无约束共心光束族的汽车视觉检测误差评价方法与系统
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及一种汽车检测领域的检测误差评价系统与方法,更具体的说,它是一种无约束共心光束族的汽车视觉检测误差评价方法与系统。
背景技术
近年来随着汽车检测诊断行业的发展,汽车检测系统的精度也受到了进一步关注。无约束共心光束族的汽车视觉检测系统是一种基于机器视觉技术的车辆检测系统,但目前没有关于该系统检测精度相关影响因素的精确分析方法。针对这个问题,提出了一种无约束共心光束族的汽车视觉检测误差评价方法与系统,该方法可对造成无约束共心光束族的汽车视觉检测系统(公开号:CN109540040A)重建激光车身交线点精度的影响因素进行分析,研究各因素对其检测精度的影响,并利用误差评价系统进行相应的实验验证评价方法的准确性。
发明内容
本发明针对解决无约束共心光束族的汽车视觉检测系统的检测精度缺乏定量研究的现状,提出了一种性能可靠、结构简单、操作简便的方法与系统,实现对激光交线点重建精度各影响因素的分析。通过对各因素偏导数的求解分析了摄像机内参数、外参数、以及激光交线点图像坐标等因素对系统精度的影响。
结合说明书附图,本发明采用如下技术方案予以实现:
无约束共心光束族的汽车视觉检测误差评价方法的具体步骤如下:
第一步:获得无约束共心光束族的汽车视觉检测误差评价方法检测精度的影响因素:
摄像机坐标系下激光交线点的三维坐标
其中,
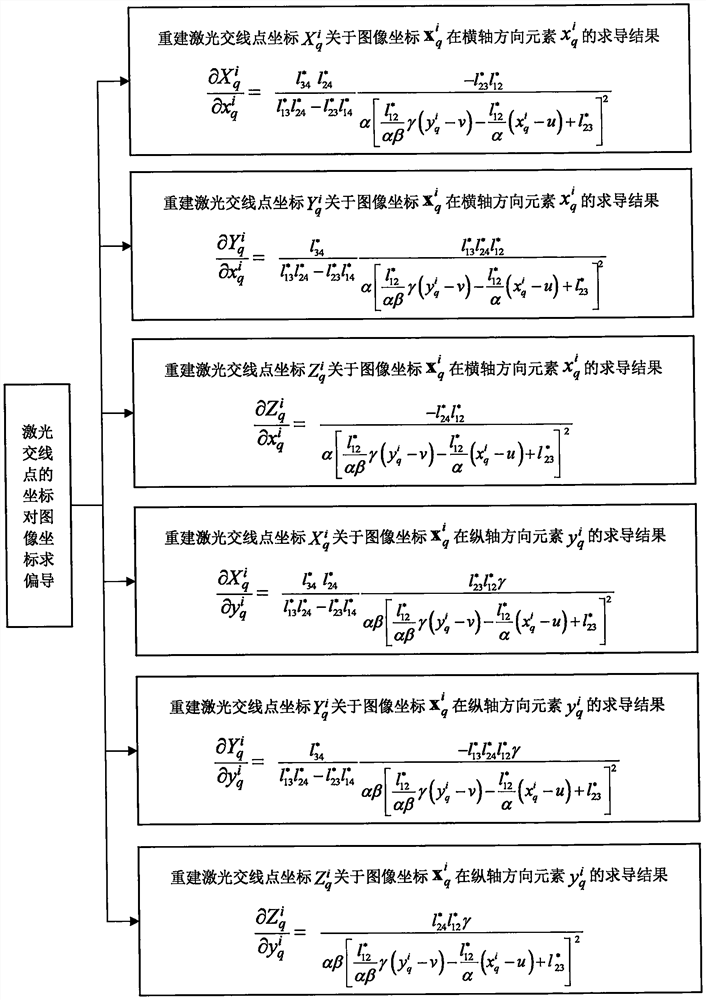
第二步:激光交线点的图像坐标对重建激光交线点的三维坐标值精度影响:
对激光交线点的图像坐标
对激光交线点的图像坐标
第三步:摄像机内参数K对重建激光交线点的三维坐标值精度影响:
对摄像机内参数K中的α元素进行求导,即可得到
对摄像机内参数K中的β元素进行求导,即可得到
对摄像机内参数K中的γ元素进行求导,即可得到
对摄像机内参数的内参数K中的u元素进行求导,即可得到
对摄像机内参数K中的v元素进行求导,即可得到
第四步:摄像机外参数平移向量对重建激光交线点的三维坐标值精度影响:
对摄像机外参数的平移向量t
经过进一步计算可得
第五步:无约束共心光束族的汽车视觉检测误差评价方法准确性的试验验证:
无约束共心光束族的汽车视觉检测系统1放置在地面上,移动二维靶标与摄像机之间保持不同距离,当二维靶标移动时,调整误差分析板2的位置,使误差分析板2上的标准圆始终与激光线束相交,即可实现二维靶标与摄像机不同距离时的结果检测,通过比较重建半径与标准圆半径的大小,可验证第四步中对摄像机外参数平移向量中的三个元素进行求导分析的准确性。
无约束共心光束族的汽车视觉检测误差评价系统包括有误差分析板;
技术方案所述的误差分析板为钢板制成的矩形零件,且表面贴有标准圆图案。
本发明的有益效果是:
(1)本发明构建了无约束共心光束族的汽车视觉检测系统的误差评价模型。通过将激光束与误差分析板2上的标准圆相交,并在摄像机与二维靶标的不同距离条件下,通过比较标准圆半径与重建结果的大小,验证误差评价方法的准确性。
