收组合导航发出的位置信息、速度信息、姿态信息与角速度信息,接收补偿控制器发出的补偿控制量和升力补偿量,发送计算的控制律至动力执行器,实现对旋翼无人机的控制。PID控制器采用串级PID形式,位置控制器通过位置期望与当前位置做差获得三维位置偏差矢量,进行PID控制律运算生成速度期望;速度控制器通过速度期望与当前速度做差获得三维速度偏差矢量进行PID控制律运算生成原生姿态期望与原生升力期望,其中原生姿态期望通过水平方向速度偏差进行PID控制律运算生成,原生升力期望通过垂直方向速度偏差进行PID控制律运算生成。将原生升力期望叠加补偿控制器的升力补偿量得到升力期望发送至动力执行器;将稳态平衡姿态补偿控制量做为前馈输入与原生姿态期望叠加,获得姿态角期望,通过姿态期望与当前姿态进行PID控制律运算生成角速度期望,通过角速度期望与当前角速度进行PID控制律运算生成角加速度期望,并将角加速度期望发送给动力执行器。
原生即PID控制器计算的,PID中包含积分项,当输出量不足的时候回逐渐增加输出,直至稳定,通过补偿的方式可以加快速度,避免积分过程;
旋翼机的姿态和水平加速度挂钩,升力和垂向加速度挂钩。
旋翼机俯仰状态,旋翼的风向斜后侧吹,分解为升力和水平推力,产生加速度。
动力执行器包括转速控制器、电子调速器、电机与旋翼,转速控制器计算并发出脉宽调制波至电子调速器,控制电机、旋翼转速调整拉力大小。
动力执行器与PID控制器连接,接收角加速度期望与升力期望,通过无人机转动惯量J与角加速度期望计算旋翼之间的期望拉力差,通过期望升力计算总拉力,计算各旋翼拉力后通过电机、旋翼气动力特性曲线获得转速期望,由转速控制器通过脉宽调制波对旋翼转速进行控制。
无人机转动惯量J通过摆锤法测量,电机、旋翼气动力特性曲线通过旋翼测试台测试或查表获得,将控制脉宽调制波与旋翼拉力拟合获得关系曲线。
如图5所示,旋翼无人机在外界有风扰的情况下,通过调节自身姿态并进行升力补偿,于水平方向与垂直方向能够实现受力平衡,抵消风扰影响;在加速度反馈控制系统的作用下,结合风扰加速度反馈获取姿态与升力的稳态前馈,能够加快稳态收敛,减少积分项超调,降低风扰对旋翼无人机系统的影响。
- 一种基于风速风向传感器的旋翼无人机控制系统及方法
- 一种基于风速风向传感器的旋翼无人机控制系统及方法