(2)本发明采用的误差分析板2上标准圆图案为打印机印制,具有较高的精度,能够有效降低误差评价系统的自身装置误差,提高评价的准确度。
(3)本发明仅需对无约束共心光束族检测系统增加一个误差分析板2即可完成对该系统精度的影响因素分析,具有结构简单、性能可靠、操作简便、适用范围广等优点。
附图说明
图1是无约束共心光束族的汽车视觉检测误差评价方法中求解摄像机坐标系下激光交线点的三维坐标的流程图;
图2是无约束共心光束族的汽车视觉检测误差评价方法中图像坐标对重建点三维坐标的影响分析流程图;
图3是无约束共心光束族的汽车视觉检测误差评价方法中摄像机内参数中焦距元素α对重建点三维坐标的影响分析流程图;
图4是无约束共心光束族的汽车视觉检测误差评价方法中摄像机内参数中焦距元素β对重建点三维坐标的影响分析流程图;
图5是无约束共心光束族的汽车视觉检测误差评价方法中摄像机内参数中扭曲元素γ对重建点三维坐标的影响分析流程图;
图6是无约束共心光束族的汽车视觉检测误差评价方法中摄像机内参数中主点坐标元素对重建点三维坐标的影响分析流程图;
图7是无约束共心光束族的汽车视觉检测误差评价方法中摄像机外参数平移向量中的元素对重建点三维坐标的影响分析流程图;
图8是无约束共心光束族的汽车视觉检测的误差评价系统的轴测图;
图9是无约束共心光束族的汽车视觉检测的误差评价系统中误差分析板2的轴测图;
图中:1.无约束共心光束族的汽车视觉检测系统,2.误差分析板。
具体实施方式
下面结合附图对本发明作进一步的详细描述:
参阅图1至图7,无约束共心光束族的汽车视觉检测误差评价方法可分为以下五步:
第一步:获得无约束共心光束族的汽车视觉检测误差评价方法检测精度的影响因素:
摄像机坐标系下激光交线点的三维坐标
其中,
第二步:激光交线点的图像坐标对重建激光交线点的三维坐标值精度影响:
对激光交线点的图像坐标
对激光交线点的图像坐标
第三步:摄像机内参数K对重建激光交线点的三维坐标值精度影响:
对摄像机内参数K中的α元素进行求导,即可得到
对摄像机内参数K中的β元素进行求导,即可得到
对摄像机内参数K中的γ元素进行求导,即可得到
对摄像机内参数的内参数K中的u元素进行求导,即可得到
对摄像机内参数K中的v元素进行求导,即可得到
第四步:摄像机外参数平移向量对重建激光交线点的三维坐标值精度影响:
对摄像机外参数的平移向量t
经过进一步计算可得
第五步:无约束共心光束族的汽车视觉检测误差评价方法准确性的试验验证:
无约束共心光束族的汽车视觉检测系统1放置在地面上,移动二维靶标与摄像机之间保持不同距离,当二维靶标移动时,调整误差分析板2的位置,使误差分析板2上的标准圆始终与激光线束相交,即可实现二维靶标与摄像机不同距离时的结果检测,通过比较重建半径与标准圆半径的大小,可验证第四步中对摄像机外参数平移向量中的三个元素进行求导分析的准确性。
参阅图8至图9,无约束共心光束族的汽车视觉检测误差评价系统包括误差分析板2。
误差分析板2为钢板制成的矩形零件,且表面贴有标准圆图案。
- 无约束共心光束族的汽车视觉检测误差评价方法与系统
- 基于无约束共心光束族汽车形貌主动视觉检测系统与方法